基于阿克曼转向的车辆运动学模型 在simulink中建立车辆运动学模型,为路径规划奠定基础
最后提醒:保存模型时记得勾选"Export to previous version",否则你的2018b可能打不开同事的模型——别问我是怎么知道的,那是个悲伤的故事。完整的说明文档里需要重点标注各模块的物理含义,毕竟三个月后的自己看到一堆连线时,可能比新手司机第一次上路还懵。当方向盘转动phi角度时,内侧轮要比外侧轮转得更猛——就像冰上芭蕾的双人旋转,内侧舞者需要更大幅度的转身动作。在simuli
基于阿克曼转向的车辆运动学模型 在simulink中建立车辆运动学模型,为路径规划奠定基础,能够更好的检验简化的运动学模型反映运动过程的准确性。 包括:1、simulink仿真验证(版本为2018b) 2、说明文档--详细的建模过程
在玩转自动驾驶算法之前,总得先让虚拟小车跑起来。今天咱们来折腾阿克曼转向的车辆运动学建模,用Simulink给这铁皮家伙注入灵魂。先剧透个小秘密:只要三角函数玩得溜,方向盘转角就能变成车轮轨迹的魔法开关。
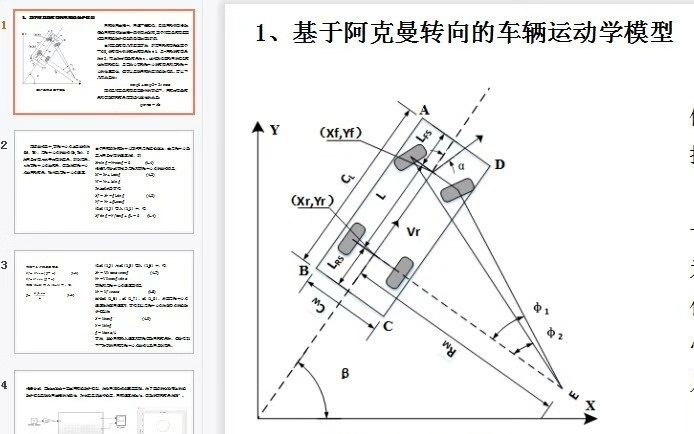
先看阿克曼几何的核心公式(别急着关页面,这公式比女朋友的心思好懂):
function delta = calculateAckermann(phi, L, W)
% phi:方向盘转角
% L:轴距
% W:轮距
R = L / tan(phi);
delta_i = atan(L/(R - W/2));
delta_o = atan(L/(R + W/2));
delta = [delta_o, delta_i]; % 输出左右轮转角
end这代码块相当于车辆的机械神经系统。当方向盘转动phi角度时,内侧轮要比外侧轮转得更猛——就像冰上芭蕾的双人旋转,内侧舞者需要更大幅度的转身动作。参数L和W分别对应车辆的轴距和轮距,直接影响了转弯半径。
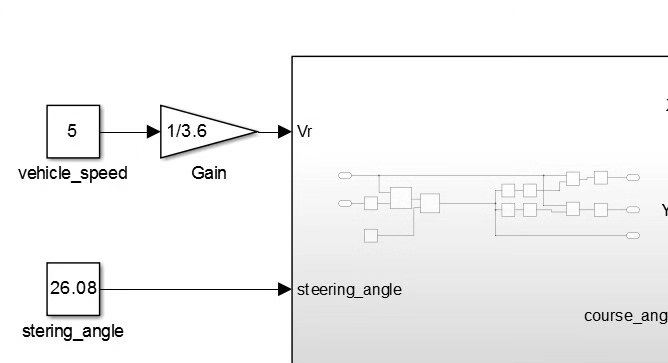
在Simulink 2018b里搭建模型时,记得把采样时间设为0.01秒(别问为什么,问就是玄学经验)。运动学模型的核心是位姿更新方程:
x(k+1) = x(k) + v*cos(theta(k))*dt
y(k+1) = y(k) + v*sin(theta(k))*dt
theta(k+1) = theta(k) + (v/L)*tan(phi(k))*dt这几个离散方程用S-Function实现效果最佳。注意这里用了小角度假设,就像用直线近似钟摆轨迹——虽然不够精确,但对路径规划来说够用了。
建模时最容易翻车的地方是单位统一。有个惨痛教训:某次把方向盘的弧度当角度输入,结果车辆在仿真里跳起了街舞。建议在模型里加上单位转换模块,就像给不同国家的插头配转换器。
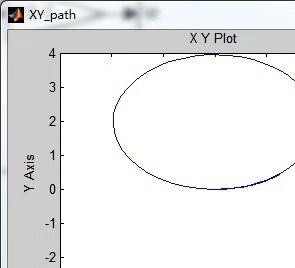
验证环节可以玩点花的:让车辆走8字轨迹。当看到仿真曲线像德芙巧克力般丝滑时,说明阿克曼转向模型开始靠谱了。这时候该打开MATLAB Animation Viewer,看着小车在屏幕上蛇形走位,成就感堪比在《欧洲卡车模拟》里完成高难度倒车。
最后提醒:保存模型时记得勾选"Export to previous version",否则你的2018b可能打不开同事的模型——别问我是怎么知道的,那是个悲伤的故事。完整的说明文档里需要重点标注各模块的物理含义,毕竟三个月后的自己看到一堆连线时,可能比新手司机第一次上路还懵。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 1
1 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)