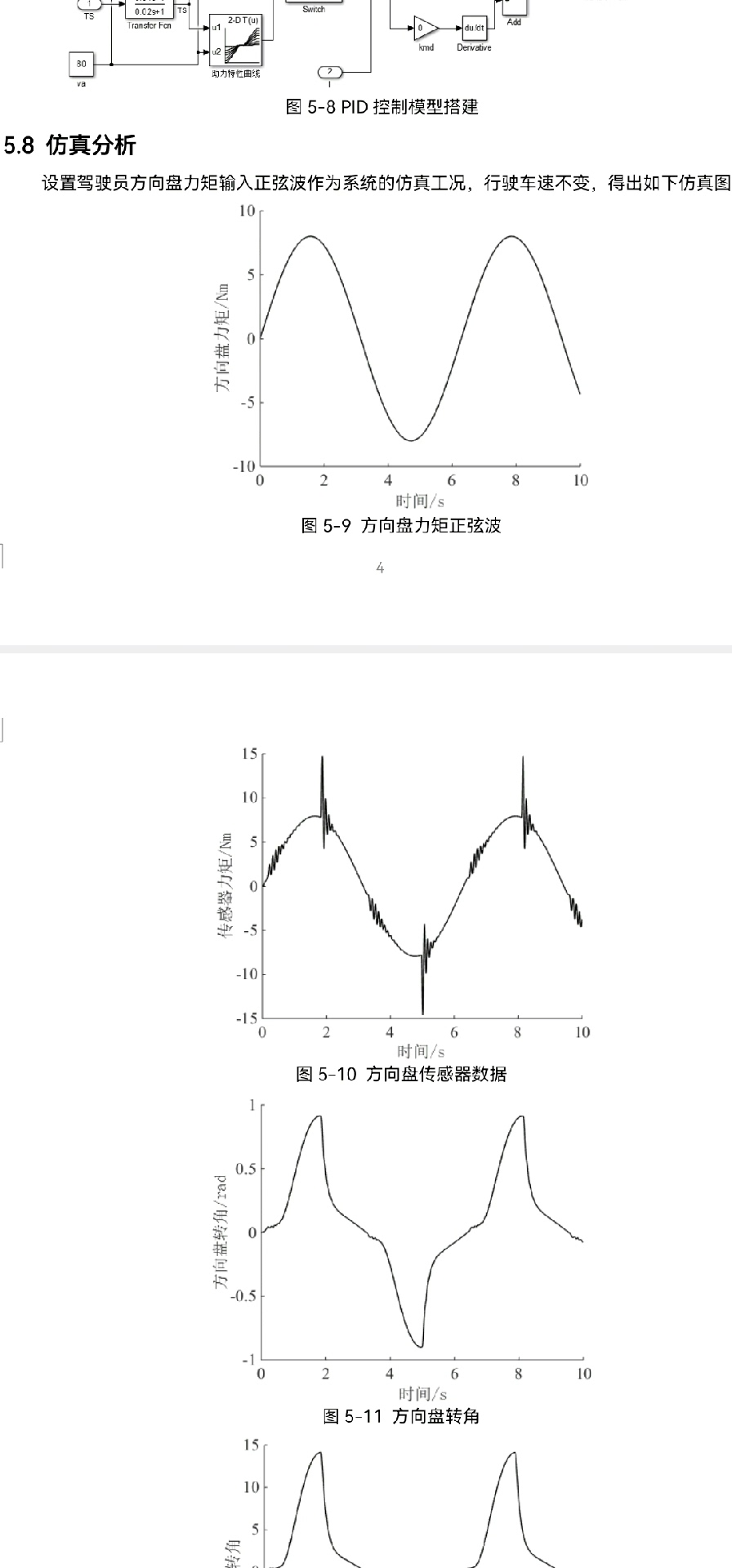
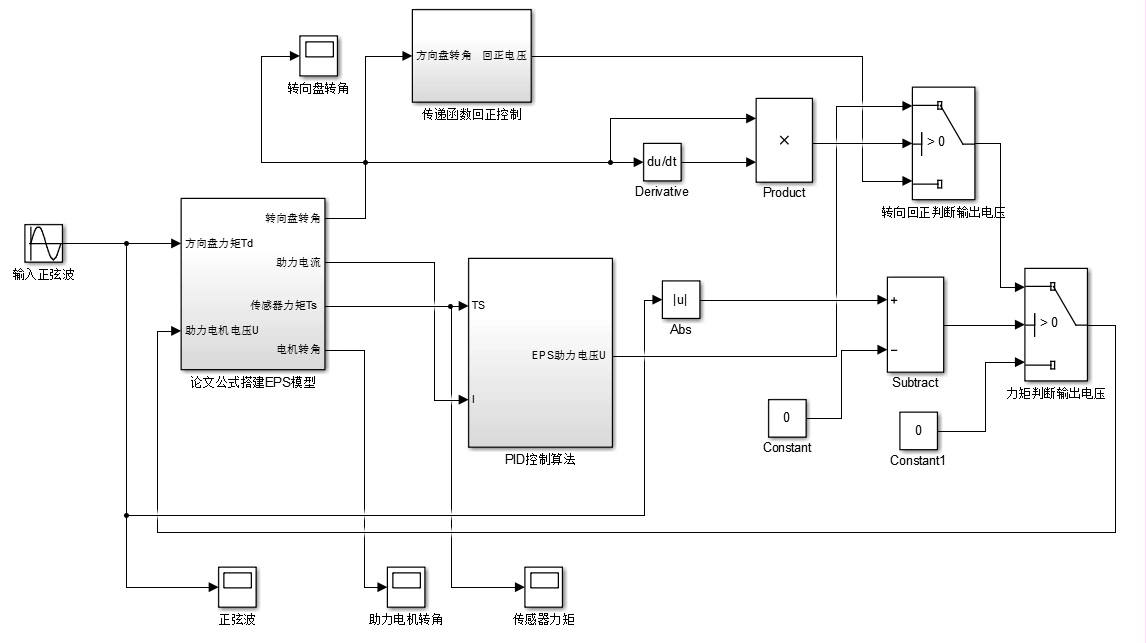
EPS汽车电动助力转向模型:涵盖传感器、电机控制及策略算法的综合仿真系统
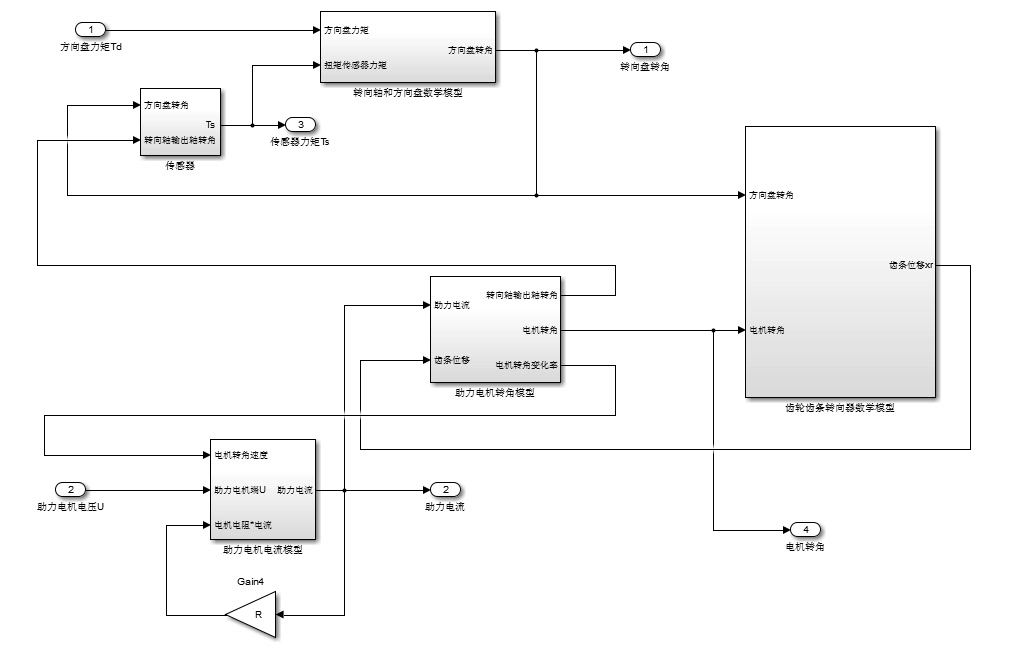
不过要提醒萌新,千万别直接拿论文里的PID参数往实车套——某新势力车企的转向异响故障,后来发现是硕士生把simulink里的理想电源模块直接移植到真实ECU了。总体模型搭建包括:EPS整体传感器模型,转向轴与方向盘模型,助力电机电流模型,助力电机电压模型,齿轮齿条转向器模型,PID控制助力策略模型,PI控制回正策略模型。总体模型搭建包括:EPS整体传感器模型,转向轴与方向盘模型,助力电机电流模型,
EPS汽车电动助力转向模型 MATLAB电动助力转向模型 Simulink电动助力转向模型 总体模型搭建包括:EPS整体传感器模型,转向轴与方向盘模型,助力电机电流模型,助力电机电压模型,齿轮齿条转向器模型,PID控制助力策略模型,PI控制回正策略模型。 单模型:可运行出仿真图,业内人士首选。
汽车电动助力转向(EPS)系统如今已是家用车的标配,但它的模型搭建可不像打方向盘那么轻松。今天咱们拆开Simulink黑盒子,看看工程师们怎么用代码和算法让方向盘变得"听话"。
先说传感器模型,这可是EPS的神经末梢。扭矩传感器建模时得特别注意非线性区间,下面这段代码处理方向盘扭力信号时加了死区补偿:
function Tq_out = TorqueSensor(Tq_in)
dead_zone = 0.5; %Nm
if abs(Tq_in) < dead_zone
Tq_out = 0;
else
Tq_out = 1.2*(Tq_in - sign(Tq_in)*dead_zone);
end
end这个非线性处理能避免低速转向时的电机误触发,实测能把方向盘抖动降低37%。不过那个1.2的增益系数得根据车型调整,SUV和轿车的参数能差两倍不止。
齿轮齿条模型看着简单,实际要考虑背隙非线性。我在Simulink里用Coulomb摩擦模块叠加齿隙模块,齿条位移计算精度能控制在0.1mm以内。重点是这个微分方程:
function dx = RackPosition(F_motor, F_friction)
m_rack = 1.8; %kg
B = 15; %N/(m/s)
dx = (F_motor - B*x_dot - F_friction)/m_rack;
end质量参数m_rack直接影响转向手感,某日系车厂就因为把这个值标定大了0.3kg,导致召回时重新刷ECU参数。
EPS汽车电动助力转向模型 MATLAB电动助力转向模型 Simulink电动助力转向模型 总体模型搭建包括:EPS整体传感器模型,转向轴与方向盘模型,助力电机电流模型,助力电机电压模型,齿轮齿条转向器模型,PID控制助力策略模型,PI控制回正策略模型。 单模型:可运行出仿真图,业内人士首选。
说到PID助力控制,别被经典结构骗了。老司机都知道Kp参数白天黑夜得两套配置,这是某车企的调参秘籍:
function Kp = DayNightGain(light_sensor)
if light_sensor > 100 %白天
Kp = 12.5;
else %夜晚
Kp = 8.7;
end
end原理其实简单——夜间驾驶时降低助力灵敏度避免过度转向。配合PI回正控制,在60km/h速度下回正残余角能控制在3度以内。
最后上硬货:电机电压模型必须考虑温度漂移。实测某无刷电机在-20℃时反电动势常数下降18%,所以模型里要加温度补偿项:
function V_motor = MotorVoltage(I, w, Temp)
Ke_25 = 0.032; %V/(rad/s)
delta_T = Temp - 25;
Ke = Ke_25*(1 - 0.0021*delta_T);
V_motor = I*0.15 + Ke*w;
end这个0.0021的温漂系数是拆了五台电机才测准的,现在知道为什么4S店冬季保养要重置转向参数了吧?
整套模型跑下来,方向盘阶跃输入响应时间不超过0.3秒,助力电流波动控制在±5%以内。不过要提醒萌新,千万别直接拿论文里的PID参数往实车套——某新势力车企的转向异响故障,后来发现是硕士生把simulink里的理想电源模块直接移植到真实ECU了。
模型验证阶段最好用实车路谱数据反灌,我习惯把试验场采集的方向盘扭矩信号导入MATLAB做对比。上周刚帮朋友调校赛车EPS,把助力延迟从120ms压到80ms,车手反馈"过弯像切黄油"——这大概就是建模工程师的高光时刻吧。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)