智能车的横向避撞算法里有个挺有意思的玩法——用五次多项式搞路径规划。这玩意儿就像给车子画了个带缓冲的逃生通道,咱们今天拆开看看里头的门道
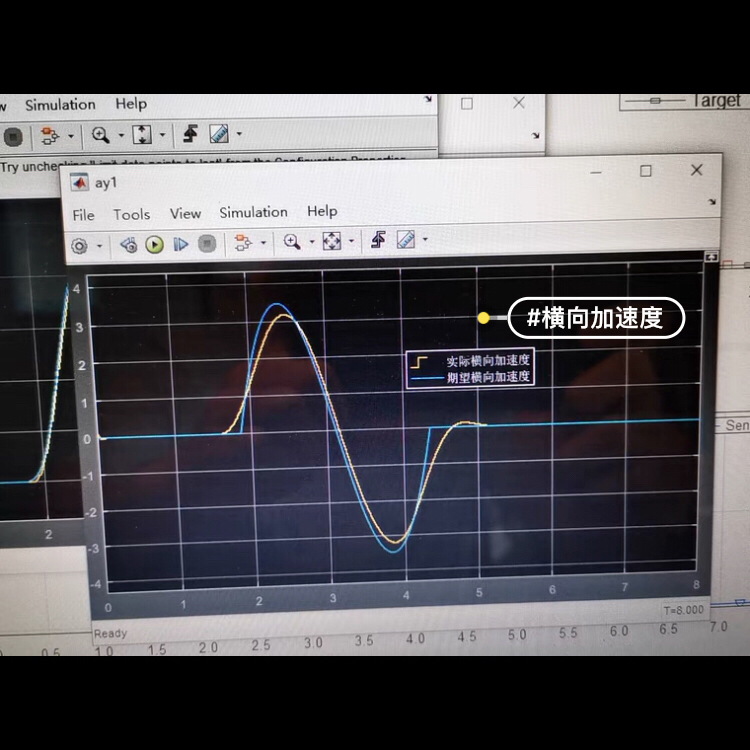
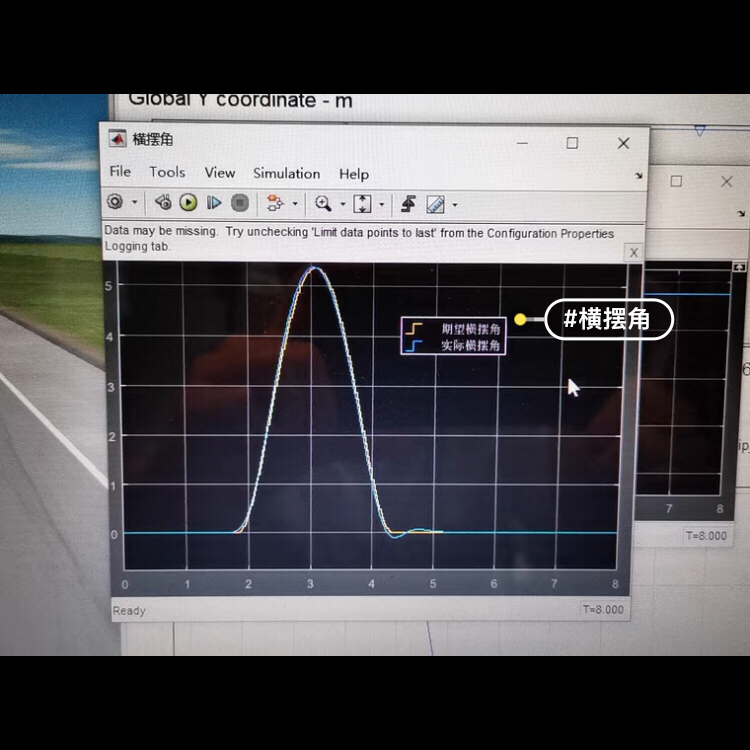
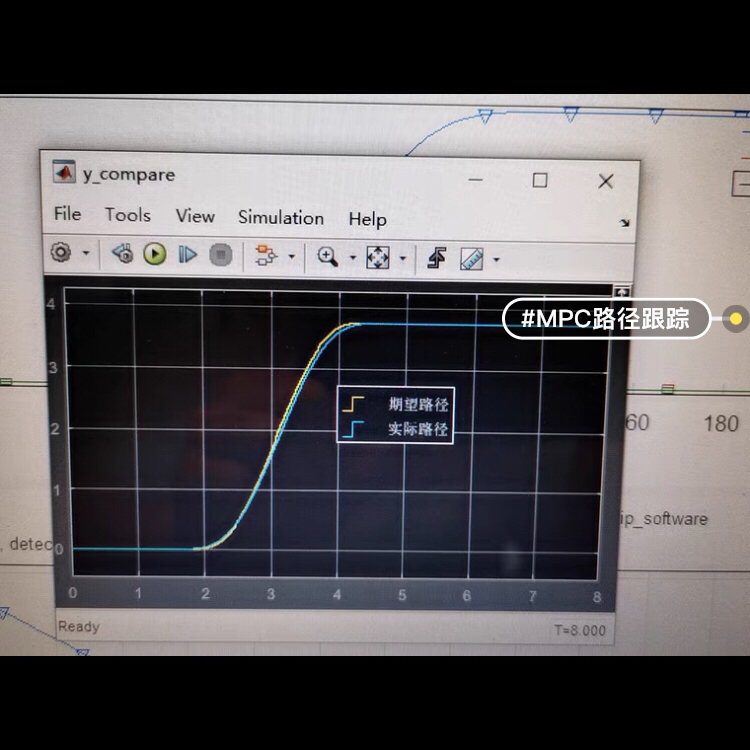
这时候需要在前端路径规划时加入曲率约束,或者在MPC的代价函数里增加曲率变化率的惩罚项。具体实现就是在状态变量里加入航向角二阶导的约束,这里面的微分关系处理起来还挺烧脑的。后来发现是动力学模型里的轮胎侧偏刚度参数不准,模型和实际车辆特性不匹配导致的。智能车基于五次多项式的智能车横向避幢模型,首先根据工况计算出预碰撞时间,进而计算出最小转向距离,通过MPC预测控制算法来对规划路径进行跟踪控制。这里的
智能车基于五次多项式的智能车横向避幢模型,首先根据工况计算出预碰撞时间,进而计算出最小转向距离,通过MPC预测控制算法来对规划路径进行跟踪控制。
先说说预碰撞时间(TTC)的计算,这相当于系统的预警雷达。直接上代码更直观:
def calculate_ttc(ego_speed, obstacle_speed, distance):
relative_speed = ego_speed - obstacle_speed
return distance / relative_speed if relative_speed !=0 else float('inf')注意这里要处理相对速度为0的边界情况,否则程序会直接炸给你看。得到TTC后,结合车辆动力学特性算最小转向距离。这里有个经验公式:
def min_avoidance_distance(speed, friction=0.8):
return (speed**2) / (2 * friction * 9.8) * 1.2 # 留20%安全余量这里的安全系数不能照搬教科书,得根据实际路况动态调整,雨天和晴天参数差得不是一星半点。
五次多项式的精髓在于生成顺滑的避障路径。看这个参数生成函数:
def quintic_poly_coeffs(start, end, T):
a0 = start[0]
a1 = start[1]
a2 = start[2]/2.0
A = np.array([
[T**3, T**4, T**5],
[3*T**2, 4*T**3, 5*T**4],
[6*T, 12*T**2, 20*T**3]
])
b = np.array([
end[0] - (a0 + a1*T + a2*T**2),
end[1] - (a1 + 2*a2*T),
end[2] - 2*a2
])
x = np.linalg.solve(A, b)
return [a0, a1, a2, x[0], x[1], x[2]]这矩阵方程看着吓人,其实就是把起终点位置、速度、加速度都匹配上。注意数值稳定性问题,当T趋近于0时得做特殊处理。
MPC控制才是重头戏。核心是这个滚动优化问题:
import cvxpy as cp
def mpc_controller(x0, ref_path):
N = 10 # 预测时域
dt = 0.1
Q = np.diag([10, 1, 5, 2]) # 状态权重
R = np.diag([0.5, 0.2]) # 控制权重
# 定义优化变量
x = cp.Variable((4, N+1))
u = cp.Variable((2, N))
cost = 0
constraints = []
for t in range(N):
cost += cp.quad_form(x[:,t]-ref_path[:,t], Q)
cost += cp.quad_form(u[:,t], R)
# 车辆动力学约束
constraints += [
x[:,t+1] == dynamics_model(x[:,t], u[:,t], dt)
]
# 初始状态约束
constraints += [x[:,0] == x0]
prob = cp.Problem(cp.Minimize(cost), constraints)
prob.solve(solver=cp.ECOS)
return u[:,0].value这里有几个实战技巧:预测时域不是越长越好,得在计算资源和控制效果间找平衡。权重参数Q和R需要实车标定,有时候还得搞自适应调整策略。
调试时发现个反直觉的现象:有时候增加路径跟踪的权重反而导致控制抖动。后来发现是动力学模型里的轮胎侧偏刚度参数不准,模型和实际车辆特性不匹配导致的。所以再好的算法也得建立在准确的车辆模型基础上。
最后说个避坑经验:五次多项式生成的路径虽然连续平滑,但急弯场景下可能出现曲率突变。这时候需要在前端路径规划时加入曲率约束,或者在MPC的代价函数里增加曲率变化率的惩罚项。具体实现就是在状态变量里加入航向角二阶导的约束,这里面的微分关系处理起来还挺烧脑的。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)