基于EMplanner的自动驾驶路径规划算法与动态二次规划实现》——精简版Cpp代码解析与配置指南
自动驾驶路径规划算法(EMplanner cpp版) 动态规划+二次规划算法 精简EMplanner的cpp实现 实现静态障碍物避障 注意不包括速度规划 带有注释,逻辑清晰 方便初学者入门,小白友好 需配置第三方库: Eigen, OSQP,需安装python2.7(画图使用,cpp调用matplotlibcpp文件实现画图功能)
刚摸到自动驾驶路径规划的时候,总觉得那些算法像黑盒子。今天咱们直接撸代码,用C++实现一个简化版的EMPlanner,手把手看它怎么绕开静态障碍物。这里只用路径规划,暂时不碰速度部分,咱先把路线画明白。
一、动态规划探路
动态规划(DP)在这里的作用是生成粗路径。想象你在迷宫里扔出一把石子,看哪条路能绕开障碍物,我们就用类似的思路:
// DP路径结构体
struct DpPath {
std::vector<double> s; // 纵向距离
std::vector<double> l; // 横向偏移
double total_cost = 0.0; // 路径总成本
};
// 障碍物信息
struct Obstacle {
double s; // 纵向位置
double l; // 横向位置
double radius; // 膨胀半径
};
// DP核心计算
DpPath dynamicProgramming(const std::vector<Obstacle>& obstacles) {
const int N = 50; // 路径点数量
const double delta_s = 1.0; // 纵向间隔
const double delta_l = 0.5; // 横向步长
std::vector<std::vector<double>> cost(N, std::vector<double>(5, INFINITY));
cost[0][2] = 0.0; // 起点居中
// 状态转移
for (int i = 0; i < N-1; ++i) {
for (int dl : {-2, -1, 0, 1, 2}) { // 横向变化量
double current_l = dl * delta_l;
// 障碍物碰撞检测
bool collision = false;
for (const auto& obs : obstacles) {
if (fabs(i*delta_s - obs.s) < 3.0 &&
fabs(current_l - obs.l) < obs.radius) {
collision = true;
break;
}
}
if (collision) continue;
// 计算转移成本
for (int next_dl : {-1, 0, 1}) { // 限制横向变化率
double next_l = current_l + next_dl * delta_l;
double new_cost = cost[i][dl+2] +
fabs(next_dl)*0.3 + // 横向变化惩罚
fabs(next_l)*0.1; // 偏离中心惩罚
if (new_cost < cost[i+1][next_dl+2]) {
cost[i+1][next_dl+2] = new_cost;
}
}
}
}
// 回溯路径...(具体实现略)
}这里横向变化限制为±1步长,避免急打方向。障碍物检测用了膨胀半径,相当于给障碍物加了个安全距离。实际工程中会考虑更多代价项,比如靠近车道线的惩罚。
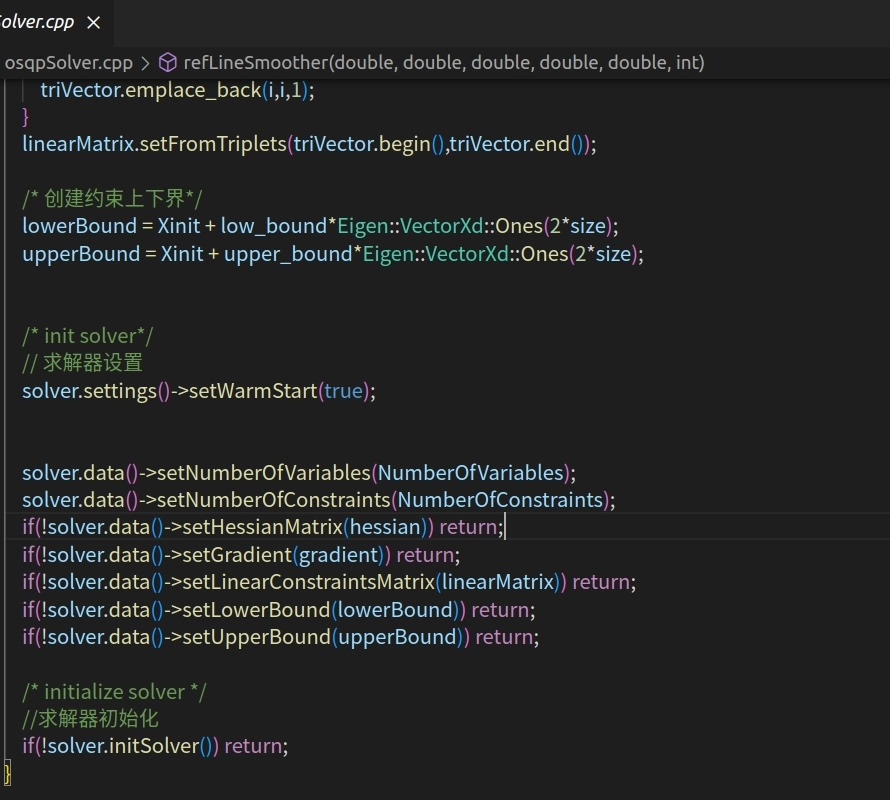
二、二次规划精修
拿到DP的粗路径后,二次规划(QP)负责把它变成平滑可用的轨迹:
#include <osqp/osqp.h>
void quadraticProgramming(const DpPath& dp_path) {
// 构建目标函数: min 0.5*x'Px + q'x
Eigen::MatrixXd P = Eigen::MatrixXd::Identity(3,3) * 0.1;
Eigen::VectorXd q = Eigen::VectorXd::Zero(3);
// 约束条件 Ax = b
Eigen::MatrixXd A(2,3);
A << 1, dp_path.s[0], dp_path.s[0]*dp_path.s[0],
1, dp_path.s.back(), dp_path.s.back()*dp_path.s.back();
Eigen::VectorXd b(2);
b << dp_path.l[0], dp_path.l.back(); // 保持起点终点位置
// 转换为OSQP格式
OSQPData *data = (OSQPData*)malloc(sizeof(OSQPData));
data->n = 3; // 变量数
data->m = 2; // 约束数
// ...矩阵填充细节
OSQPSettings *settings = (OSQPSettings *)malloc(sizeof(OSQPSettings));
osqp_set_default_settings(settings);
OSQPWorkspace *work = osqp_setup(data, settings);
osqp_solve(work);
// 提取结果
double a = work->solution->x[0];
double b = work->solution->x[1];
double c = work->solution->x[2];
// 生成平滑路径...
}这里用二次多项式拟合路径,保持起点终点位置不变。实际应用会增加曲率约束等条件,防止轨迹曲率过大。
三、障碍物怎么绕
静态障碍物处理主要在DP阶段:
// 在DP代价计算中加入障碍物距离项
double obstacle_cost = 0.0;
for (const auto& obs : obstacles) {
double dist = sqrt(pow(s - obs.s, 2) + pow(l - obs.l, 2));
if (dist < obs.radius) {
obstacle_cost += 1000.0; // 碰撞惩罚
} else {
obstacle_cost += 1.0 / (dist - obs.radius); // 距离越近代价越高
}
}这种处理让路径自然远离障碍物,同时保持安全距离。实际项目会采用S-T图等方式处理动态障碍物,这里只处理静态情况。
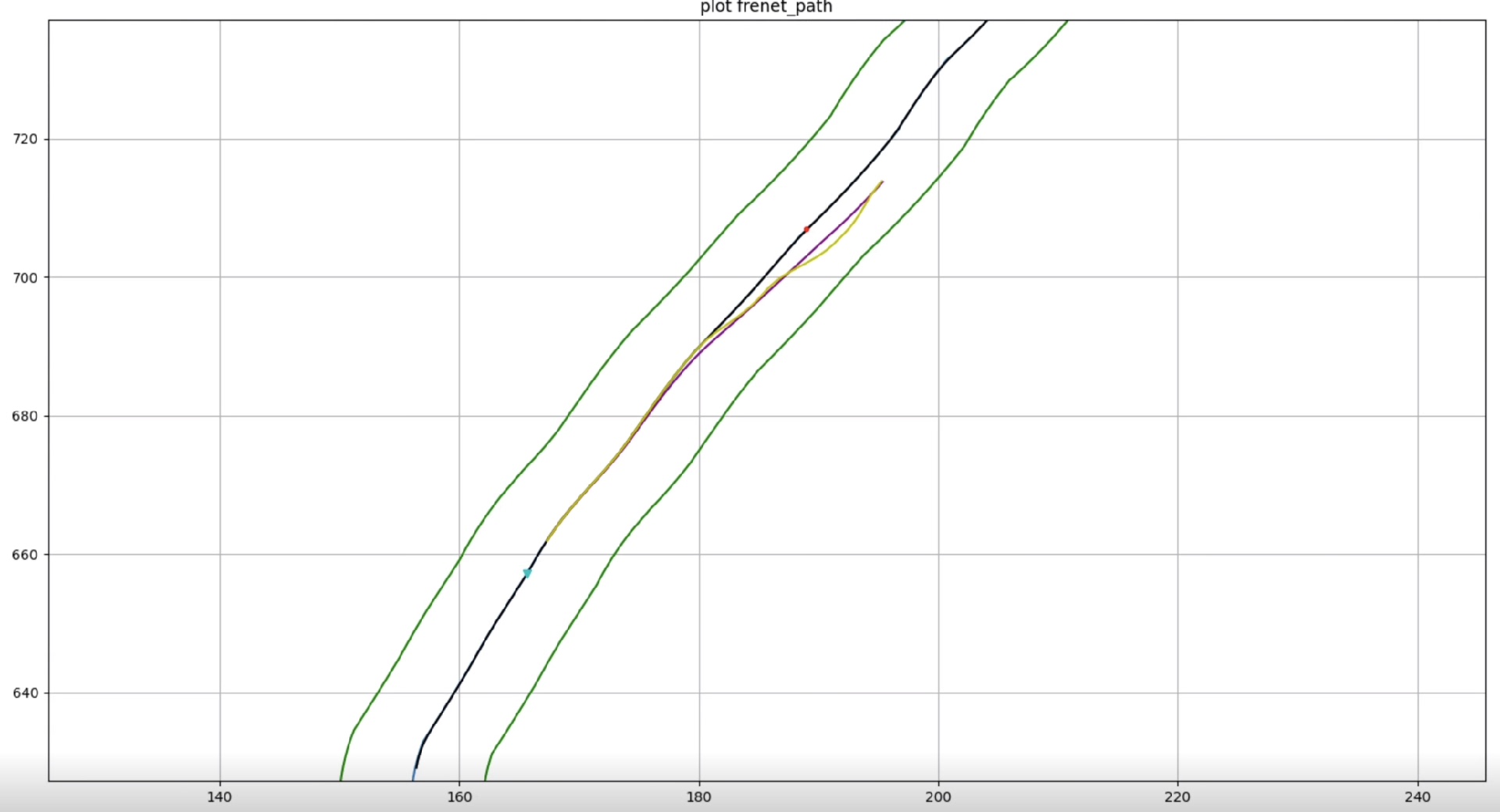
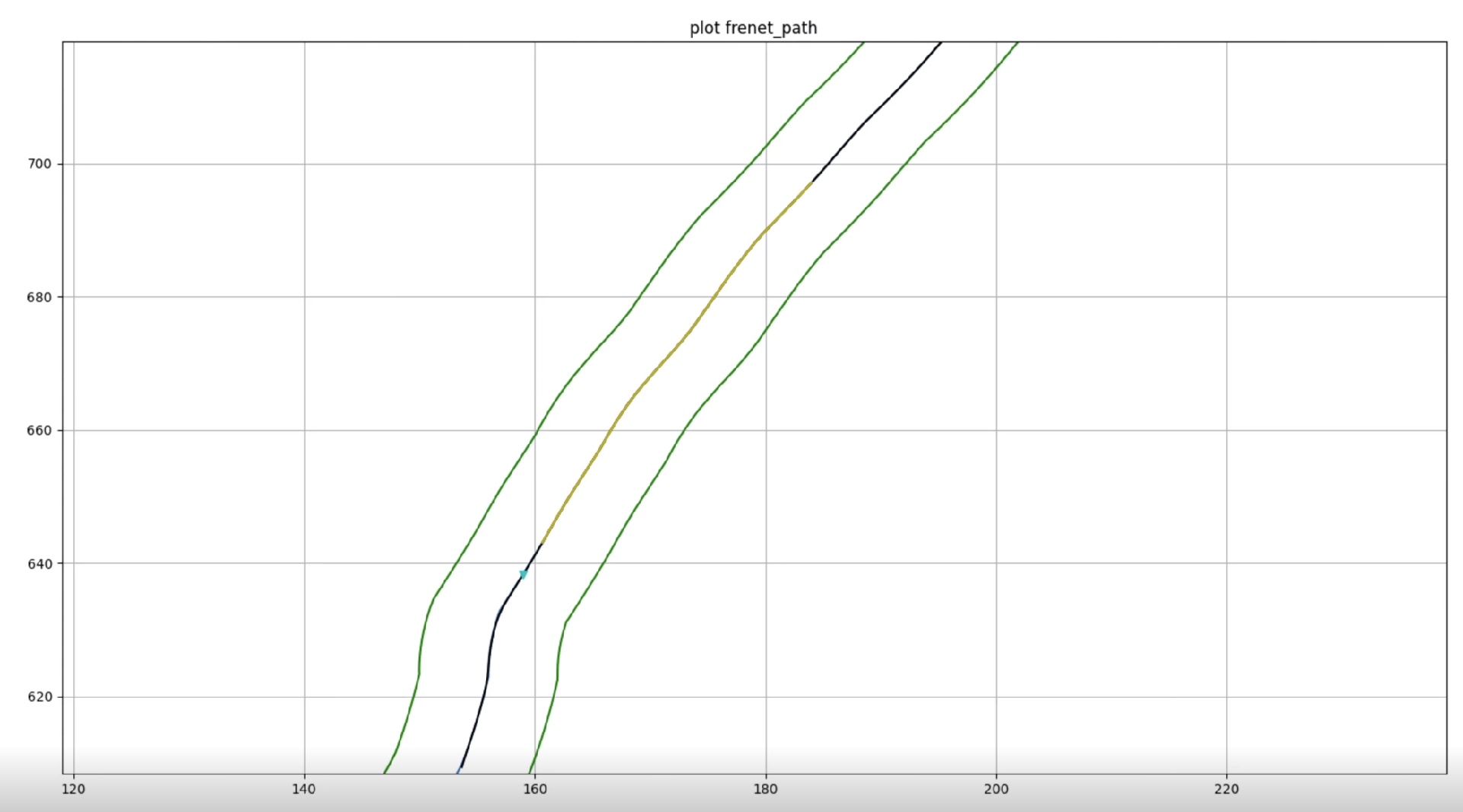
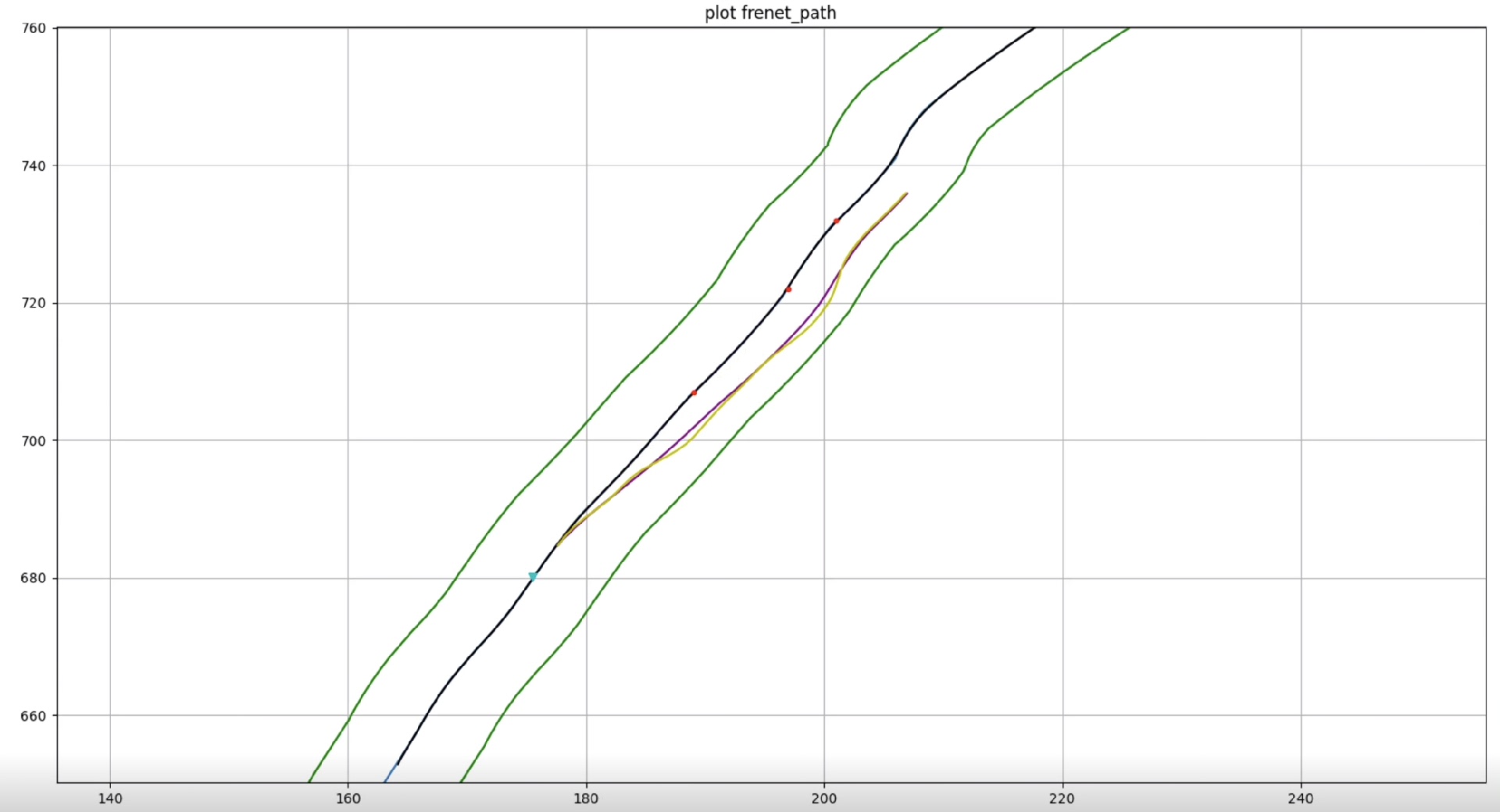
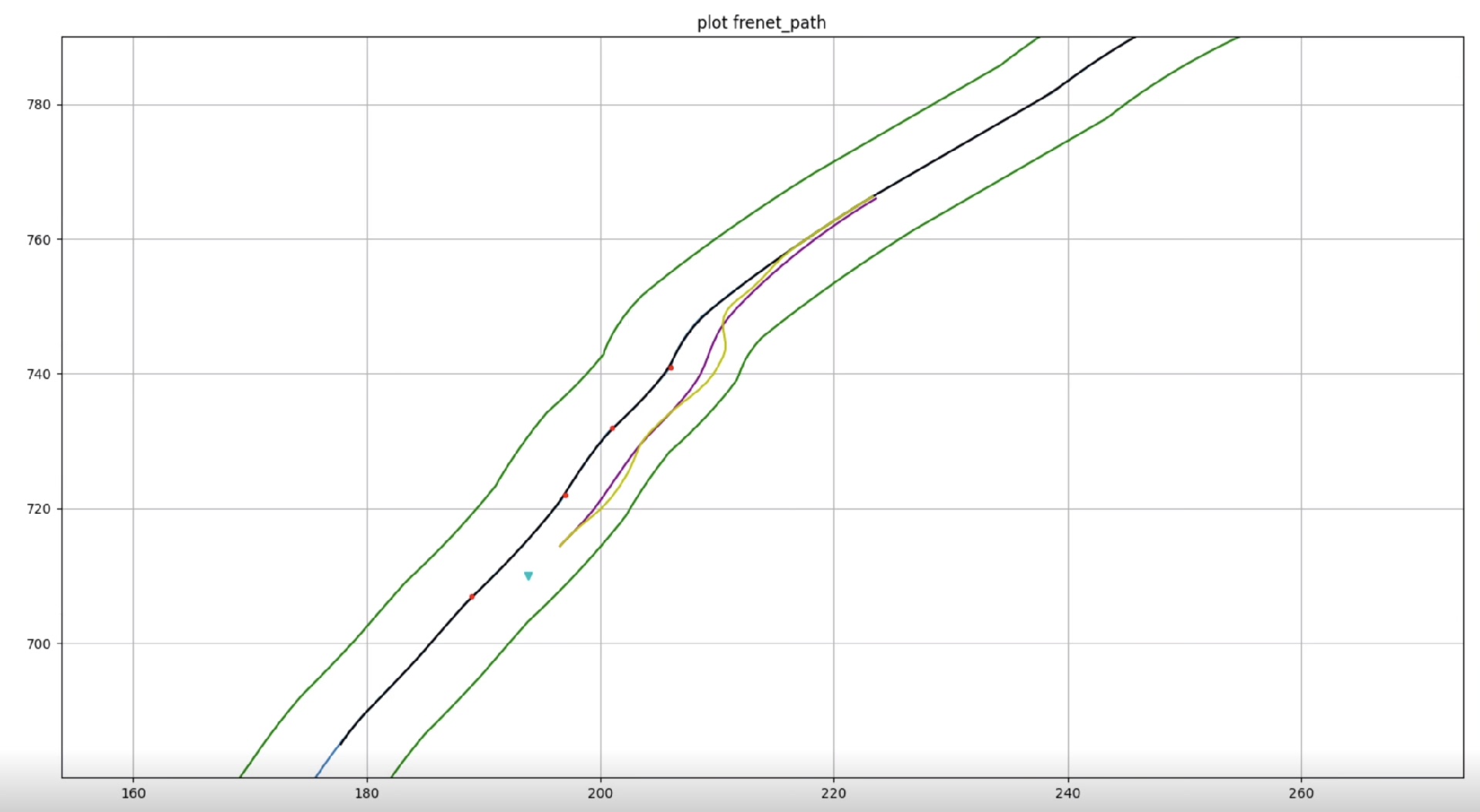
四、画图配置
用matplotlibcpp做可视化(需要安装python2.7):
#include "matplotlibcpp.h"
namespace plt = matplotlibcpp;
void plotPath(const DpPath& dp_path, const QpPath& qp_path) {
std::vector<double> obs_s, obs_l;
// 填充障碍物坐标...
plt::figure_size(800, 600);
plt::plot(dp_path.s, dp_path.l, "r--", {{"label", "DP Path"}});
plt::plot(qp_path.s, qp_path.l, "b-", {{"label", "QP Path"}});
plt::scatter(obs_s, obs_l, 50, {{"color", "g"}, {"label", "Obstacles"}});
plt::xlabel("S (m)");
plt::ylabel("L (m)");
plt::legend();
plt::show();
}这个可视化能直观看到DP的探索过程和QP的平滑效果,适合调试参数。
五、实战要点
- Eigen矩阵操作注意内存对齐,建议使用Eigen::Map转换原生数组
- OSQP的稀疏矩阵填充比较麻烦,建议先在小规模问题上测试
- 横向离散化步长建议0.3-0.5米,太细会大幅增加计算量
- 障碍物膨胀半径至少设为车宽的一半+安全余量
完整代码需要约800行,这里展示核心逻辑。建议从单障碍物场景开始调试,观察代价函数各分量的影响。路径规划不是数学最优解,而是安全性和舒适性的平衡艺术。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)