蚁群与人工势场法融合:Matlab实现动态障碍物躲避路径规划
蚁群+人工势场法融合算法,ACO-APF路径规划算法,躲避动态障碍物 Matlab,在机器人路径规划领域,寻找高效且能适应复杂环境的算法一直是研究热点。今天咱就唠唠蚁群 - 人工势场法融合算法(ACO - APF),以及如何用Matlab实现基于它的动态障碍物躲避路径规划。
蚁群+人工势场法融合算法, ACO-APF路径规划算法, 躲避动态障碍物 Matlab,
在机器人路径规划领域,寻找高效且能适应复杂环境的算法一直是研究热点。今天咱就唠唠蚁群 - 人工势场法融合算法(ACO - APF),以及如何用Matlab实现基于它的动态障碍物躲避路径规划。
蚁群算法(ACO)
蚁群算法模拟蚂蚁觅食行为。蚂蚁在运动过程中会在路径上留下信息素,后续蚂蚁根据信息素浓度选择路径,信息素浓度高的路径被选择概率大。
比如简单的代码示例(Matlab伪代码):
% 初始化信息素矩阵
tau = ones(n,n);
alpha = 1; % 信息素重要程度因子
beta = 2; % 启发函数重要程度因子
for k = 1:m % m只蚂蚁
start = randperm(n,1); % 随机选择起始点
visited = start;
for i = 1:n - 1
% 计算转移概率
allowed = setdiff(1:n,visited);
P = zeros(1,length(allowed));
for j = 1:length(allowed)
P(j) = (tau(visited(end),allowed(j)) ^ alpha) * ((1/distance(visited(end),allowed(j))) ^ beta);
end
P = P / sum(P);
next = allowed(randsample(length(allowed),1,true,P));
visited = [visited,next];
end
% 更新信息素
delta_tau = zeros(n,n);
for i = 1:n - 1
delta_tau(visited(i),visited(i + 1)) = Q / distance(visited(i),visited(i + 1));
end
tau = (1 - rho) * tau + delta_tau;
end这段代码先初始化信息素矩阵,然后每只蚂蚁从随机起点出发,依据信息素和距离的关系计算转移概率来选择下一个节点,遍历完所有节点后更新信息素。
人工势场法(APF)
人工势场法把机器人在环境中的运动视为在虚拟的势场中运动。目标点产生引力势场,障碍物产生斥力势场,机器人在合力作用下朝着目标点移动。
以下是简单的计算斥力的Matlab代码:
% 计算斥力
function F_rep = repulsion_force(robot, obstacle, eta, d0)
d = norm(robot - obstacle);
if d <= d0
F_rep = eta * (1/d - 1/d0) * (1/d^2) * (robot - obstacle);
else
F_rep = [0,0];
end
end这里根据机器人与障碍物的距离 d 来计算斥力,当距离小于设定阈值 d0 时,斥力按公式计算,否则斥力为0。
ACO - APF融合算法
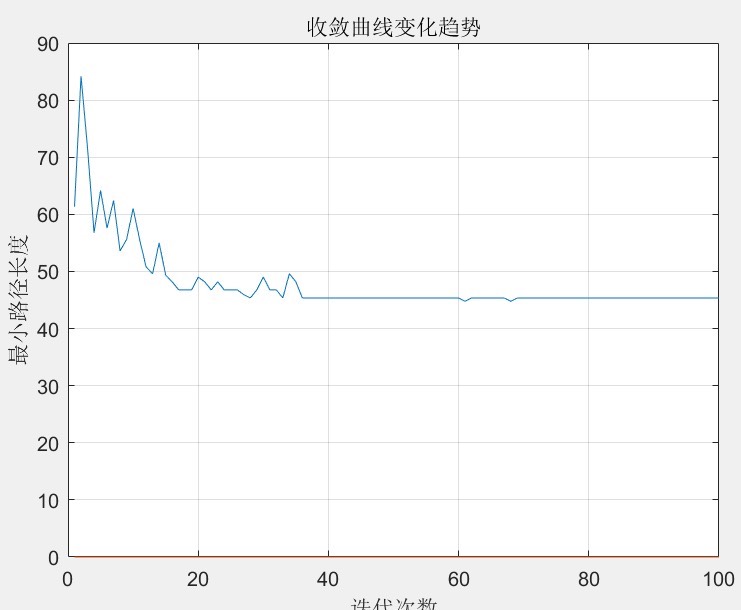
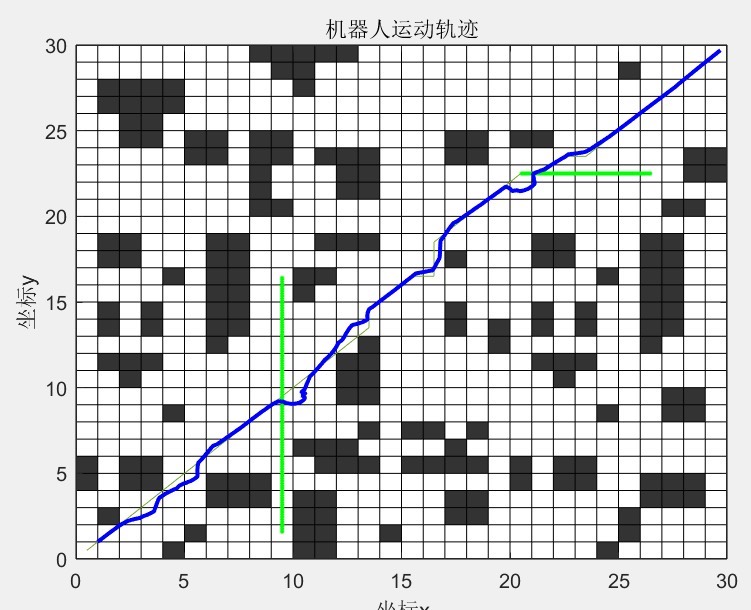
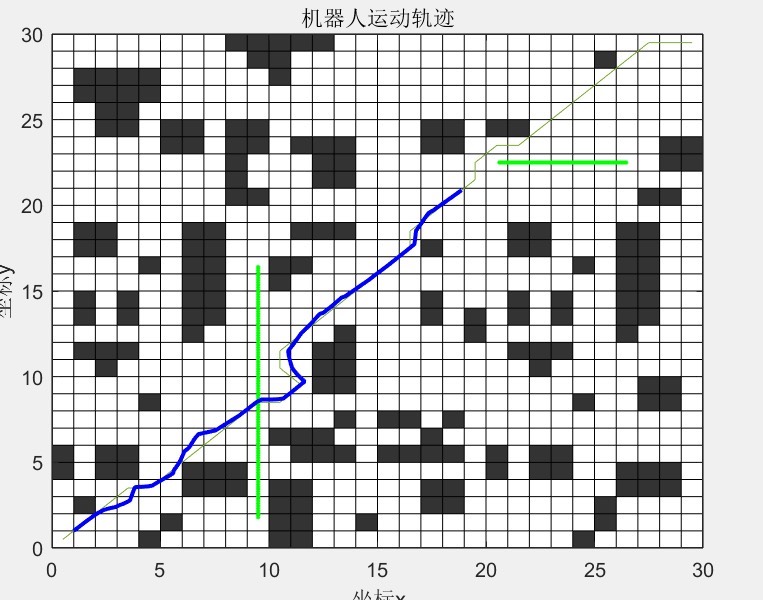
将蚁群算法的全局搜索能力和人工势场法的局部避障能力结合。先用蚁群算法找到大致的可行路径,然后人工势场法对路径进行局部优化,以躲避动态障碍物。
% ACO - APF融合算法主程序
% 先运行蚁群算法得到初步路径
path_aco = ant_colony_optimization();
% 利用人工势场法优化路径躲避动态障碍物
for t = 1:time_steps
for i = 1:length(path_aco)
for j = 1:length(dynamic_obstacles)
F_rep = repulsion_force(path_aco(i,:), dynamic_obstacles(j,:), eta, d0);
% 更新路径点位置
path_aco(i,:) = path_aco(i,:) + F_rep;
end
end
end在这段代码中,先通过蚁群算法得到初步路径 path_aco,然后在每个时间步中,对路径上的每个点计算来自动态障碍物的斥力,并根据斥力更新路径点位置,实现躲避动态障碍物。
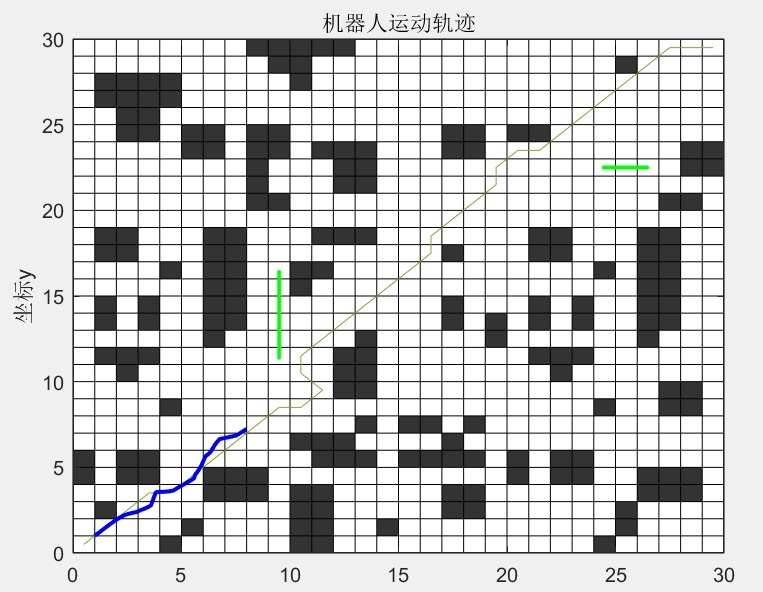
通过这种融合算法,在Matlab中我们就能够让机器人在复杂的动态环境中规划出一条安全高效的路径。希望大家对ACO - APF路径规划算法有了更清晰的认识,也能动手实践起来。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 7
7 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)