【57】条纹结构光三维重建:从双目匹配到相位解算的核心技术解析
在近景三维重建领域,结构光技术凭借高精度与抗弱纹理干扰的特性,成为工业工件检测、逆向工程等场景的“标配”。不过,复杂室外环境(如强光、动态干扰)仍会影响其性能。目前结构光主要分为线结构光与条纹结构光两类——前者适合轮廓扫描,后者更擅长面阵式三维重建。本文将从条纹结构光入手,揭示其从原理到关键技术的完整逻辑。
简介
在近景三维重建领域,结构光技术凭借高精度与抗弱纹理干扰的特性,成为工业工件检测、逆向工程等场景的“标配”。不过,复杂室外环境(如强光、动态干扰)仍会影响其性能。目前结构光主要分为线结构光与条纹结构光两类——前者适合轮廓扫描,后者更擅长面阵式三维重建。本文将从条纹结构光入手,揭示其从原理到关键技术的完整逻辑。
1 从双目匹配到结构光:解决弱纹理的关键思路
典型的双目条纹结构光系统由两台相机与一台投影仪组成——若移除投影仪,它就是一套标准的双目立体匹配设备。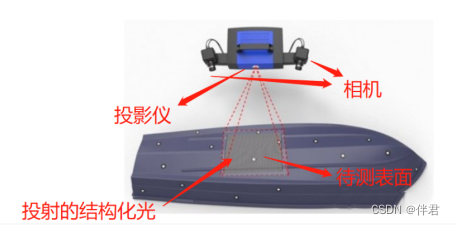
双目重建的核心是通过视差计算三维信息:左右相机拍摄同一物体,利用人眼“双目定位”的原理,先通过SIFT、SURF或ORB等特征描述子提取图像中的显著点(如边角、纹理突变处),再借助极线约束(将同名点搜索范围限定在一条直线上,把匹配复杂度从n²级降至线性)完成点对匹配,最后通过三角测量公式得到三维坐标。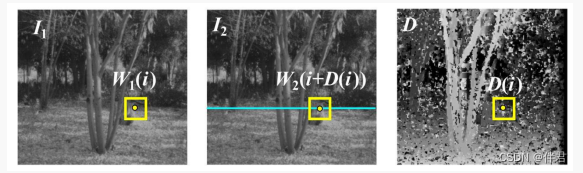
但这个方案有个致命缺陷:当物体表面缺乏纹理时(如刚加工的金属工件、光滑塑料件),特征描述子无法提取有效点,匹配直接失效。比如下图中刚铣削完的铝件,表面几乎没有可识别的纹理,双目系统根本无法找到同名点。
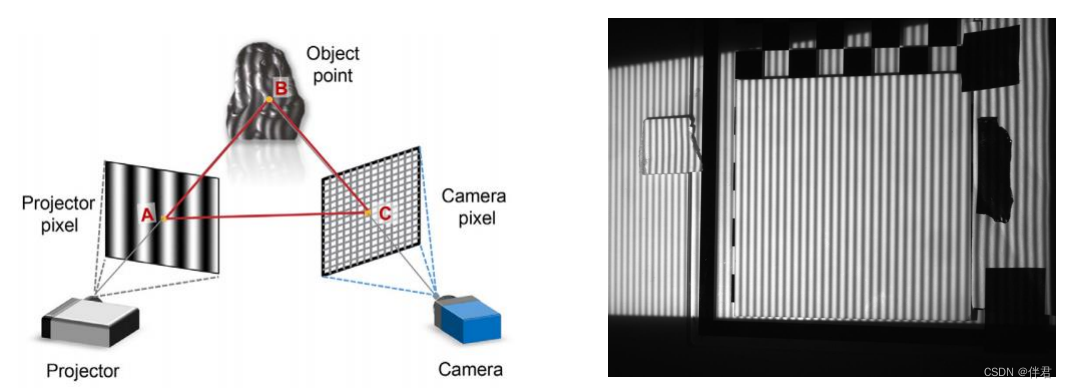
如何破局?答案是主动投射结构化光——通过投影仪向物体表面“写入”人工纹理(如条纹、编码图案),强制为每个像素赋予可识别的“特征标识”。这一思路彻底解决了弱纹理问题,但仍受限于物体材质:高反光区域会“淹没”条纹细节,透明材质会导致光的透射干扰,这些我们后续再展开。
2 相移法+多频外差法:主动编码的核心工具
条纹结构光的关键是用周期性条纹为像素“编码”,其中最常用的是N步相移条纹——通过连续投射多幅相位递增的正弦条纹,捕捉物体表面的形变信息。
2.1 条纹的设计逻辑:从理想到实际
计算机生成的理想条纹(待投影仪投射)与相机捕获的形变条纹(物体表面造成的扭曲)有两个核心特点:
- 单方向编码:条纹沿固定方向(如水平)排列,配合极线约束可将同名点搜索范围从“全图”缩小到“一条线”,大幅降低计算量;
- 多周期灰度变化:一个视场内包含多个条纹周期(如10~20个),确保每个像素都能被唯一标识(类似“空间坐标的条形码”)。
相移条纹的生成遵循严格的数学公式。假设投影N步相移条纹,第k步(k=0,1,…,N-1)的条纹灰度值可表示为:Ik(x,y)=A+B⋅cos(2πfxW+2πkN) I_k(x,y) = A + B \cdot \cos\left( \frac{2\pi f x}{W} + \frac{2\pi k}{N} \right) Ik(x,y)=A+B⋅cos(W2πfx+N2πk)
其中:
- AAA:背景光强(条纹的平均灰度,决定整体亮度);
- BBB:调制强度(条纹的灰度波动幅度,决定条纹的清晰度);
- fff:条纹频率(单位视场内的条纹周期数,频率越高,编码精度越高);
- WWW:投影仪的横向分辨率(如1920像素);
- 2πkN\frac{2\pi k}{N}N2πk:第k步的相移量(每步相位递增2πN\frac{2\pi}{N}N2π,确保多幅条纹的相位差均匀)。
理想情况下,投影仪投射的是规则的正弦条纹,但当条纹遇到三维物体表面时,会因物体高度变化产生扭曲——相机捕获的条纹形变程度,直接对应物体表面的深度信息。这也是后续相位解算(从条纹形变中提取深度)的关键依据。
获取更多资料
我给大家整理了一套全网最全的人工智能学习资料(1.5T),包括:机器学习,深度学习,大模型,CV方向,NLP方向,kaggle大赛,实战项目、自动驾驶,AI就业等免费获取。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 26
26 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)