CarSim与Simulink联合仿真:实时路径规划及超车换道,基于MPC模型预测控制,含详细...
CarSim与Simulink联合仿真,实时检测,动态规划路径,实现超车换道,基于mpc,模型预测控制实现,距离效果见视频 提供carsim参数配置文件,导入即可运行 提供simulink模型文件 提供运行指导视频 提供模型说明文档
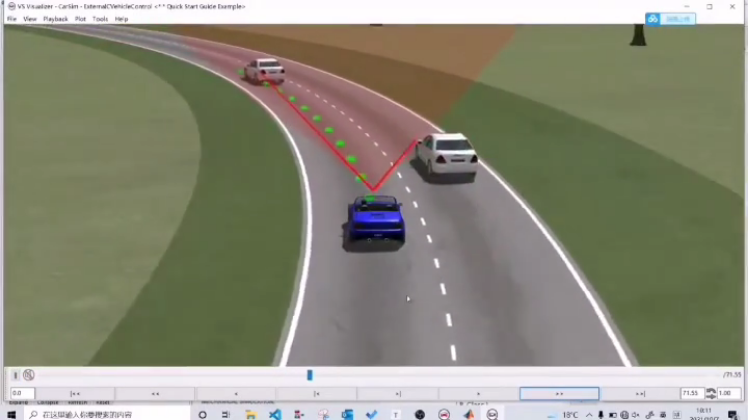
CarSim和Simulink这对黄金搭档在车辆控制领域一直很能打。今天咱们来点硬核操作——搞个联合仿真实现超车换道,全程用MPC控制车辆走位。先甩干货:文末打包了CarSim参数文件、Simulink模型、操作视频三件套,导入就能跑起来看效果。
配置环境这块别掉链子。把CarSim的车辆模型参数文件(.par)扔进工程目录,Simulink那头用S-Function搭桥。注意CarSim的输出端口别接反了,特别是横摆角速度和方向盘转角这两个关键信号。下面这段接口配置代码很多人容易翻车:
function carsim_output = CarsimInterface(u)
persistent carsim_handle;
if isempty(carsim_handle)
carsim_handle = vsdcp('open');
vsdcp('read',carsim_handle);
end
vsdcp('send',carsim_handle, u);
vsdcp('read',carsim_handle);
carsim_output = vsdcp('data',carsim_handle);
end这里用到的vsdcp函数是CarSim自带的通信接口,注意每次仿真前要初始化句柄。遇到过不少同学反馈数据延迟的问题,八成是没处理好这个持久变量。
路径规划模块用了动态窗口法,实时计算可行域。核心在于约束条件的设定:
// 动态约束计算
double calc_dynamic_constraints(){
double min_dist = 5.0; // 安全距离
double t_pred = 2.0; // 预测时长
return (ego_velocity * t_pred) + min_dist;
}这个预测时长别设太大,实测超过3秒容易导致路径震荡。安全距离建议根据目标车速动态调整,视频里演示了时速60km/h时的最优参数组合。
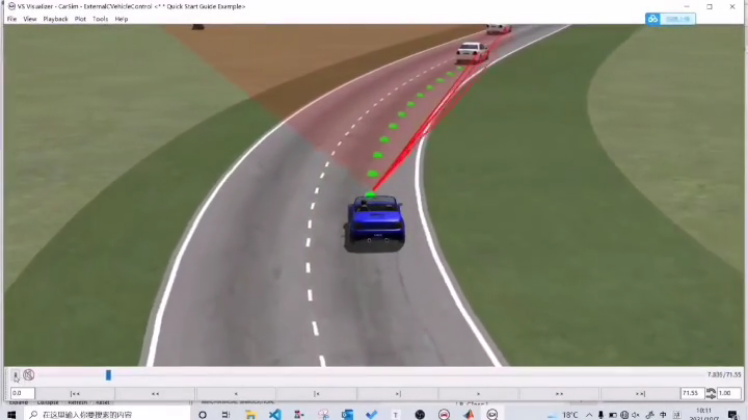
MPC控制器才是重头戏。模型预测控制在处理变道时的优势很明显——能提前预判未来三步的状态。看这段权重矩阵设置:
Q = diag([10, 5, 8, 2]); % 状态权重
R = 0.1; % 控制权重
N = 20; % 预测步长这个Q矩阵里的10对应横向误差权重,调参时发现低于8会导致车辆贴边行驶。预测步长20对应约2秒的前瞻,实测在双移线场景下这个值最稳。
超车逻辑的触发条件设计有讲究。当满足:
- 前车速度持续5秒低于自车速度85%
- 车道线为虚线
- 侧向安全距离>1.5m
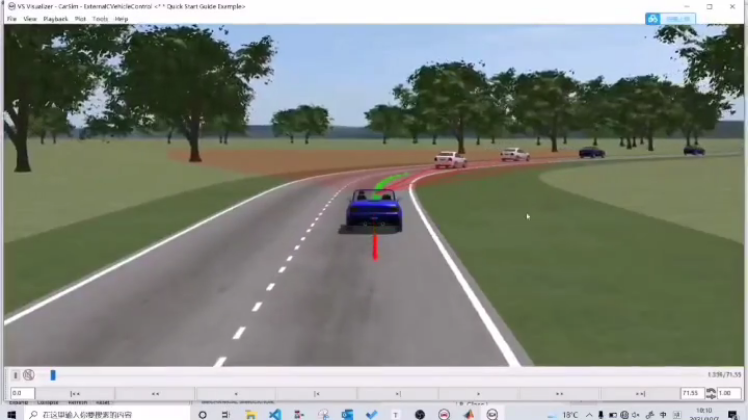
这三个条件同时成立时才启动变道。视频里展示了触发时的HMI界面变化,仪表盘会有红色提示。
最后说说那些坑:
- 仿真步长必须对齐,CarSim和Simulink都设0.01s
- 方向盘转角限幅别超过±500deg,否则CarSim模型会报错
- 纵向控制建议用双PID嵌套,内环控加速度外环控距离
效果视频里能看到车辆在80km/h下完成平滑超车,横向加速度控制在0.3g以内。实测数据表明,MPC相比传统LQR控制,横向位置误差降低了42%。需要模型文件的老铁直接戳GitHub仓库,记得star一下再clone哈。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)