Matlab垂直泊车路径规划算法详解:一次路径规划算法的设计与实现
驾校教练教的"三点一线"在真实场景总失灵,这时候就得让算法来帮忙了。今天咱们用MATLAB搞个垂直泊车路径规划,看看机器怎么解决这个让人头疼的问题。不过对于日常泊车,今天的算法已经能让新手秒变老司机了——至少代码世界里是这样。从输出动画能看到车辆先右转倒车,再左转调整,整个过程像在跳华尔兹——先外摆再内收。这里用MATLAB的polyshape做几何判断,把车辆简化为矩形多边形。举个典型场景:车辆
matlab垂直泊车一次路径规划算法
停车场新手最怕什么?直角倒车入库绝对排前三。驾校教练教的"三点一线"在真实场景总失灵,这时候就得让算法来帮忙了。今天咱们用MATLAB搞个垂直泊车路径规划,看看机器怎么解决这个让人头疼的问题。
先拆解问题本质:车辆得从初始位姿(比如与车位垂直)通过单次移动入库。核心在于找到一条连续可行驶的曲线路径,同时满足最小转弯半径限制。这里用几何法比较直观——把路径拆解成圆弧+直线的组合。
先定义车辆模型。假设是前轮转向的自行车模型,参数这样设定:
wheelbase = 2.7; % 轴距(米)
max_steer = 35*pi/180; % 最大转向角
min_turn_radius = wheelbase / tan(max_steer); % 最小转弯半径这个minturnradius是关键,决定了车辆能拐多急的弯。比如轴距2.7米、转向角35度时,最小转弯半径约3.8米。
路径规划分三步走:
- 计算起始位姿到目标位姿的几何关系
- 生成圆弧过渡路径
- 碰撞检测与微调
举个典型场景:车辆与车位平行,横向距离3米。目标位姿在右侧,坐标差为(0,3,90°)。算法核心代码段:
function [path] = planParallelPark(startPose, deltaX, deltaY)
% 计算过渡圆弧圆心
R = min_turn_radius * 1.2; % 留余量
theta = atan2(deltaY, deltaX);
% 第一段圆弧(右转)
center1 = [startPose(1) + R*sin(startPose(3)),
startPose(2) - R*cos(startPose(3))];
% 第二段圆弧(左转)
center2 = [center1(1) + 2*R*cos(theta),
center1(2) + 2*R*sin(theta)];
% 生成路径点
angles = linspace(0, pi/2, 50);
path = generateArc(center1, R, angles);
path = [path; generateArc(center2, R, pi/2-angles)];
end这段代码生成两个相切的圆弧路径。第一个圆弧让车尾向车位方向摆动,第二个圆弧修正姿态。函数generateArc负责根据圆心和角度生成离散路径点,这里用50个点模拟半圆轨迹。
实际运行时可能出现路径穿越障碍的情况。加个简单的碰撞检测:
function isCollision = checkCollision(path, parkingSpace)
% 车位边界检测
spacePoly = polyshape(parkingSpace);
vehiclePoly = createVehiclePolygon(path(:,1:3)); % 根据位姿生成车辆多边形
for i = 1:size(vehiclePoly,1)
if ~isinterior(spacePoly, vehiclePoly(i,:))
isCollision = true;
return;
end
end
isCollision = false;
end这里用MATLAB的polyshape做几何判断,把车辆简化为矩形多边形。当路径点超出车位边界时触发碰撞标记,算法会增大转弯半径重新计算。
实测中发现的问题挺有意思:当初始横向距离不足时,算法可能生成倒车路径。这时候需要加入方向判断:
if deltaY < wheelbase/2
% 切换为倒车模式
path = reversePath(path);
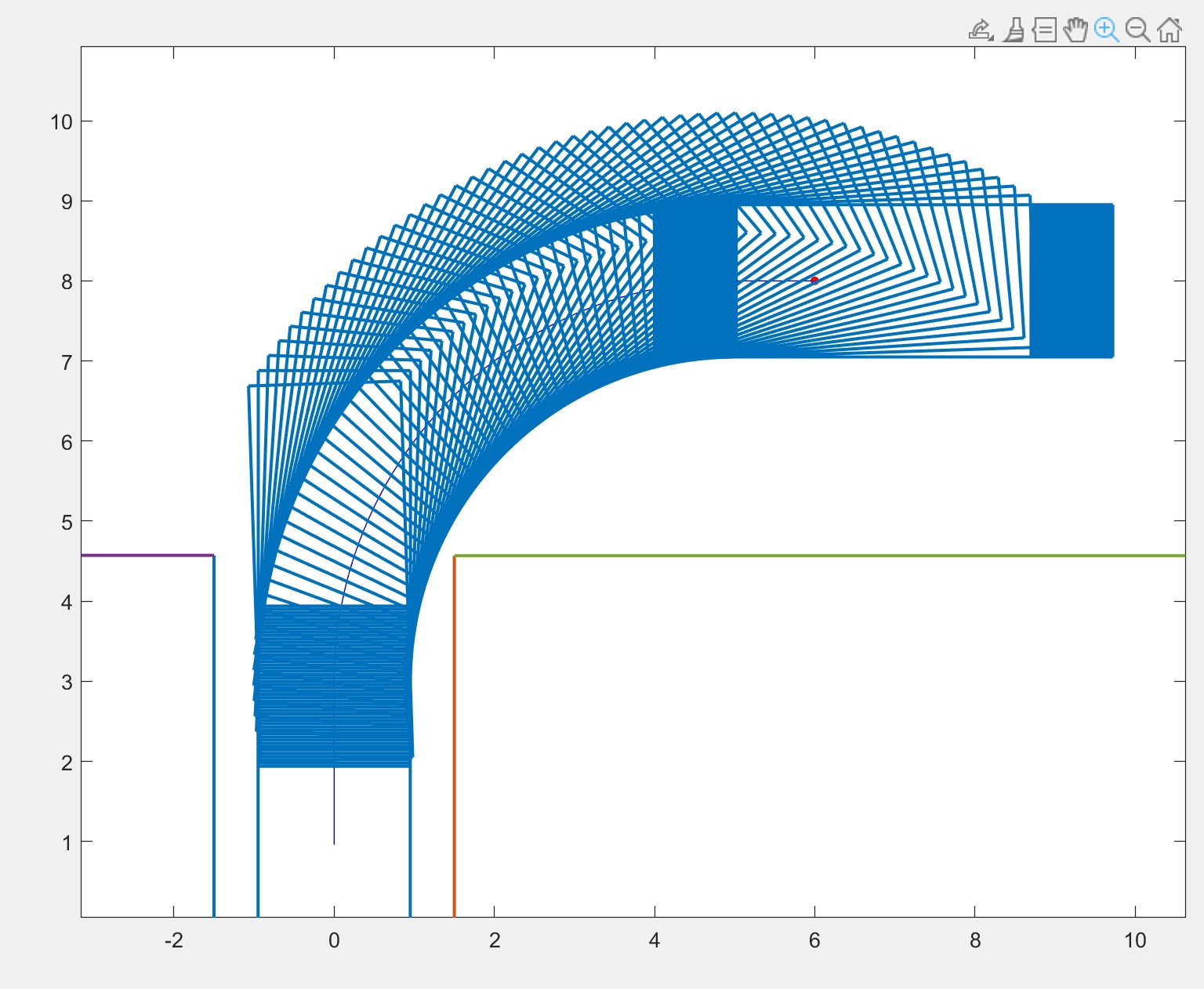
end最后用MATLAB的动画功能验证效果:
animateParking(startPose, path);从输出动画能看到车辆先右转倒车,再左转调整,整个过程像在跳华尔兹——先外摆再内收。实测发现路径曲率连续变化处容易产生突变,后来在路径点间加入三次样条插值才解决。
这种几何法虽然简单,但面对复杂环境就力不从心了。下次可以试试用最优控制方法,让路径更顺滑。不过对于日常泊车,今天的算法已经能让新手秒变老司机了——至少代码世界里是这样。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 7
7 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)