数据结构与算法:线段树(六):扫描线与线段树
前言
这篇相比上篇简单太多了……虽然这样,感觉扫描线的思想还是很有用的。
一、包含每个查询的最小区间
class Solution {
public:
typedef pair<int,int> pii;
vector<int> minInterval(vector<vector<int>>& intervals, vector<int>& queries) {
int n=intervals.size();
int m=queries.size();
//根据开头位置从小到大排序
sort(intervals.begin(),intervals.end());
vector<pii>q(m);
for(int i=0;i<m;i++)
{
q[i].first=queries[i];
q[i].second=i;
}
//查询从小到大排序
sort(q.begin(),q.end());
//小根堆维护区间长度
priority_queue<pii,vector<pii>,greater<pii>>pq;
vector<int>ans(m);
for(int i=0,j=0,line=0;i<m;i++)
{
//扫描线
line=q[i].first;
//扫描线穿过的区间入堆
while(j<n&&intervals[j][0]<=line)
{
pq.push({intervals[j][1]-intervals[j][0]+1,intervals[j][1]});
j++;
}
//“懒删除”堆 -> 当脏数据跑到堆顶再删
while(!pq.empty()&&pq.top().second<line)
{
pq.pop();
}
if(!pq.empty())
{
ans[q[i].second]=pq.top().first;
}
else
{
ans[q[i].second]=-1;
}
}
return ans;
}
};这个题的思路其实很简单,首先考虑先对每个区间根据左端点从小到大排序,然后再对每条查询从小到大排序。那么之后就可以根据查询从小到大依次扫过去,中间用一个小根堆维护区间长度。所以当扫描线更新后,先让所有被穿过的区间入堆,然后再删除右端点已经过期的区间,所以此时堆顶的区间就是长度最小的区间。这里注意,即使堆内有过期的区间也不要紧,因为不在堆顶,所以不会对当前的答案产生影响。所以就可以等到过期的区间到了堆顶,对当前答案产生影响了再删除也不迟。
二、天际线问题
class Solution {
public:
typedef pair<int,int> pii;
vector<vector<int>> getSkyline(vector<vector<int>>& buildings) {
int n=buildings.size();
//因为区间有可能恰好重合,所以考虑将闭区间转化成左闭右开
//考虑对每个区间记三个值[l,r-1,r]
//对所有数去重排序进行离散化,用排名代替数值
//之后根据开头位置从小到大排序,用大根堆维护大楼的高度
vector<int>sorted(3*n+1);
int sz=1;
for(int i=0;i<n;i++)
{
sorted[sz++]=buildings[i][0];
sorted[sz++]=buildings[i][1]-1;
sorted[sz++]=buildings[i][1];
}
sort(sorted.begin()+1,sorted.end());
//去重
int len=1;
for(int i=1;i<sz;i++)
{
if(sorted[len]!=sorted[i])
{
sorted[++len]=sorted[i];
}
}
//修改左右边界
for(int i=0;i<n;i++)
{
buildings[i][0]=rank(buildings[i][0],len,sorted);
buildings[i][1]=rank(buildings[i][1]-1,len,sorted);
}
//左边界从小到大排序
sort(buildings.begin(),buildings.end(),[](vector<int>&a,vector<int>&b)
{
return a[0]<b[0];
});
//高度
vector<int>height(len+1);
//大根堆维护高度
priority_queue<pii>heap;
for(int i=1,j=0;i<=len;i++)
{
//小于等于的入堆
while(j<n&&buildings[j][0]<=i)
{
//{高度,右边界}
heap.push({buildings[j][2],buildings[j][1]});
j++;
}
//排除过期的数据
while(!heap.empty()&&heap.top().second<i)
{
heap.pop();
}
if(!heap.empty())
{
height[i]=heap.top().first;
}
}
vector<vector<int>>ans;
for(int i=1,pre=0;i<=len;i++)
{
//去重
if(pre!=height[i])
{
ans.push_back({sorted[i],height[i]});
}
pre=height[i];
}
return ans;
}
//查排名
int rank(int v,int n,vector<int>&sorted)
{
int l=1;
int r=n;
int m;
int ans=0;
while(l<=r)
{
m=(l+r)>>1;
if(sorted[m]<=v)
{
ans=m;
l=m+1;
}
else
{
r=m-1;
}
}
return ans;
}
};首先还是老套路,因为区间有可能重叠,所以考虑将闭区间转化为左闭右开区间。之后同样因为数轴的范围非常大,所以还要考虑对所有值进行离散化。离散化的方法是,对每个区间记三个值l,r-1和r,然后把所有点合起来进行离散化,然后转化原区间的左右边界为左闭右开,并修改为离散化后的排名。
之后,考虑先对左边界从小到大排序,然后用一个大根堆维护高度。之后用扫描线沿着数轴从左往右扫,还是每次让当前扫到的边界入堆,然后淘汰右边界过期的数据,并往高度数组里填入当前的最大值即可。所以最后,只需要再遍历一遍高度数组,对连续相等的高度进行去重即可。
三、扫描线 & 矩形面积并
思路太妙了!
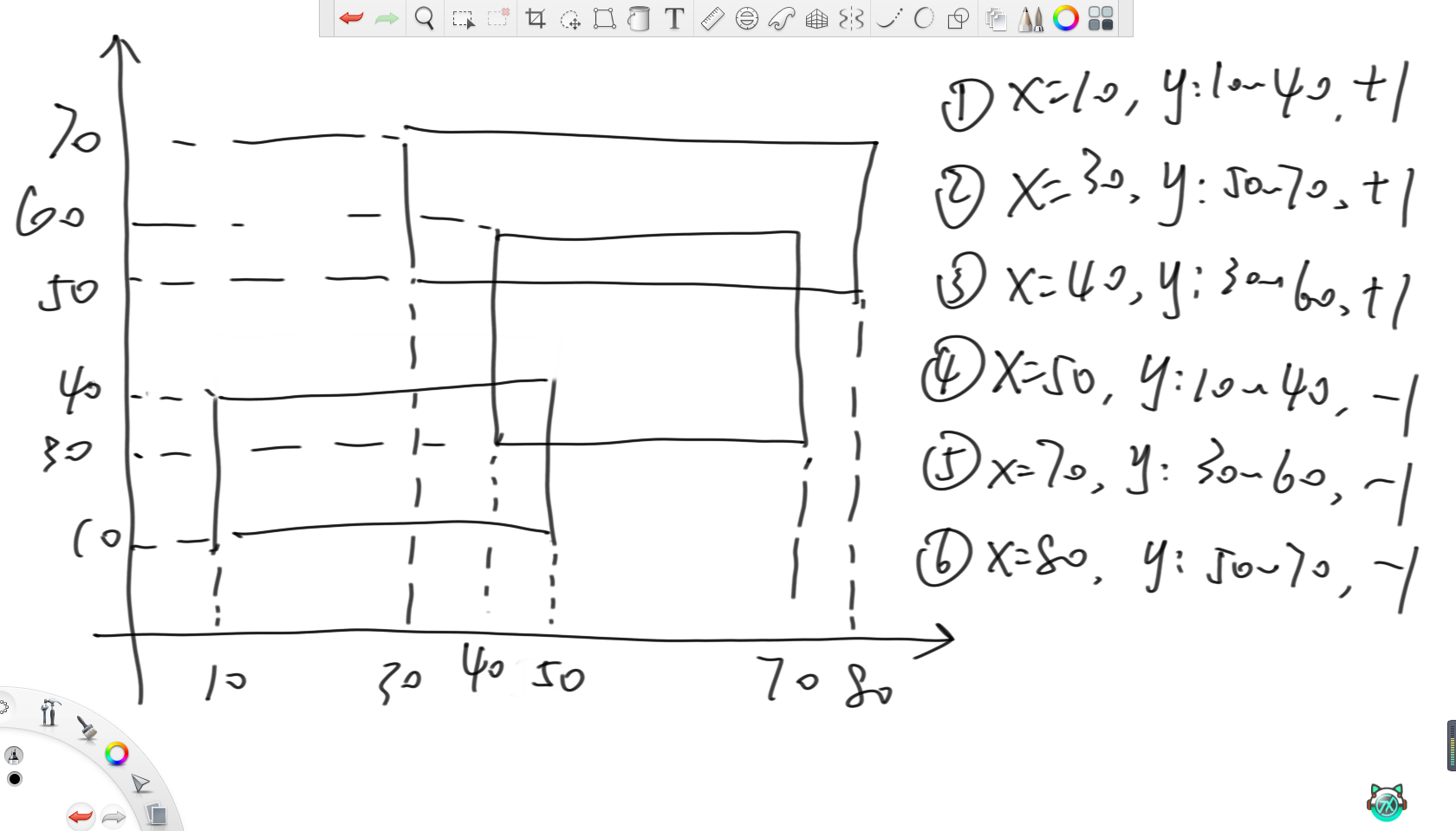
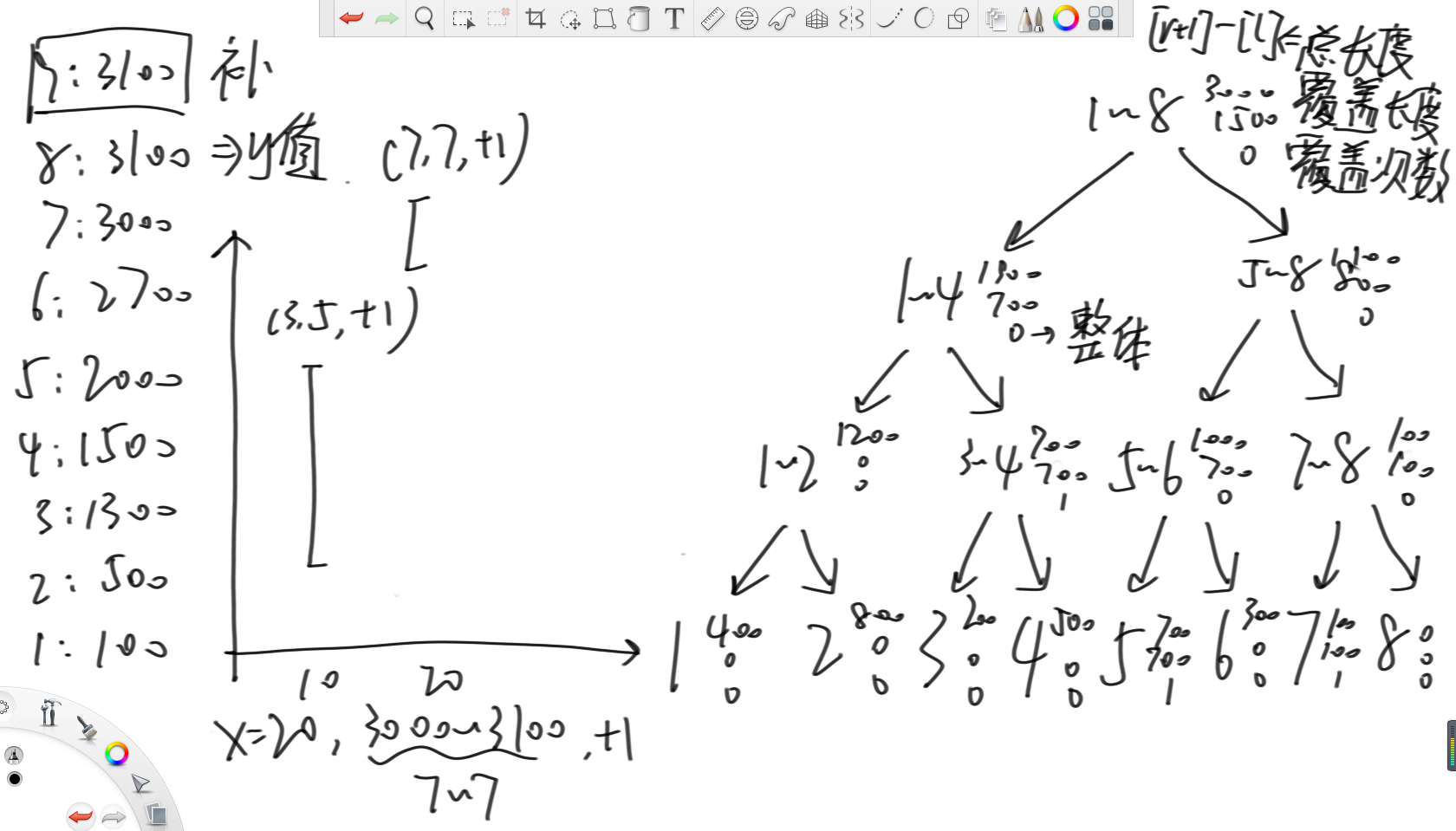
对于这些矩形,首先考虑设置若干个事件,每个事件记录当前在横坐标x位置,在纵坐标的某个区间上出现了一条某个矩形的左边或右边,用+1或-1表示。举个例子,按横坐标从小到大对事件排序后就是如上图所示。
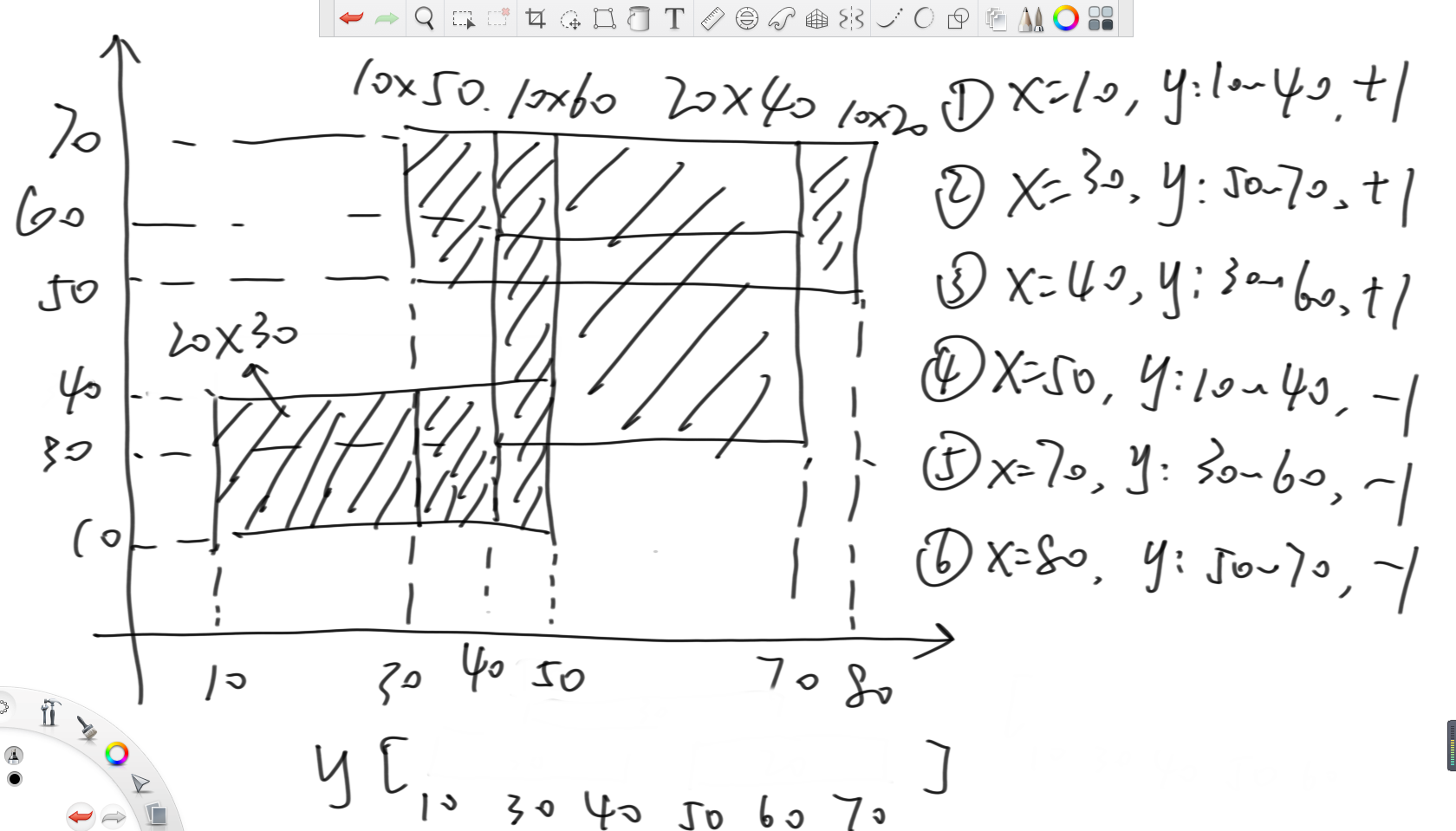
有了这几个事件,那么就可以用扫描线从左往右扫,每次结算当前产生的面积即可。这里首先先默认存在一个结构,可以维护纵坐标上出现的区间的总长度。那么首先第一个事件到来,就在10位置存在了一条[10,40]的边。然后当第二个事件来时,就在30位置存在了一条[50,70]的边。此时,由于到了30位置,那么第一个事件形成的边就可以产生面积的贡献,即产生(30-10)*(40-10)的贡献。注意当第四个事件来时,纵坐标上覆盖的长度为60,并非单纯增加。按照这个方法,遍历完所有事件,就可以统计出所有矩形的面积并。
那么之后就需要考虑如何建立一个结构,去维护纵坐标上出现的区间的长度。
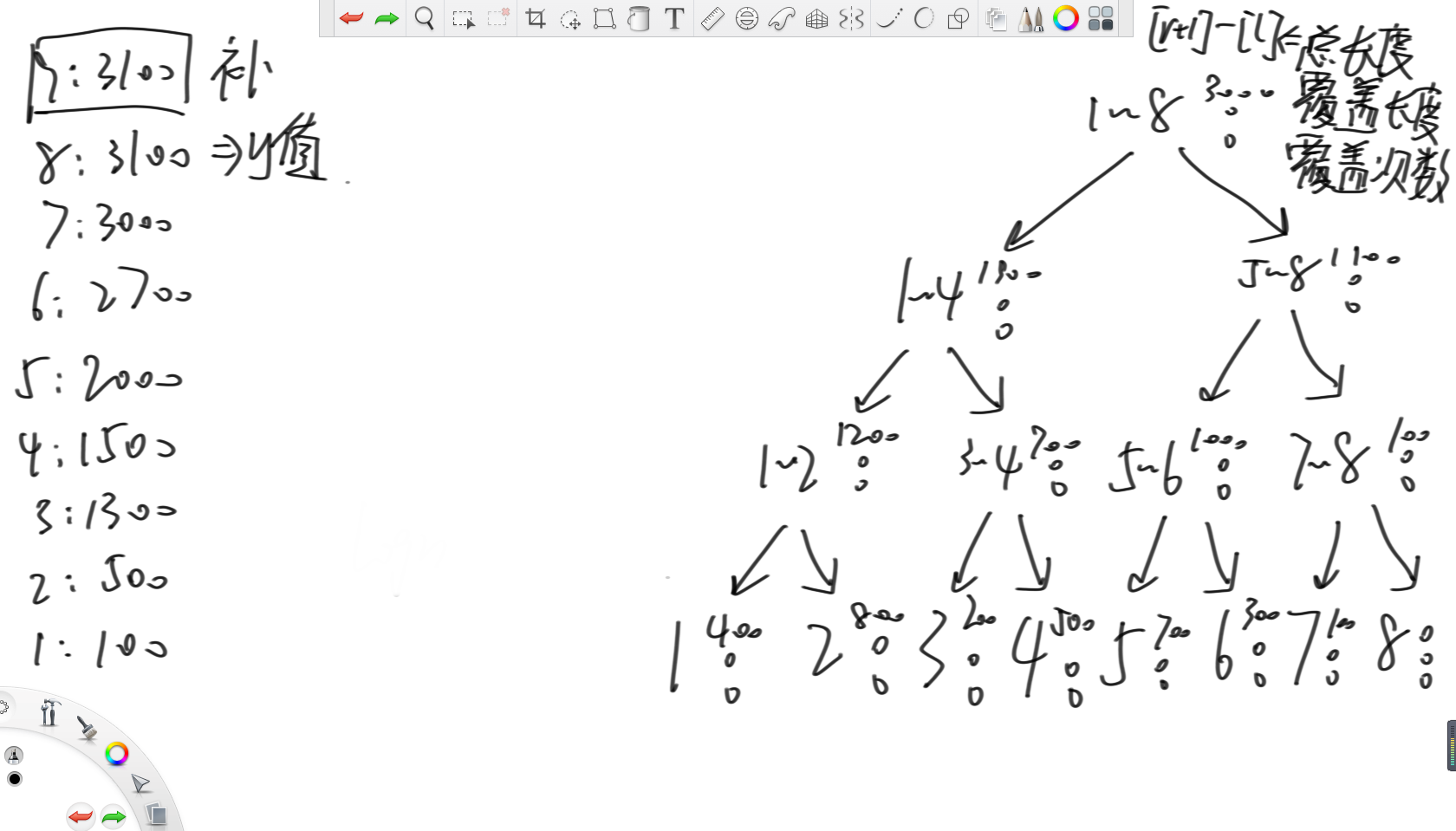
这里,首先收集每个矩形上下边界的纵坐标并排序,然后把最大值重复收集一遍。之后考虑用线段树维护三个信息,分别是区间总长度,区间覆盖长度和区间整体被完全覆盖的次数。那么此时1~8范围上负责的区域,就是8再加1的负责的位置3100,减去1对应的位置100,所以长度为3000。
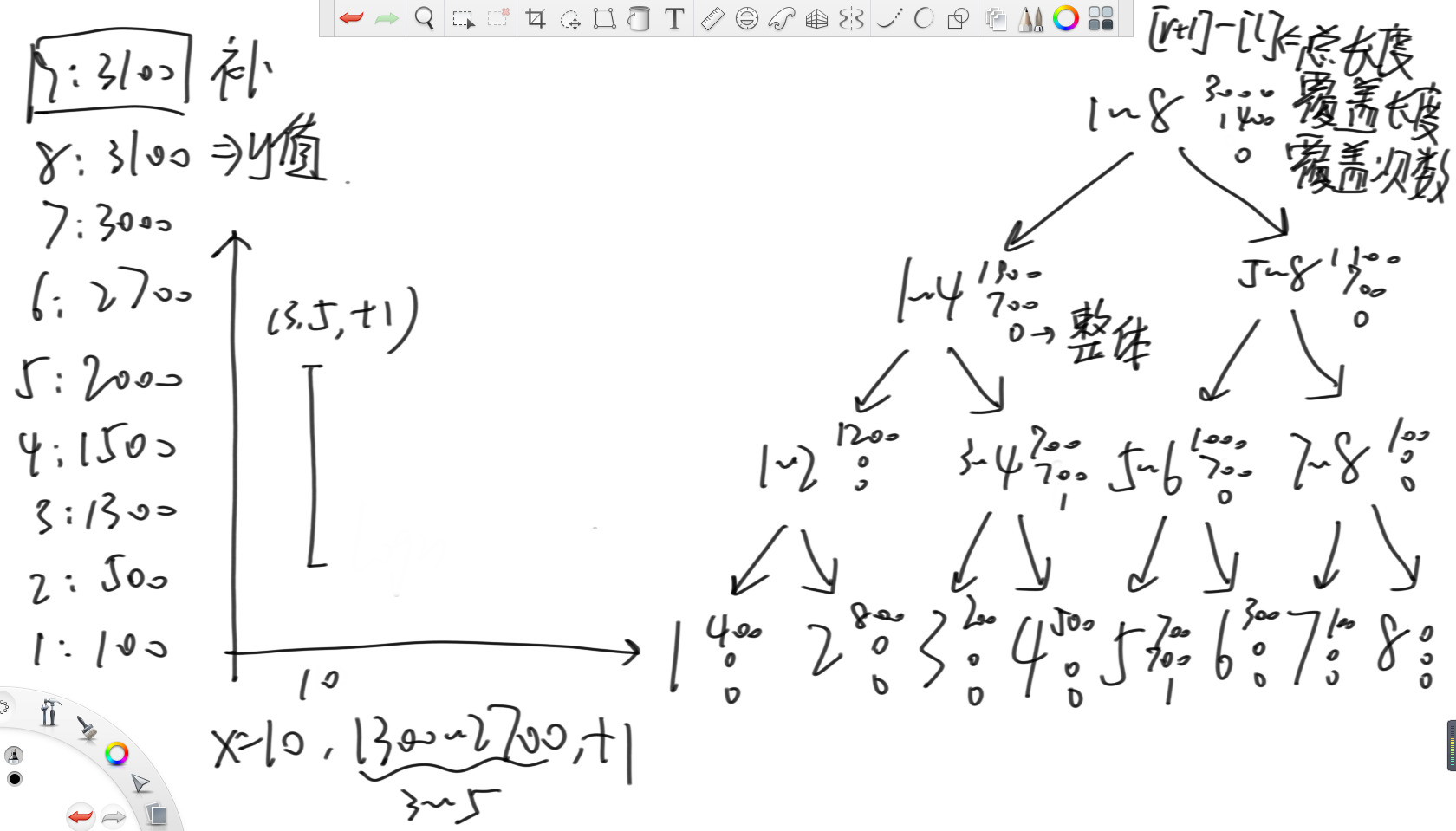
当第一个事件来时,这个区间根据左侧的表可以查到是[3,5]范围,这里注意要向下取。所以在下发时,当下发到[3,4]范围时,由于被全覆盖了,那么就把全覆盖次数+1,覆盖长度修改为700,然后往上汇总。类似地,当来到[5,5]范围时,还是由于被全覆盖了,所以对应修改然后返回即可。
当第二个事件来临时,整体过程和上述差不多,由于3000~3100只由7这个节点负责,那么就是直接暴力下扎到叶节点修改即可。
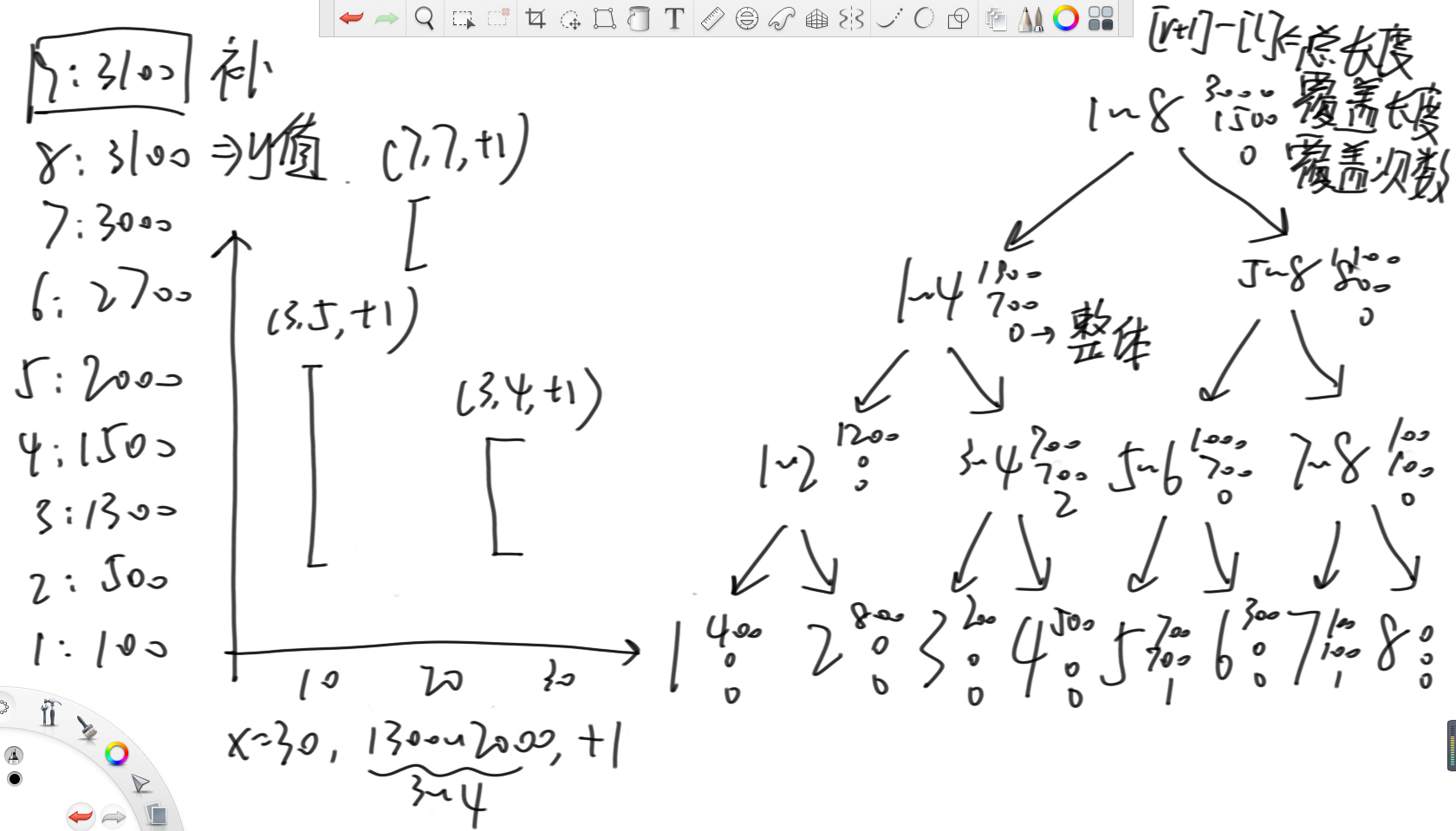
当第三个事件来时,因为负责的区间是[3,4],所以在扎到[3,4]区间时直接修改,将全覆盖的次数加1即可。
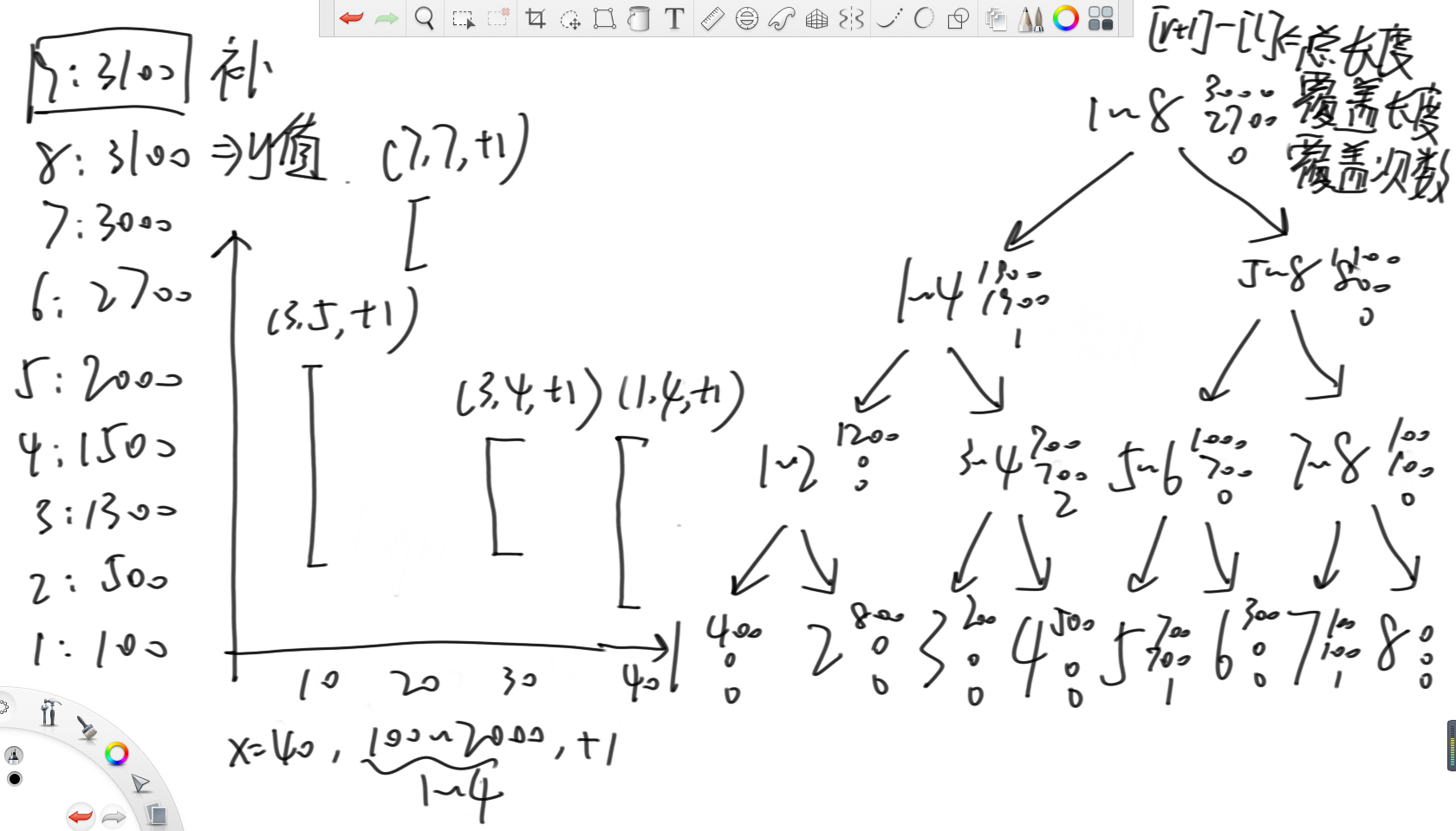
当第四个事件来时,负责的区间是[1,4],所以在扎到[1,4]区间时直接将全覆盖的次数加1,然后将覆盖长度改为区间长度即可。
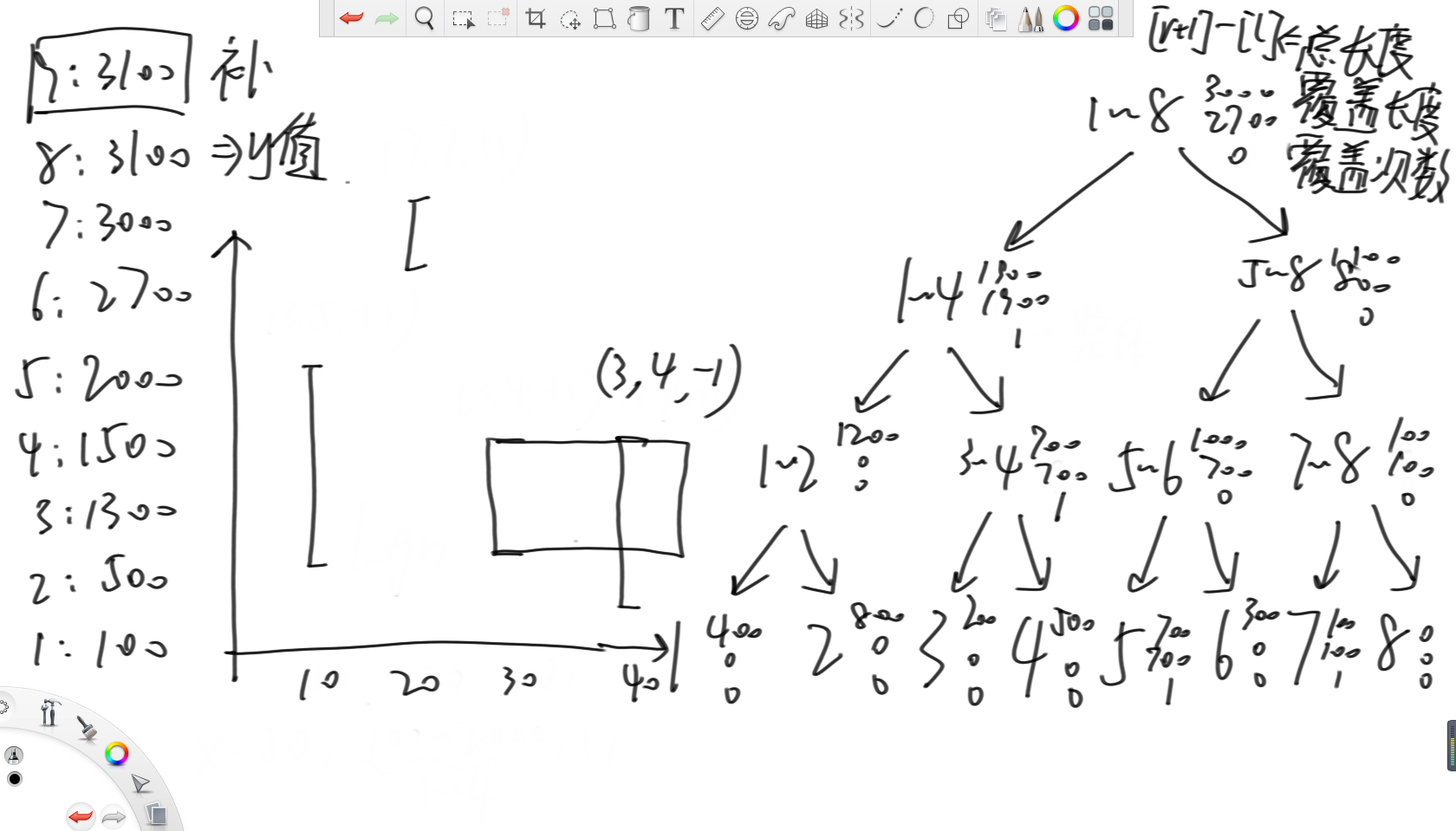
当来到一个终止事件时,负责区间[3,4],所以在扎到对应区间时直接让覆盖次数-1即可。这里注意,因为一个左边界必然对应一个右边界,且每次查询只查询整个范围上的长度,所以线段树不需要懒信息下发。
#include <bits/stdc++.h>
using namespace std;
/* /\_/\
* (= ._.)
* / > \>
*/
typedef long long ll;
typedef pair<int,int> pii;
typedef pair<ll,ll>pll;
const int MAXN=3e5+5;
//矩形坐标
vector<vector<int>>rec(MAXN,vector<int>(4));
//矩形两竖直边的事件
vector<vector<int>>line(MAXN,vector<int>(4));
//y值离散化
vector<int>ysort(MAXN);
//总长度
vector<int>length(MAXN<<2);
//覆盖长度
vector<int>cover(MAXN<<2);
//整体覆盖次数
vector<int>times(MAXN<<2);
void up(int i)
{
//被全覆盖
if(times[i]>0)
{
cover[i]=length[i];
}
//没被全覆盖
else
{
cover[i]=cover[i<<1]+cover[i<<1|1];
}
}
void add(int jobl,int jobr,int jobv,int l,int r,int i)
{
if(jobl<=l&&r<=jobr)
{
//增加覆盖次数
times[i]+=jobv;
}
else
{
int m=(l+r)>>1;
if(jobl<=m)
{
add(jobl,jobr,jobv,l,m,i<<1);
}
if(m+1<=jobr)
{
add(jobl,jobr,jobv,m+1,r,i<<1|1);
}
}
up(i);
}
void build(int l,int r,int i)
{
if(l<r)
{
int m=(l+r)>>1;
build(l,m,i<<1);
build(m+1,r,i<<1|1);
}
length[i]=ysort[r+1]-ysort[l];
times[i]=0;
cover[i]=0;
}
int bs(int v,int n)
{
int l=1;
int r=n;
int m;
int ans=0;
while(l<=r)
{
m=(l+r)>>1;
if(ysort[m]>=v)
{
ans=m;
r=m-1;
}
else
{
l=m+1;
}
}
return ans;
}
void solve()
{
int n;
cin>>n;
for(int i=1;i<=n;i++)
{
cin>>rec[i][0]>>rec[i][1]>>rec[i][2]>>rec[i][3];
}
for(int i=1,j=1+n,x1,y1,x2,y2;i<=n;i++,j++)
{
x1=rec[i][0];
y1=rec[i][1];
x2=rec[i][2];
y2=rec[i][3];
//y值离散化
ysort[i]=y1;
ysort[j]=y2;
//增加的事件
line[i][0]=x1;
line[i][1]=y1;
line[i][2]=y2;
line[i][3]=1;
//减少的事件
line[j][0]=x2;
line[j][1]=y1;
line[j][2]=y2;
line[j][3]=-1;
}
//n扩一倍
n<<=1;
//排序去重
sort(ysort.begin()+1,ysort.begin()+n+1);
int m=1;
for(int i=2;i<=n;i++)
{
if(ysort[m]!=ysort[i])
{
ysort[++m]=ysort[i];
}
}
//补一个
ysort[m+1]=ysort[m];
build(1,m,1);
//事件根据x值排序
sort(line.begin()+1,line.begin()+1+n);
ll ans=0;
//扫描线
for(int i=1,pre=0;i<=n;i++)
{
//cover[1]:y轴整个范围上的覆盖长度
ans+=1ll*cover[1]*(line[i][0]-pre);
pre=line[i][0];
add(bs(line[i][1],m),bs(line[i][2],m)-1,line[i][3],1,m,1);
}
cout<<ans<<endl;
}
int main()
{
ios::sync_with_stdio(0);cin.tie(0);cout.tie(0);
int t=1;
//cin>>t;
while(t--)
{
solve();
}
return 0;
}大部分代码还是离散化和预处理的,记得最后再给y值表里多存一个。之后就是用扫描线从左往右扫,那么每次产生的贡献就是y轴整个范围上的覆盖长度,即cover[1]乘以x轴上的变化量,然后再更新线段树即可。
四、矩形周长 Picture
#include <bits/stdc++.h>
using namespace std;
/* /\_/\
* (= ._.)
* / > \>
*/
typedef long long ll;
typedef pair<int,int> pii;
typedef pair<ll,ll>pll;
const int MAXN=2e4+5;
//矩形坐标
vector<vector<int>>rec(MAXN,vector<int>(4));
//矩形两竖直边的事件
vector<vector<int>>line(MAXN,vector<int>(4));
//x和y值的离散化
vector<int>vsort(MAXN);
//总长度
vector<int>length(MAXN<<2);
//覆盖长度
vector<int>cover(MAXN<<2);
//整体覆盖次数
vector<int>times(MAXN<<2);
void up(int i)
{
//被全覆盖
if(times[i]>0)
{
cover[i]=length[i];
}
//没被全覆盖
else
{
cover[i]=cover[i<<1]+cover[i<<1|1];
}
}
void add(int jobl,int jobr,int jobv,int l,int r,int i)
{
if(jobl<=l&&r<=jobr)
{
//增加覆盖次数
times[i]+=jobv;
}
else
{
int m=(l+r)>>1;
if(jobl<=m)
{
add(jobl,jobr,jobv,l,m,i<<1);
}
if(m+1<=jobr)
{
add(jobl,jobr,jobv,m+1,r,i<<1|1);
}
}
up(i);
}
void build(int l,int r,int i)
{
if(l<r)
{
int m=(l+r)>>1;
build(l,m,i<<1);
build(m+1,r,i<<1|1);
}
length[i]=vsort[r+1]-vsort[l];
times[i]=0;
cover[i]=0;
}
int bs(int v,int n)
{
int l=1;
int r=n;
int m;
int ans=0;
while(l<=r)
{
m=(l+r)>>1;
if(vsort[m]>=v)
{
ans=m;
r=m-1;
}
else
{
l=m+1;
}
}
return ans;
}
//排序去重
int prepare(int n)
{
sort(vsort.begin()+1,vsort.begin()+n+1);
int m=1;
for(int i=2;i<=n;i++)
{
if(vsort[m]!=vsort[i])
{
vsort[++m]=vsort[i];
}
}
//补一个
vsort[m+1]=vsort[m];
return m;
}
//扫描
ll scan(int n)
{
int m=prepare(n);
build(1,m,1);
//事件从小到大排序
sort(line.begin()+1,line.begin()+1+n,[](vector<int>&x,vector<int>&y)
{
return x[0]<y[0];
});
ll ans=0;
//扫描线
for(int i=1,pre=0;i<=n;i++)
{
pre=cover[1];
//先施加影响
add(bs(line[i][1],m),bs(line[i][2],m)-1,line[i][3],1,m,1);
//cover[1]:整个范围上的覆盖长度
ans+=1ll*abs(cover[1]-pre);
}
return ans;
}
//竖直扫
ll scanX(int n)
{
for(int i=1,j=1+n,x1,y1,x2,y2;i<=n;i++,j++)
{
x1=rec[i][0];
y1=rec[i][1];
x2=rec[i][2];
y2=rec[i][3];
//X值离散化
vsort[i]=x1;
vsort[j]=x2;
//增加的事件
line[i][0]=y1;
line[i][1]=x1;
line[i][2]=x2;
line[i][3]=1;
//减少的事件
line[j][0]=y2;
line[j][1]=x1;
line[j][2]=x2;
line[j][3]=-1;
}
return scan(n<<1);
}
//水平扫
ll scanY(int n)
{
for(int i=1,j=1+n,x1,y1,x2,y2;i<=n;i++,j++)
{
x1=rec[i][0];
y1=rec[i][1];
x2=rec[i][2];
y2=rec[i][3];
//y值离散化
vsort[i]=y1;
vsort[j]=y2;
//增加的事件
line[i][0]=x1;
line[i][1]=y1;
line[i][2]=y2;
line[i][3]=1;
//减少的事件
line[j][0]=x2;
line[j][1]=y1;
line[j][2]=y2;
line[j][3]=-1;
}
return scan(n<<1);
}
void solve()
{
int n;
cin>>n;
for(int i=1;i<=n;i++)
{
cin>>rec[i][0]>>rec[i][1]>>rec[i][2]>>rec[i][3];
}
cout<<scanX(n)+scanY(n)<<endl;
}
int main()
{
ios::sync_with_stdio(0);cin.tie(0);cout.tie(0);
int t=1;
//cin>>t;
while(t--)
{
solve();
}
return 0;
}如果上个题明白了,这个题就很好懂了。因为上个题只考虑了在y方向上的边长,而这个题是统计周长,那么x方向和y方向上的边长就都要算,所以就可以用扫描线在x和y方向上都扫一次。此外,在这个题里,当每个事件来临时,由于这条边直接就会产生影响,所以需要先记录前一次整体的长度,再施加影响,最后才结算答案,统计当前和前一次长度的变化值。
总结
加快速度,加油!!
END

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 12
12 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)