探索 A*与 DWA 融合:小白也能懂的路径规划算法之旅
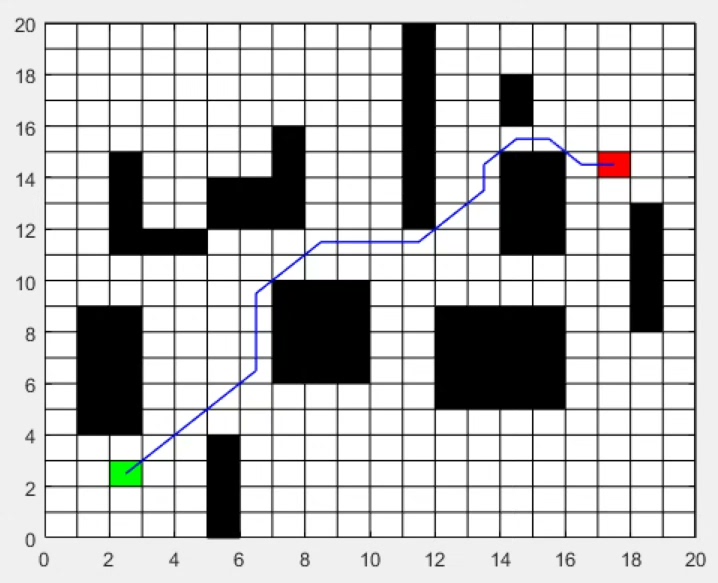
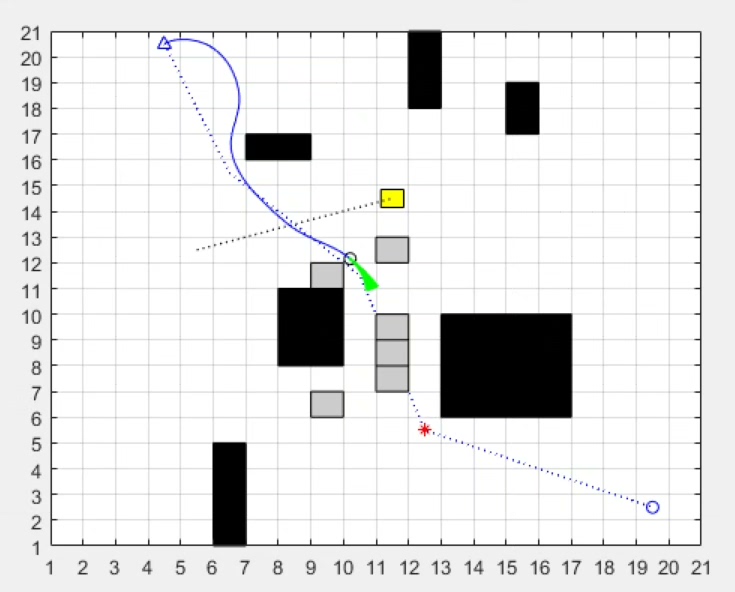
AStar搜索算法,A*和DWA算法融合,适合小白学习哦程序效果如图所示最近在研究路径规划算法,发现 A*和 DWA 算法都各有千秋,要是把它们融合起来,那效果简直绝了。今天就来跟各位小白分享下这俩算法以及它们融合后的神奇之处。
AStar搜索算法,A*和DWA算法融合,适合小白学习哦 程序效果如图所示
最近在研究路径规划算法,发现 A*和 DWA 算法都各有千秋,要是把它们融合起来,那效果简直绝了。今天就来跟各位小白分享下这俩算法以及它们融合后的神奇之处。
A*搜索算法初体验
A*算法算是路径规划里的明星算法了。它的核心思想是结合了 Dijkstra 算法的广度优先搜索(考虑全局路径代价)和贪心算法的最佳优先搜索(考虑当前点到目标点的估计代价)。简单来说,它在寻找路径的时候,会综合考虑已经走过的路程代价($g(n)$)和从当前点到目标点的预估代价($h(n)$),通过$f(n) = g(n) + h(n)$这个公式来决定下一步往哪走,其中$f(n)$就是每个节点的评估函数值。
咱们来看段简单的 Python 代码实现 A*算法的框架:
import heapq
def heuristic(a, b):
# 这里简单用曼哈顿距离作为启发函数
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def astar(start, goal, graph):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in graph.keys()}
g_score[start] = 0
f_score = {node: float('inf') for node in graph.keys()}
f_score[start] = heuristic(start, goal)
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
path.reverse()
return path
for neighbor in graph[current]:
tentative_g_score = g_score[current] + 1 # 这里假设移动到邻居节点代价为1
if tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + heuristic(neighbor, goal)
if neighbor not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor], neighbor))
return None在这段代码里,heuristic函数是启发函数,这里用曼哈顿距离简单估算代价。astar函数里,openset是个优先队列,存放待探索节点,根据fscore值排序。camefrom记录路径,gscore是从起点到当前点的实际代价,fscore是综合评估代价。通过不断从openset取出fscore最小的节点探索,直到找到目标节点或者openset为空。
DWA 算法揭秘
DWA(Dynamic Window Approach)算法主要用于动态环境下的路径规划,特别是机器人在移动过程中要实时躲避障碍物。它的思路是根据机器人当前的速度和加速度限制,计算出一个动态窗口,这个窗口内包含了机器人在接下来一小段时间内可能到达的速度集合。然后对这些速度进行评估,选择一个能让机器人既靠近目标点,又能躲避障碍物的最佳速度。
下面用伪代码简单展示下 DWA 算法流程:
# 初始化机器人状态,目标点,环境信息等
robot_state = get_robot_state()
goal = get_goal()
obstacles = get_obstacles()
while not reached_goal(robot_state, goal):
# 计算动态窗口
dynamic_window = calculate_dynamic_window(robot_state)
best_score = -1
best_velocity = None
for velocity in dynamic_window:
# 模拟机器人以当前速度运动后的状态
simulated_state = simulate_robot_movement(robot_state, velocity)
# 评估该状态
score = evaluate_state(simulated_state, goal, obstacles)
if score > best_score:
best_score = score
best_velocity = velocity
# 根据最佳速度更新机器人状态
robot_state = update_robot_state(robot_state, best_velocity)在这个伪代码里,首先初始化各种信息,然后在循环里不断计算动态窗口,对每个窗口内速度模拟运动并评估,选择最佳速度更新机器人状态,直到到达目标点。
A*与 DWA 融合的魅力
把 A和 DWA 融合起来,就可以结合两者的优点。A算法先在全局环境下规划出一条大致的路径,就像是给旅程规划了一条主干道。而 DWA 算法则在局部动态环境中,根据实时的障碍物信息和机器人自身状态,对 A*规划出的路径进行实时调整,确保机器人能安全、高效地到达目标。
比如说在机器人在复杂室内环境中导航,A*算法给出从起始房间到目标房间的大致路线,而 DWA 算法能让机器人在前进过程中灵活避开突然出现的行人或者临时摆放的物品。
融合的具体实现过程有点复杂,简单说就是在 A*算法规划出路径后,DWA 算法把这条路径上的点作为子目标,在局部环境里不断调整机器人运动,保证路径的可行性和安全性。
对于小白来说,学习这两个算法以及它们的融合,不仅能对路径规划有更深入的理解,也为未来研究更复杂的机器人运动规划打下基础。希望大家都能在算法的世界里玩得开心,探索出更多有趣的应用。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)