MASt3R-Fusion:集成前馈视觉模型与IMU、GNSS的高功能SLAM
网络输出缺乏绝对尺度,必须优化两帧间的相似变换SjisRt01SjisR0t1。
Slide 1: 研究背景与动机 (Motivation)
传统Visual SLAM的困境
稀疏特征法 (ORB-SLAM): 在低纹理、强光照变化场景下易跟踪失败。
纯视觉缺陷: 存在尺度模糊 (Scale Ambiguity),无法感知绝对物理尺度。
深度学习SLAM (Deep SLAM)的兴起与不足
优势: 前馈模型 (如 DUSt3R, MASt3R) 能直接回归稠密3D结构,具有强大的几何先验。
不足: 往往忽略多传感器融合 (IMU/GNSS) 的概率优势;难以保证全局一致性。
本文核心目标
紧耦合 (Tightly-coupled): 将前馈视觉模型的Sim(3)输出与IMU的SE(3)测量紧密融合。
数学统一: 提出同构群变换 (Isomorphic Group Transformation) 解决不同李群空间的融合问题。
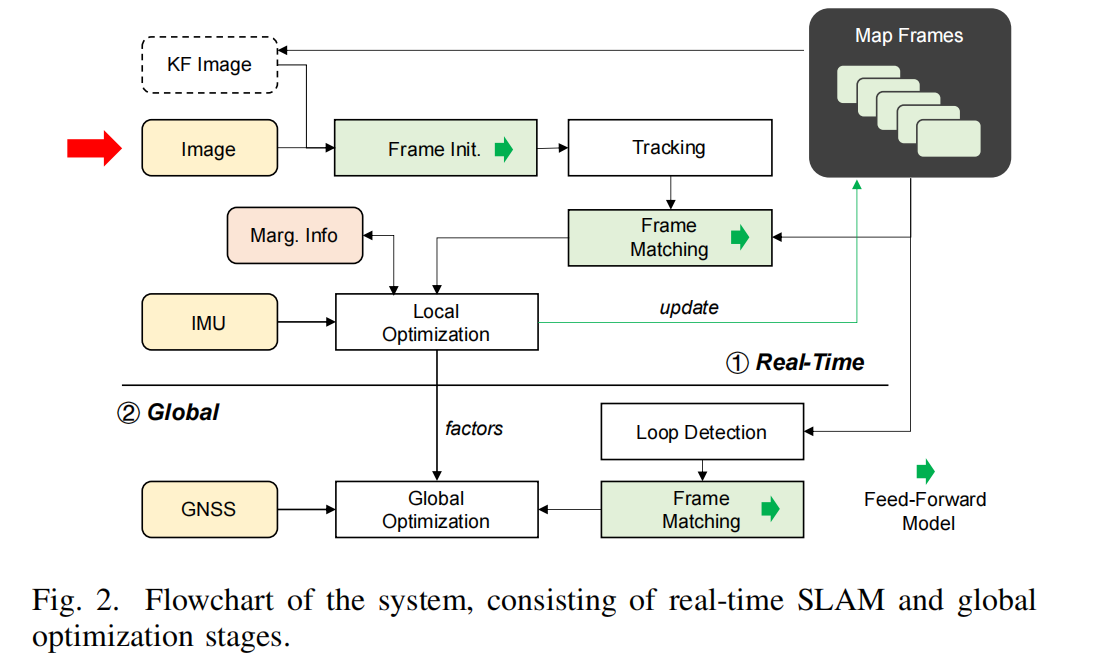
Slide 2: 系统总览 (System Overview)
两大阶段
实时SLAM (Real-Time): 前端利用MASt3R进行稠密跟踪,后端基于滑动窗口因子图融合IMU。
全局优化 (Global Optimization): 融合回环检测与GNSS绝对定位。
关键模块
Visual Frontend: MASt3R Network → Pointmaps → Sim(3) Constraints.
Fusion Backend: Sim(3)-to-SE(3) Bridge → Factor Graph Optimization.
Slide 3: 视觉前端 - 稠密测量模型 (Visual Measurement)
输入与输出
输入: 图像对 Ii,IjI_i, I_jIi,Ij。
网络Fdec\mathcal{F}_{dec}Fdec输出:
Xiij,Xjij,Diij,Djij=Fdec(Fi,Fj)X_i^{ij}, X_j^{ij}, D_i^{ij}, D_j^{ij} = \mathcal{F}_{dec}(F_i, F_j)Xiij,Xjij,Diij,Djij=Fdec(Fi,Fj)
X: 稠密3D点云图 (Pointmaps),定义在局部坐标系,尺度未知。
D: 像素级描述子图。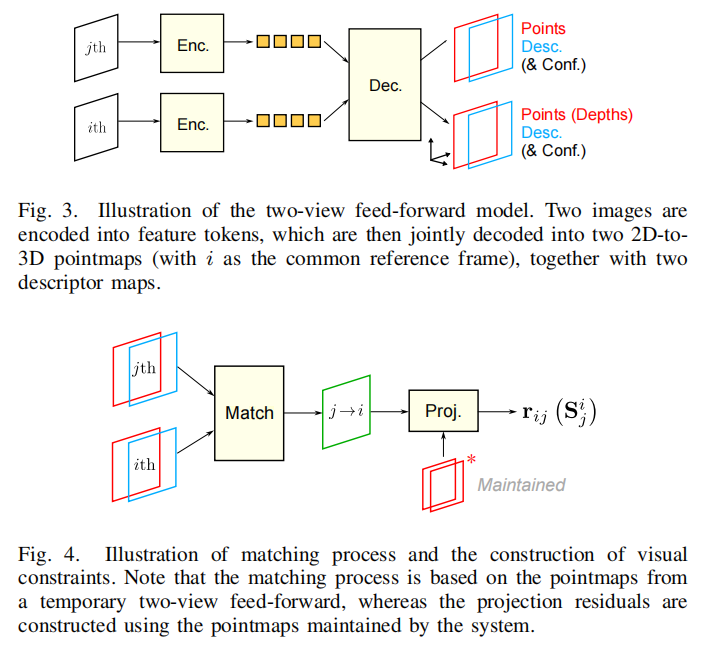
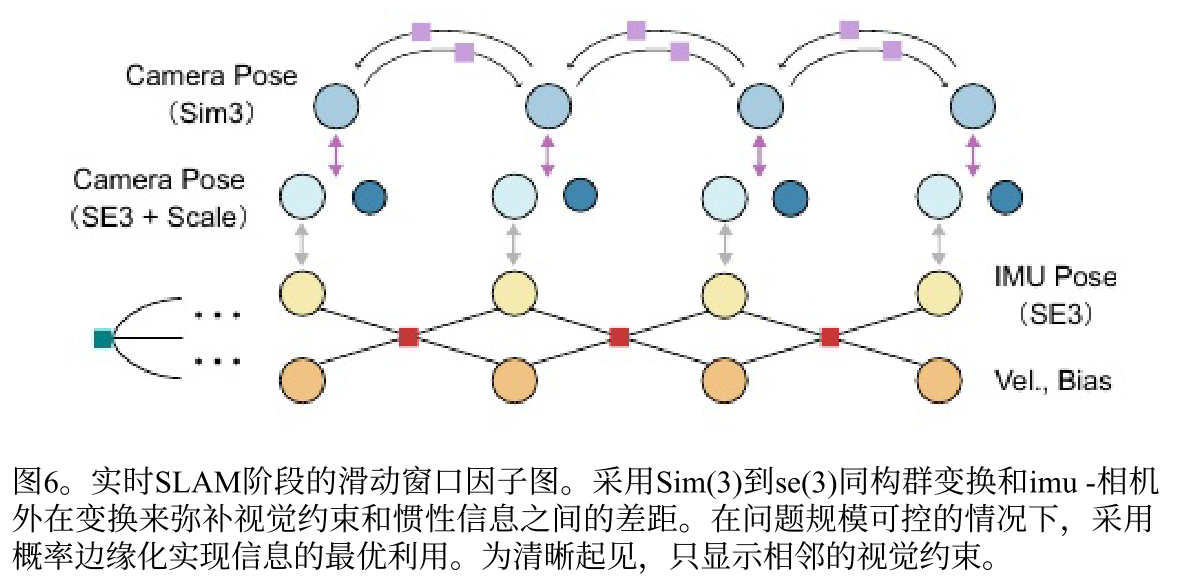
Slide 4: 核心推导I - Sim(3)视觉残差构建
核心选择:为什么是Sim(3)?
原因: 网络输出缺乏绝对尺度,必须优化两帧间的相似变换 Sji=[sRt01]S_j^i = \begin{bmatrix} sR & t \\ 0 & 1 \end{bmatrix}Sji=[sR0t1]。
残差函数定义 (重点公式)
rij(Sji)=[uji−π(Sji∘Xj)(Xi[uji])z−(Sji∘Xj)z]r_{ij}(S_j^i) = \begin{bmatrix} u_j^i - \pi(S_j^i \circ X_j) \\ (X_i[u_j^i])_z - (S_j^i \circ X_j)_z \end{bmatrix}rij(Sji)=[uji−π(Sji∘Xj)(Xi[uji])z−(Sji∘Xj)z]
ujiu_j^iuji推导?
初次关联: 利用点云 XiijX_i^{ij}Xiij 和 XjijX_j^{ij}Xjij 的空间接近度。系统寻找 iii 帧中的哪个像素 uuu 指向的 3D 方向与 jjj 帧中预测的 3D 点方向一致。公式如下 :
u^ji=argminuji∥Xiij[uji]∥Xiij[uji]∥−Xjij∥Xjij∥∥\hat{u}_{j}^{i} = \arg \min_{u_{j}^{i}} \left\| \frac{X_{i}^{ij}[u_{j}^{i}]}{\|X_{i}^{ij}[u_{j}^{i}]\|} - \frac{X_{j}^{ij}}{\|X_{j}^{ij}\|} \right\|u^ji=argujimin
∥Xiij[uji]∥Xiij[uji]−∥Xjij∥Xjij
这里利用归一化坐标来消除尺度不确定性的干扰,锁定大致的像素对应位置 。
精细化关联: 在 u^ji\hat{u}_j^iu^ji 的邻域内,利用输出的描述子 DiijD_i^{ij}Diij 和 DjijD_j^{ij}Djij 进行点积搜索,找到特征最相似的点,从而获得最终高精度的像素对应关系 ujiu_j^iuji 。
物理意义解析
2D重投影约束: 约束平面几何一致性,变换后的点投影回图像应与观测点重合。
3D深度约束: 约束深度一致性,变换后的深度应等于参考帧预测深度。
核心作用: 有效约束纯旋转 (Pure Rotation) 运动,防止模型退化。
Slide 5: 核心推导II - 信息的压缩与线性化
非线性最小二乘问题
目标函数: E=∑∥rij∥Qij2E = \sum \|r_{ij}\|^2_{Q_{ij}}E=∑∥rij∥Qij2
EEE (误差总和):这是系统需要最小化的目标,即所有帧间视觉匹配误差的总和 。
rijr_{ij}rij (视觉残差):由公式 (11) 定义,包含了 2D 重投影误差和 3D 深度残差 。它描述了当前位姿估计与神经网络预测的 3D 结构之间的不一致性 。
QijQ_{ij}Qij (权重矩阵):用于调整不同观测值的可信度 。它综合考虑了神经网络输出的置信度图(Confidence Map)以及用于抑制离群点的 Huber 鲁棒核函数 。
一阶泰勒展开 (Linearization)
公式: rij(S⊕η)≈rij(S)+Jijηr_{ij}(S \oplus \eta) \approx r_{ij}(S) + J_{ij} \etarij(S⊕η)≈rij(S)+Jijη
说明: η∈R7\eta \in \mathbb{R}^7η∈R7 为Sim(3)李代数扰动。
海森矩阵提取 (Hessian Extraction)
核心问题: 像素数量NNN巨大 (H×WH \times WH×W),直接优化计算量过高。
GPU加速策略: 在GPU上计算每个像素的JTJJ^T JJTJ,累加得到紧凑海森矩阵。
核心公式:
Hij=∑k=1N(JkTQkJk)∈R7×7H_{ij} = \sum_{k=1}^N (J_k^T Q_k J_k) \in \mathbb{R}^{7 \times 7}Hij=k=1∑N(JkTQkJk)∈R7×7
vij=∑k=1N−(JkTQkrk)∈R7×1v_{ij} = \sum_{k=1}^N -(J_k^T Q_k r_k) \in \mathbb{R}^{7 \times 1}vij=k=1∑N−(JkTQkrk)∈R7×1
优化策略: 仅将Hij,vijH_{ij}, v_{ij}Hij,vij传回CPU进行后端优化,降低数据传输成本。
Slide 6: 核心推导III - 同构群变换 (Isomorphic Transformation)
核心问题 (Problem)
前端输出: Sim(3)约束η\etaη (7自由度)。
后端状态: SE(3)姿态 + 独立尺度sss (6+1自由度)。
待解问题: 如何将HSim3H_{Sim3}HSim3转换到VIO因子图中?
核心同构关系
S∘p=sRp+t≡T∘(s⋅p)=R(sp)+tS \circ p = sRp + t \quad \equiv \quad T \circ (s \cdot p) = R(sp) + tS∘p=sRp+t≡T∘(s⋅p)=R(sp)+t
扰动映射 (Perturbation Mapping)
Sim(3)扰动: η=[ω,ν,σ]T\eta = [\omega, \nu, \sigma]^Tη=[ω,ν,σ]T
SE(3)及尺度扰动: ξ=[θ,τ]T\xi = [\theta, \tau]^Tξ=[θ,τ]T + 尺度扰动δs\delta sδs
Slide 7: 核心推导IV - 雅可比矩阵A的推导
线性关系建立
核心公式:[sRt01][ω∧+σIν00]≈[Rt01][θ∧τ00][s+δs001]\begin{bmatrix} sR & t \\ 0 & 1 \end{bmatrix} \begin{bmatrix} \omega^\wedge + \sigma I & \nu \\ 0 & 0 \end{bmatrix} \approx \begin{bmatrix} R & t \\ 0 & 1 \end{bmatrix} \begin{bmatrix} \theta^\wedge & \tau \\ 0 & 0 \end{bmatrix} \begin{bmatrix} s+\delta s & 0 \\ 0 & 1 \end{bmatrix}[sR0t1][ω∧+σI0ν0]≈[R0t1][θ∧0τ0][s+δs001]
逐项推导结论
旋转项: ω=θ\omega = \thetaω=θ(旋转独立,不受尺度影响)。
尺度项: σ≈s−1δs\sigma \approx s^{-1} \delta sσ≈s−1δs(对数微分与线性微分的近似关系)。
平移项 (关键): ν=s⋅τ\nu = s \cdot \tauν=s⋅τ;Sim(3)平移ν\nuν定义在归一化空间,SE(3)平移τ\tauτ定义在物理空间,物理位移需缩放sss倍。
转换矩阵A (核心)
A=diag(I3×3,s⋅I3×3,s−1)A = \text{diag}(I_{3\times3}, \quad s \cdot I_{3\times3}, \quad s^{-1})A=diag(I3×3,s⋅I3×3,s−1)
Slide 8: 实时因子图构建 (Factor Graph)
1. 状态向量的定义 (State Vector)
首先,系统维护一个滑动窗口内的状态集合 X\mathcal{X}X :
Xi=(Ti,si,vi,bi)\mathcal{X}_{i} = (T_{i}, s_{i}, v_{i}, b_{i}) \quad Xi=(Ti,si,vi,bi)
Ti∈SE(3)T_{i} \in SE(3)Ti∈SE(3): 第 iii 个关键帧在世界坐标系下的位姿(旋转和平移) 。
si∈Rs_{i} \in \mathbb{R}si∈R: 尺度参数,用于校正视觉点云的比例 。
vi∈R3v_{i} \in \mathbb{R}^{3}vi∈R3: 机体在世界系下的速度 。
bi=(big,bia)b_{i} = (b_{i}^{g}, b_{i}^{a})bi=(big,bia): IMU 的角速度零偏和加速度零偏 。
精度说明:为了防止大尺度场景下的数值漂移,所有状态量均使用 double precision (float64) 维护 。
2. 视觉因子的构造 (Visual Factor)
视觉因子采用了**二次型因子(Quadric-form factor)**的形式,它描述了两帧之间的几何约束 :
Ev(Xi,Xj)=12lv(X)⊤Hv,ijlv(X)−lv(X)⊤vv,ijE_{v}(\mathcal{X}_{i}, \mathcal{X}_{j}) = \frac{1}{2} l_{v}(\mathcal{X})^{\top} H_{v,ij} l_{v}(\mathcal{X}) - l_{v}(\mathcal{X})^{\top} v_{v,ij} \quadEv(Xi,Xj)=21lv(X)⊤Hv,ijlv(X)−lv(X)⊤vv,ij
Ev(Xi,Xj)E_{v}(\mathcal{X}_{i}, \mathcal{X}_{j})Ev(Xi,Xj):表示第 iii 关键帧与第 jjj 关键帧之间的视觉误差能量项(或代价项) 。它衡量了当前状态估计与视觉观测约束之间的不一致程度。
lv(X)l_{v}(\mathcal{X})lv(X):这是一个线性容器 (Linear container) 。它的作用是将当前的系统状态 X\mathcal{X}X 转换为在特定线性化点(基于 Sim(3)Sim(3)Sim(3) 的对齐残差公式)处的李代数 (Lie algebras) 表达 。简单来说,它将复杂的位姿状态映射为优化器可以处理的微小增量。
Hv,ijH_{v,ij}Hv,ij:这是经过转换后的海森信息矩阵 (Hessian information) 。它是将前端 GPU 计算出的原始 Sim(3)Sim(3)Sim(3) 视觉约束矩阵(HijH_{ij}Hij),通过局部到全局的雅可比变换(Jacobian J(i,j)ijJ_{(i,j)}^{ij}J(i,j)ij)以及同构群变换后得到的 。它代表了视觉约束在全局坐标系下的“权重”或“确定性程度”。
vv,ijv_{v,ij}vv,ij:这是转换后的海森形式向量信息 。它是对原始视觉约束向量(vijv_{ij}vij)进行同样的坐标系与空间变换后得到的结果,代表了视觉观测指引的位姿优化方向 。
这里最关键的步骤是 Hv,ijH_{v,ij}Hv,ij 的变换推导 :
{Hv,ij=Λ(i,j)⊤J(i,j)ijHijJ(i,j)ijΛ(i,j)vv,ij=Λ(i,j)⊤J(i,j)ijvij\begin{cases} H_{v,ij} = {\Lambda_{(i,j)}}^{\top} J_{(i,j)}^{ij} H_{ij} J_{(i,j)}^{ij} \Lambda_{(i,j)} \\ v_{v,ij} = {\Lambda_{(i,j)}}^{\top} J_{(i,j)}^{ij} v_{ij} \end{cases} \quad{Hv,ij=Λ(i,j)⊤J(i,j)ijHijJ(i,j)ijΛ(i,j)vv,ij=Λ(i,j)⊤J(i,j)ijvij
公式推导逻辑连贯性说明:
输入信息 (Hij,vijH_{ij}, v_{ij}Hij,vij): 这是前端 GPU 在 float32 精度下算出来的基于 Sim(3)Sim(3)Sim(3) 的海森矩阵和梯度 。
雅可比映射 J(i,j)ijJ_{(i,j)}^{ij}J(i,j)ij: 将残差相对于局部 Sim(3)Sim(3)Sim(3) 的雅可比,映射到全局 Sim(3)Sim(3)Sim(3) 状态上 。
同构变换 Λ(i,j)\Lambda_{(i,j)}Λ(i,j): 这是我们在 V. A 章节 推导的核心矩阵 AAA 。它负责将 Sim(3)Sim(3)Sim(3) 李代数扰动映射为 SE(3)SE(3)SE(3) 姿态扰动和尺度扰动 δs\delta sδs 。
结果: 经过这一系列左乘和右乘,前端的视觉信息被完美“翻译”成了后端因子图可以直接理解的语言 。
3. IMU 预积分因子 (IMU Pre-integration Factor)
系统使用经典的预积分技术来约束连续关键帧之间的运动 :
rb(Xk,Xk+1)=[Rbkw⊤(pbk+1w−pbkw+12gwΔtk2−vbkwΔtk)−Δp~bk+1bkRbkw⊤(vbk+1w+gwΔtk−vbkw)−Δv~bk+1bkLog((Rbkw)−1Rbk+1w(ΔR~bk+1bk)−1)bk+1a−bkabk+1g−bkg]r_{b}(\mathcal{X}_{k}, \mathcal{X}_{k+1}) = \begin{bmatrix} R_{b_{k}}^{w \top} (p_{b_{k+1}}^{w} - p_{b_{k}}^{w} + \frac{1}{2} g^{w} \Delta t_{k}^{2} - v_{b_{k}}^{w} \Delta t_{k}) - \Delta\tilde{p}_{b_{k+1}}^{b_{k}} \\ R_{b_{k}}^{w \top} (v_{b_{k+1}}^{w} + g^{w} \Delta t_{k} - v_{b_{k}}^{w}) - \Delta\tilde{v}_{b_{k+1}}^{b_{k}} \\ \text{Log} \left( (R_{b_{k}}^{w})^{-1} R_{b_{k+1}}^{w} (\Delta\tilde{R}_{b_{k+1}}^{b_{k}})^{-1} \right) \\ b_{k+1}^{a} - b_{k}^{a} \\ b_{k+1}^{g} - b_{k}^{g} \end{bmatrix}rb(Xk,Xk+1)=
Rbkw⊤(pbk+1w−pbkw+21gwΔtk2−vbkwΔtk)−Δp~bk+1bkRbkw⊤(vbk+1w+gwΔtk−vbkw)−Δv~bk+1bkLog((Rbkw)−1Rbk+1w(ΔR~bk+1bk)−1)bk+1a−bkabk+1g−bkg
该残差项包含了位置、速度、旋转以及零偏的随时间演变误差 。+1
IMU-Camera 外参融合:
由于 IMU 和相机不在同一个位置,推导中必须考虑外参 TcbT_c^bTcb :+1
Tbiw=Ti∘Tcb−1T_{b_{i}}^{w} = T_{i} \circ T_{c}^{b^{-1}} \quad Tbiw=Ti∘Tcb−1
这确保了视觉观测到的相机运动与 IMU 感知到的机体运动在数学上是一致的 。
4. 系统总成本函数 (Total Cost Function)
最后,所有的因子被汇总到一个非线性优化问题中(公式 34) :
minX(∑i∈W∣∣rb(Xi,Xi+1)∣∣2+∑(i,j)∈EEv(Xi,Xj)+Em(X))[cite:312]\min_{\mathcal{X}} \left( \sum_{i \in \mathcal{W}} ||r_{b}(\mathcal{X}_{i}, \mathcal{X}_{i+1})||^{2} + \sum_{(i,j) \in \mathcal{E}} E_{v}(\mathcal{X}_{i}, \mathcal{X}_{j}) + E_{m}(\mathcal{X}) \right) \quad [cite: 312]Xmin
i∈W∑∣∣rb(Xi,Xi+1)∣∣2+(i,j)∈E∑Ev(Xi,Xj)+Em(X)
[cite:312]
第一项:IMU 约束,提供尺度和重力方向感 。+2
第二项:视觉约束,提供精确的局部几何结构 。+2
第三项 Em(X)E_m(\mathcal{X})Em(X):边缘化因子(Marginalization factor),代表被移出窗口的旧帧所留下的信息先验 。+1
Slide 10: 实验结果 (Experiments)
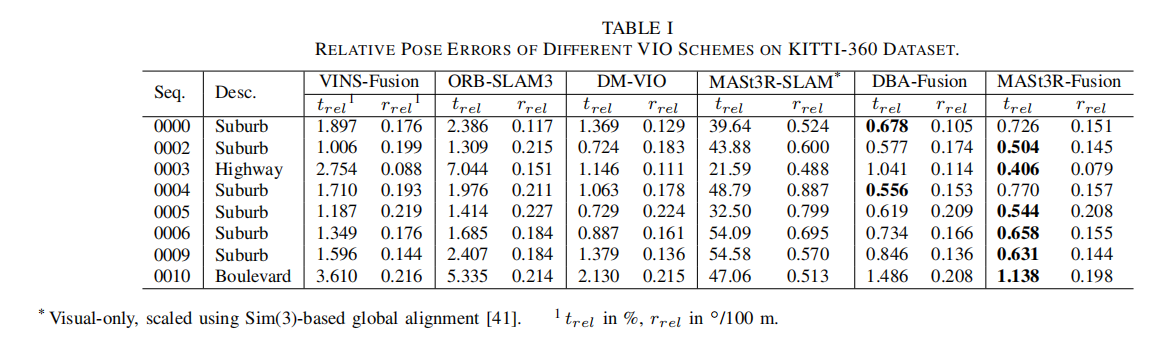
KITTI−360数据集上不同VIO方案的相对位姿误差。KITTI-360数据集上不同VIO方案的相对位姿误差。KITTI−360数据集上不同VIO方案的相对位姿误差。
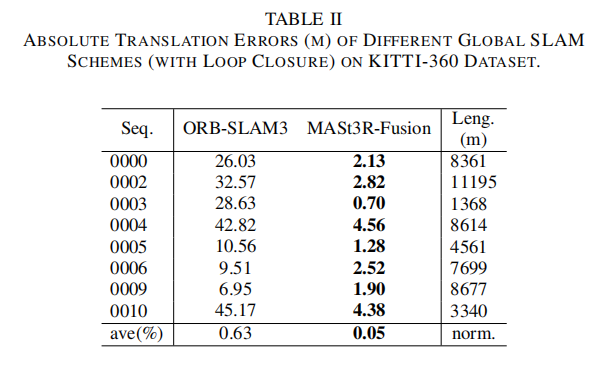
KITTI−360数据集上不同全局SLAM(带闭环)的绝对平移误差(m)KITTI-360数据集上不同全局SLAM(带闭环)的绝对平移误差(m)KITTI−360数据集上不同全局SLAM(带闭环)的绝对平移误差(m)

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 16
16 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)