实战教程:PX4_QGC_FastLio_Tare 仿真系统完整运行流程
本文聚焦 PX4+QGC+FastLIO+Tare Planner 无人机仿真系统,极简拆解从环境启动到自主飞行的全流程。涵盖 PX4 仿真环境配置、FastLIO 激光 SLAM 建图、Tare Planner 路径规划核心指令,配套 QGC 地面站关键参数(EKF2 视觉融合)配置截图,以及 Offboard 模式切换、无人机解锁飞行等实操步骤,核心注意点同步标注,新手可快速复现整套仿真流程,
在无人机自主导航与 SLAM 仿真领域,PX4+FastLIO+Tare Planner 的组合是验证算法、调试系统的经典方案。本文将从环境启动、参数配置到实操飞行,全程拆解该仿真系统的运行流程,附带关键配置截图与实操指令,助力开发者快速复现整套流程。
一、系统运行整体流程概述
整套仿真系统的核心逻辑是:通过 PX4 搭建无人机仿真环境,FastLIO 完成激光 SLAM 建图,Tare Planner 实现路径规划,QGC 负责飞控参数配置与飞行控制,最终通过格式转换程序打通各模块数据交互,实现无人机自主飞行仿真。
二、分步实操指南
1. 启动 PX4 仿真环境
PX4 是无人机飞控核心,首先需完成环境初始化与仿真核心启动:
cd ~/px4_ws
source devel/setup.bash
cd src/PX4/PX4-Autopilot
# 配置Gazebo环境变量(关键:保证仿真场景加载路径正确)
source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/sitl_gazebo
# 启动PX4核心仿真(含Gazebo场景与Mavros通信)
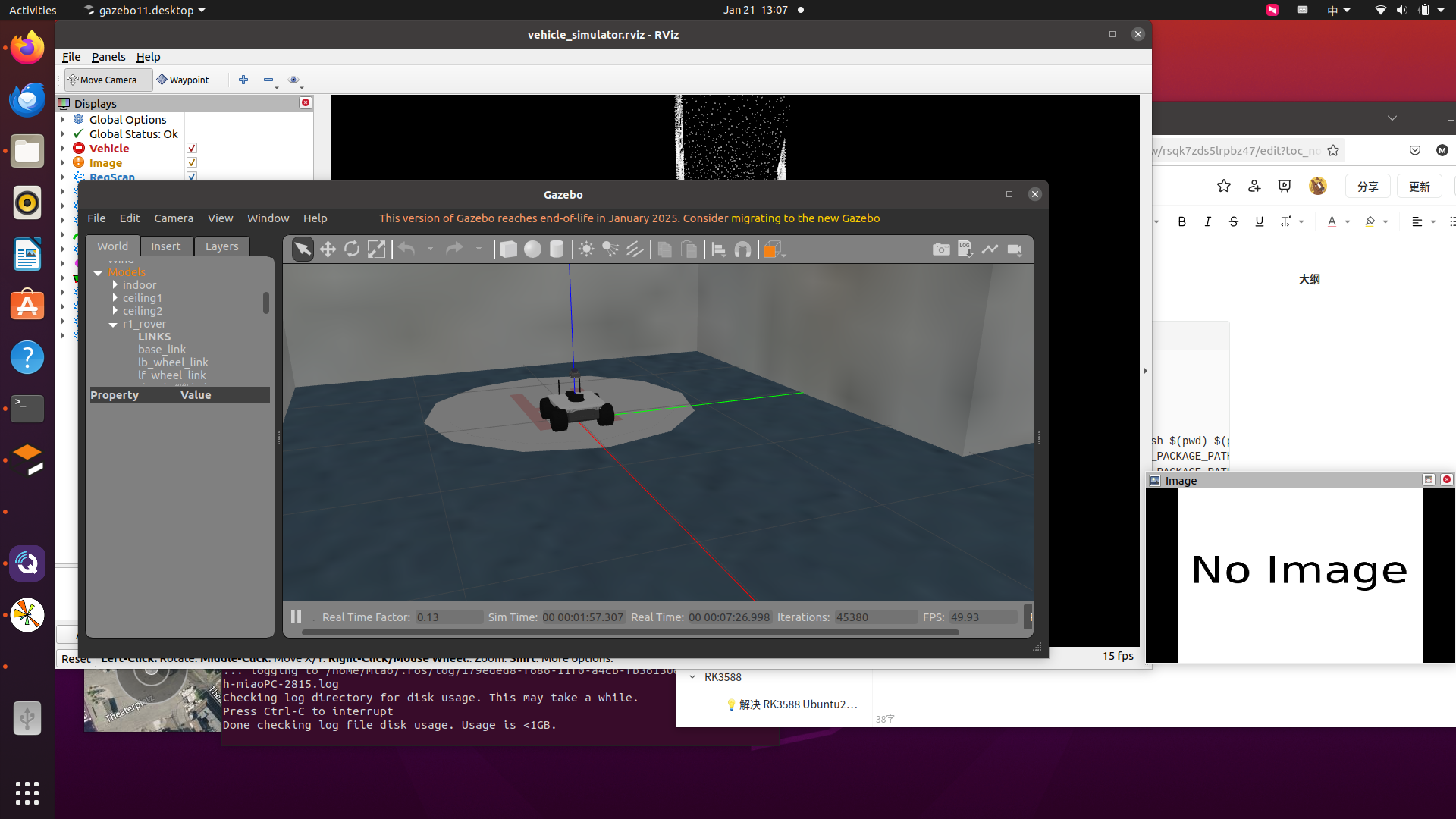
roslaunch px4 mavros_posix_sitl.launch启动后 Gazebo 仿真界面如下,可看到实时仿真时间、帧率等关键状态(注:该版本 Gazebo 将于 2025 年 1 月停止维护,可考虑迁移至新版 Gazebo):
2. 运行 FastLIO 激光 SLAM
FastLIO 是轻量高效的激光惯性里程计,负责实时建图,启动指令如下:
cd ~/px4_ws
source devel/setup.bash
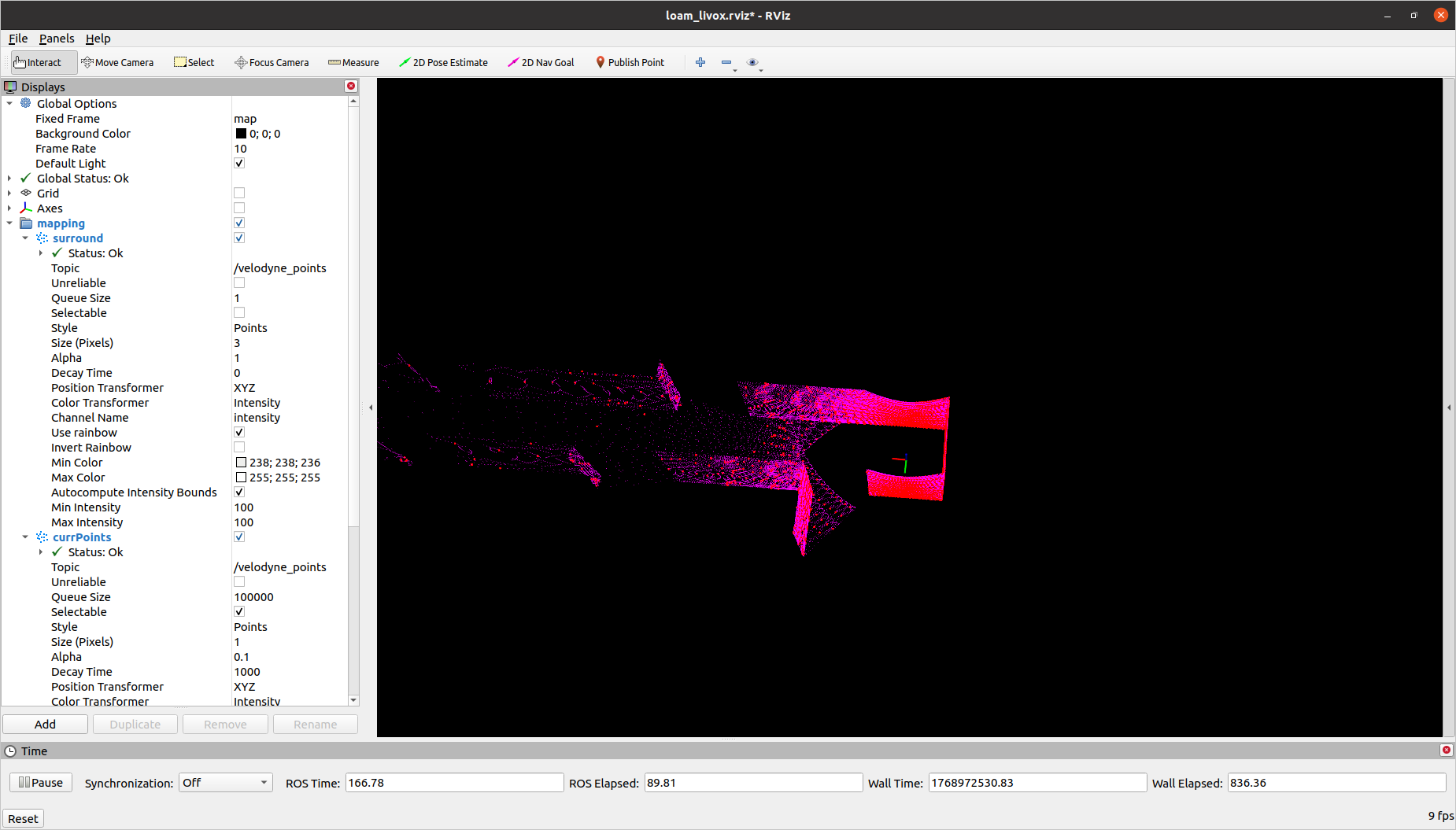
roslaunch fast_lio mapping_mid360.launch启动后 RVIZ 可视化界面可查看激光点云与建图状态,关键需关注/VELODYNE_POINTS话题的可靠性与点云参数配置:
3. 启动 Tare Planner 路径规划器
Tare Planner 负责无人机自主路径规划,启动指令简洁,需确保 ROS 环境已正确加载:
source devel/setup.bash
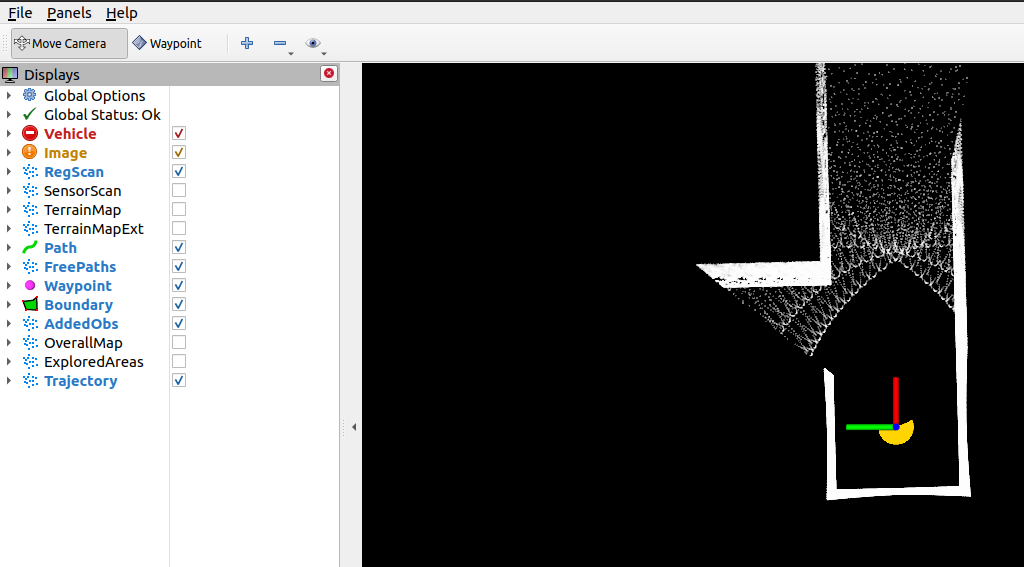
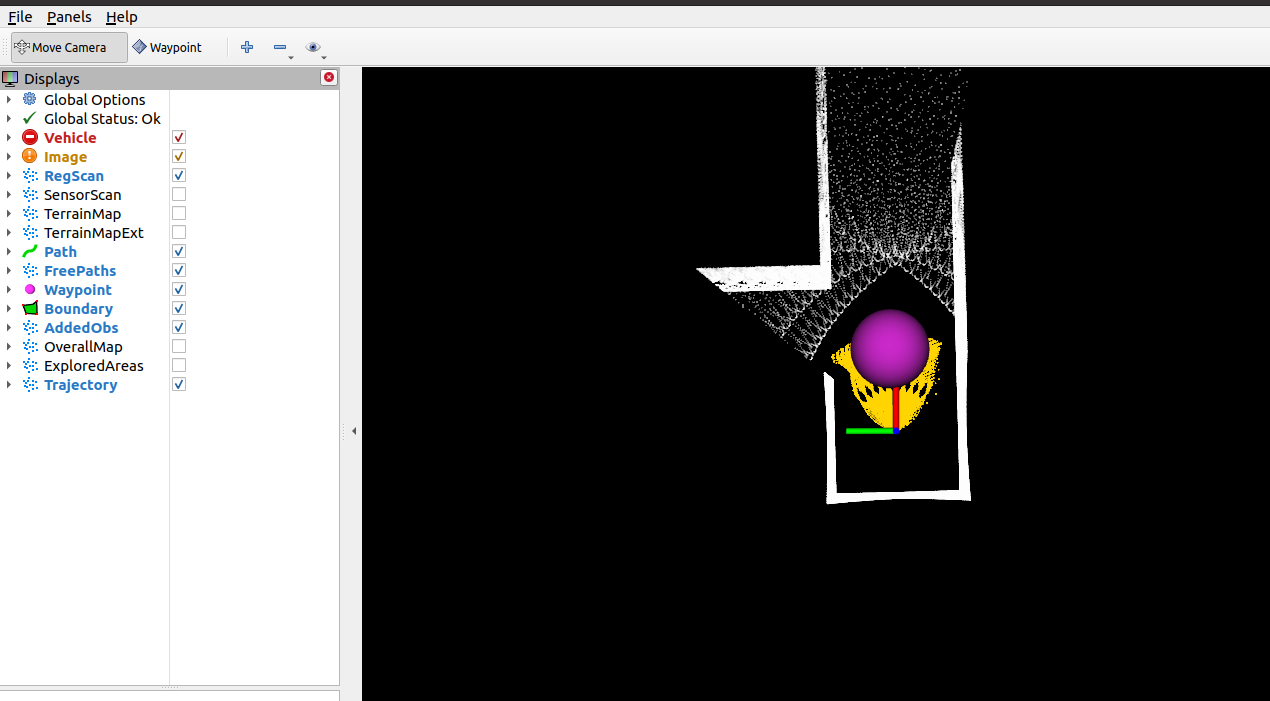
roslaunch vehicle_simulator system_indoor.launch启动后可视化界面可查看规划路径、地形地图、探索区域等核心信息:
4. QGC 地面站配置与运行
QGroundControl(QGC)是 PX4 标配地面站,负责飞控参数配置、状态监控与飞行控制。
4.1 启动 QGC
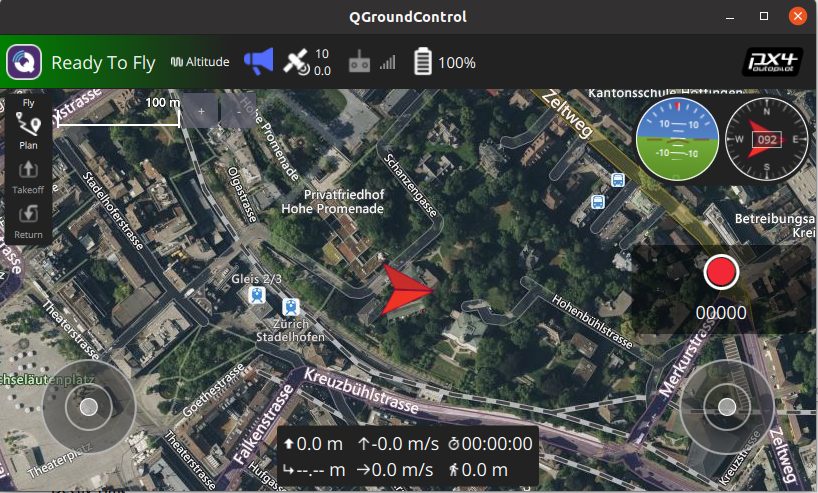
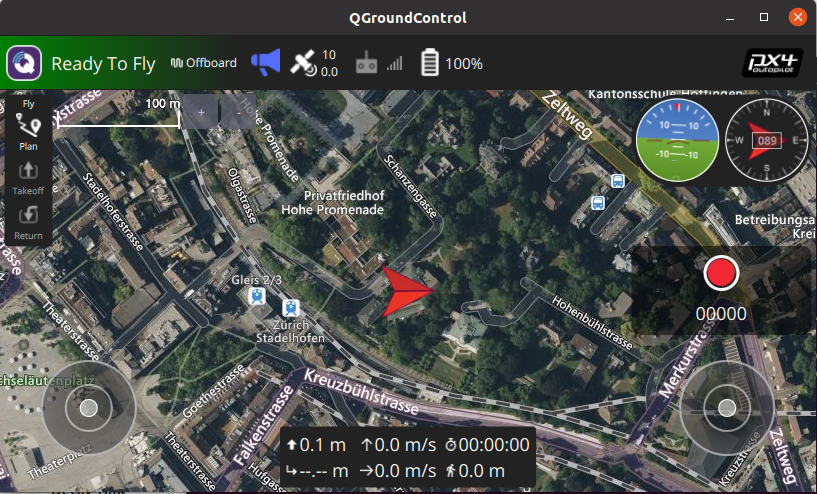
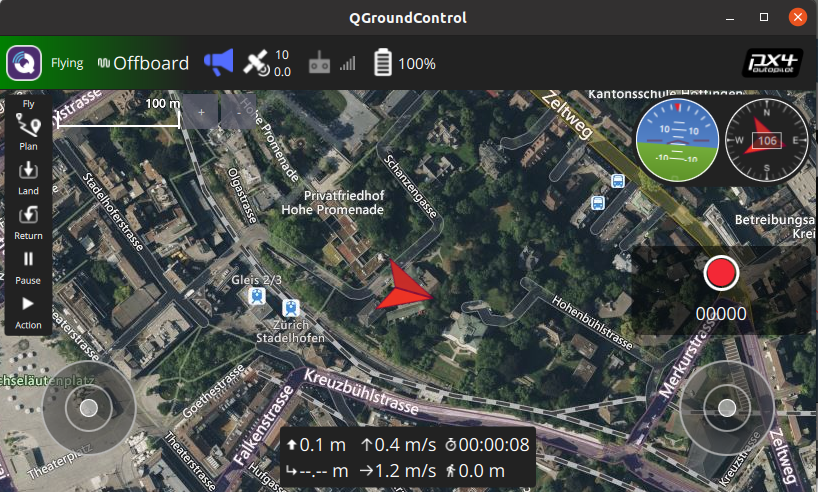
直接点击系统中QGroundControl.AppImage文件运行,启动后初始界面如下:
初始界面可查看无人机位置、高度、飞行模式等基础状态:
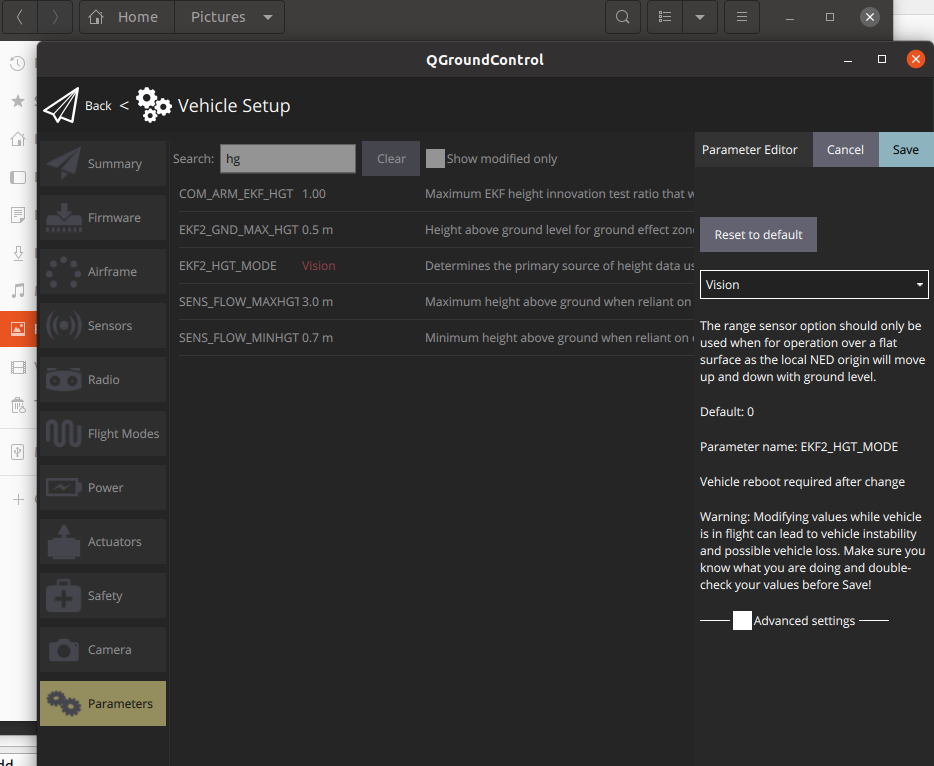
4.2 EKF2 高度融合配置(关键)
为提升定位精度,需将 EKF2 高度数据源配置为视觉(Vision)融合,路径:Vehicle Setup -> Parameter Editor -> 搜索EKF2_HGT_MODE,设置为 Vision 模式(修改后需重启无人机生效):
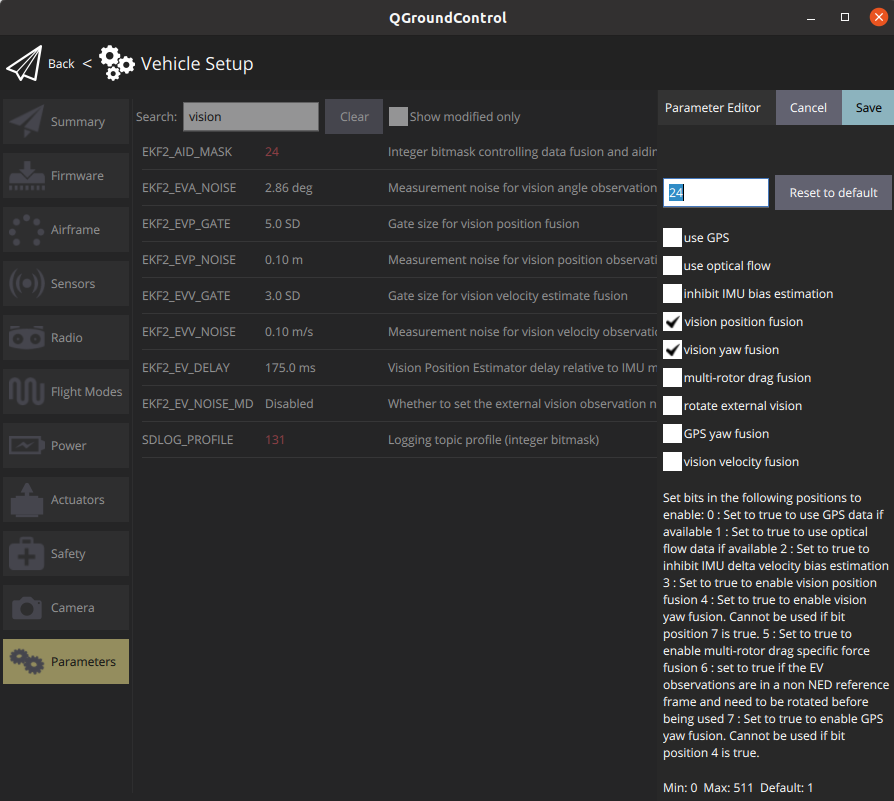
4.3 EKF2 辅助融合模式配置
EKF2_AID_MASK 是多源数据融合的核心掩码参数,需根据需求开启视觉位置 / 速度 / 偏航融合等功能(比特位定义见界面注释),关键参数如视觉位置噪声、速度噪声等需合理配置:
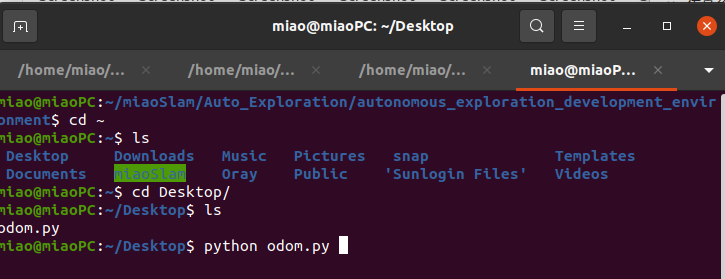
5. 运行 Tare 格式转 Mavros 数据转换程序
Tare Planner 输出的路径格式需转换为 Mavros 可识别的格式,通过 Python 脚本完成:
python odom.py脚本运行目录示例(需确保odom.py文件存在于当前目录):
6. Offboard 模式配置与飞行实操
6.1 配置 Offboard 模式
在 QGC 界面切换飞行模式为 Offboard(自主控制模式),确认模式切换成功:
6.2 Tare Planner 发送目标点
在 Tare Planner 界面配置并发送规划目标点,界面可实时查看路径与目标点状态:
6.3 QGC 解锁无人机
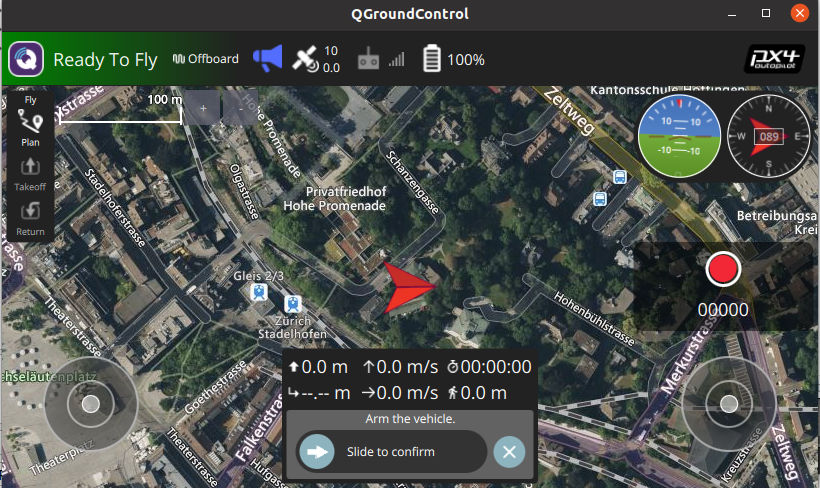
在 QGC 界面完成无人机解锁(需滑动确认),解锁前需检查传感器状态(磁力计、气压计、RC 接收机等)是否正常:
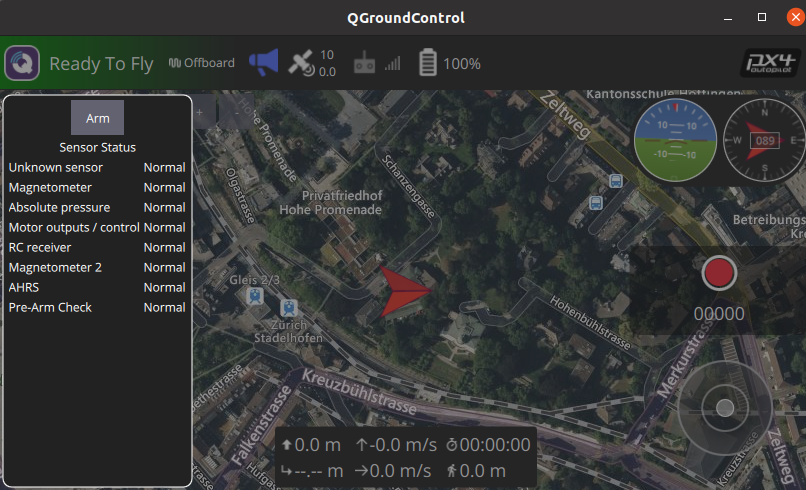
解锁确认界面:
6.4 无人机自主飞行
解锁后无人机将按照 Tare Planner 规划的路径飞行,QGC 界面可实时查看飞行高度、速度、状态等:
三、关键注意事项
- 环境依赖:所有操作需确保 ROS 环境正确加载(
source devel/setup.bash),Gazebo 与 PX4 版本兼容; - 参数生效:EKF2 相关参数修改后需重启 PX4 仿真,否则配置不生效;
- 话题通信:需确保各模块间 ROS 话题通信正常(如 FastLIO 的
/VELODYNE_POINTS、Mavros 的/mavros/odometry/out等); - 解锁前提:Offboard 模式下解锁无人机前,需确保 Tare Planner 已发送目标点,否则可能解锁失败。
总结
本文完整拆解了 PX4_QGC_FastLio_Tare 仿真系统的运行流程,从环境启动、SLAM 建图、路径规划到参数配置与飞行实操,覆盖核心指令与关键配置点。该流程可作为无人机自主导航仿真的基础框架,开发者可基于此扩展算法验证、场景适配等进阶功能。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 24
24 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)