视觉识别及抓取——ROS2焊接机械臂(六)
本文介绍了基于ROS2和MoveIt的机械臂末端固定点运动控制方法。首先通过C++代码创建move_to_pose节点,使用MoveGroupInterface设置目标位姿并规划运动轨迹。然后详细说明了工作空间配置流程,包括创建C++包、编写CMakeLists.txt文件、配置Launch文件以加载机器人参数。最后展示了如何编译运行程序,实现机械臂从当前位置移动到指定目标点的完整过程。文中还提供
这次,我们根据配置好的工作空间,进行视觉的识别及抓取,如果需要上次配置的工作空间,可以后台私信我。
文章目录
一,末端移动到固定点
流程:
- (1)写入位置参数(单位:米)和 姿态参数(四元数表示)
- (2)调用 move_group_interface.plan(my_plan) 方法
- 功能:生成从当前位置到目标位置的安全运动轨迹
- (3)规划成功后调用 move_group_interface.execute(my_plan)
系统将:- 发送轨迹指令给控制器
- 驱动 Gazebo 仿真环境中的关节电机运动
1.新建C++工作空间
ros2 pkg create --build-type ament_cmake --dependencies rclcpp moveit_ros_planning_interface geometry_msgs moveit_msgs --destination-directory src luck_examples
写cpp文件(里面可修改目标点):
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <geometry_msgs/msg/pose.hpp>
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("move_to_pose_node");
// 使用 "test_group" 规划组
static const std::string PLANNING_GROUP = "test_group";
// 创建 MoveGroupInterface
using moveit::planning_interface::MoveGroupInterface;
auto move_group_interface = MoveGroupInterface(node, PLANNING_GROUP);
// 获取当前位姿作为参考 (可选)
// geometry_msgs::msg::Pose current_pose = move_group_interface.getCurrentPose().pose;
// RCLCPP_INFO(node->get_logger(), "Current Pose: x=%f, y=%f, z=%f",
// current_pose.position.x, current_pose.position.y, current_pose.position.z);
// 设置目标位姿
geometry_msgs::msg::Pose target_pose;
target_pose.orientation.w = 1.0;
target_pose.position.x = 0.3;
target_pose.position.y = 0.0;
target_pose.position.z = 0.5;
move_group_interface.setPoseTarget(target_pose);
// 创建规划
moveit::planning_interface::MoveGroupInterface::Plan my_plan;
bool success = (move_group_interface.plan(my_plan) == moveit::core::MoveItErrorCode::SUCCESS);
if (success)
{
RCLCPP_INFO(node->get_logger(), "Planning successful, executing...");
move_group_interface.execute(my_plan);
}
else
{
RCLCPP_ERROR(node->get_logger(), "Planning failed!");
}
rclcpp::shutdown();
return 0;
}
修改CMakelists.txt文件
cmake_minimum_required(VERSION 3.8)
project(luck_examples)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(moveit_msgs REQUIRED)
add_executable(move_to_pose src/move_to_pose.cpp)
ament_target_dependencies(move_to_pose
rclcpp
moveit_ros_planning_interface
geometry_msgs
moveit_msgs
)
install(TARGETS move_to_pose
DESTINATION lib/${PROJECT_NAME}
)
install(DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
配置 (Launch 文件)
为什么不能直接 ros2 run 而需要 ros2 launch?
参数加载: MoveIt 的节点(即我们的 C++ 程序)启动时,必须知道机器人的身体结构(URDF)和语义信息(SRDF)。
move_to_pose.launch.py 的作用就是先读取这些配置文件,把它们变成参数传给节点,节点才能正常工作。
创建launch文件(move_to_pose.launch.py)
from launch import LaunchDescription
from launch_ros.actions import Node
from moveit_configs_utils import MoveItConfigsBuilder
def generate_launch_description():
moveit_config = MoveItConfigsBuilder("luck_description", package_name="luck_robot").to_moveit_configs()
return LaunchDescription([
Node(
package="luck_examples",
executable="move_to_pose",
name="move_to_pose_node",
output="screen",
parameters=[
moveit_config.robot_description,
moveit_config.robot_description_semantic,
moveit_config.robot_description_kinematics,
{"use_sim_time": True},
],
)
])
重新编译:
因为是 C++ 代码,修改后必须编译才能生效。
colcon build --packages-select luck_examples
source install/setup.bash
运行:
在第一个终端运行总启动文件后,再运行这个launch文件
ros2 launch luck_gazebo gazebo_moveit.launch.py
ros2 launch luck_examples move_to_pose.launch.py
效果图如下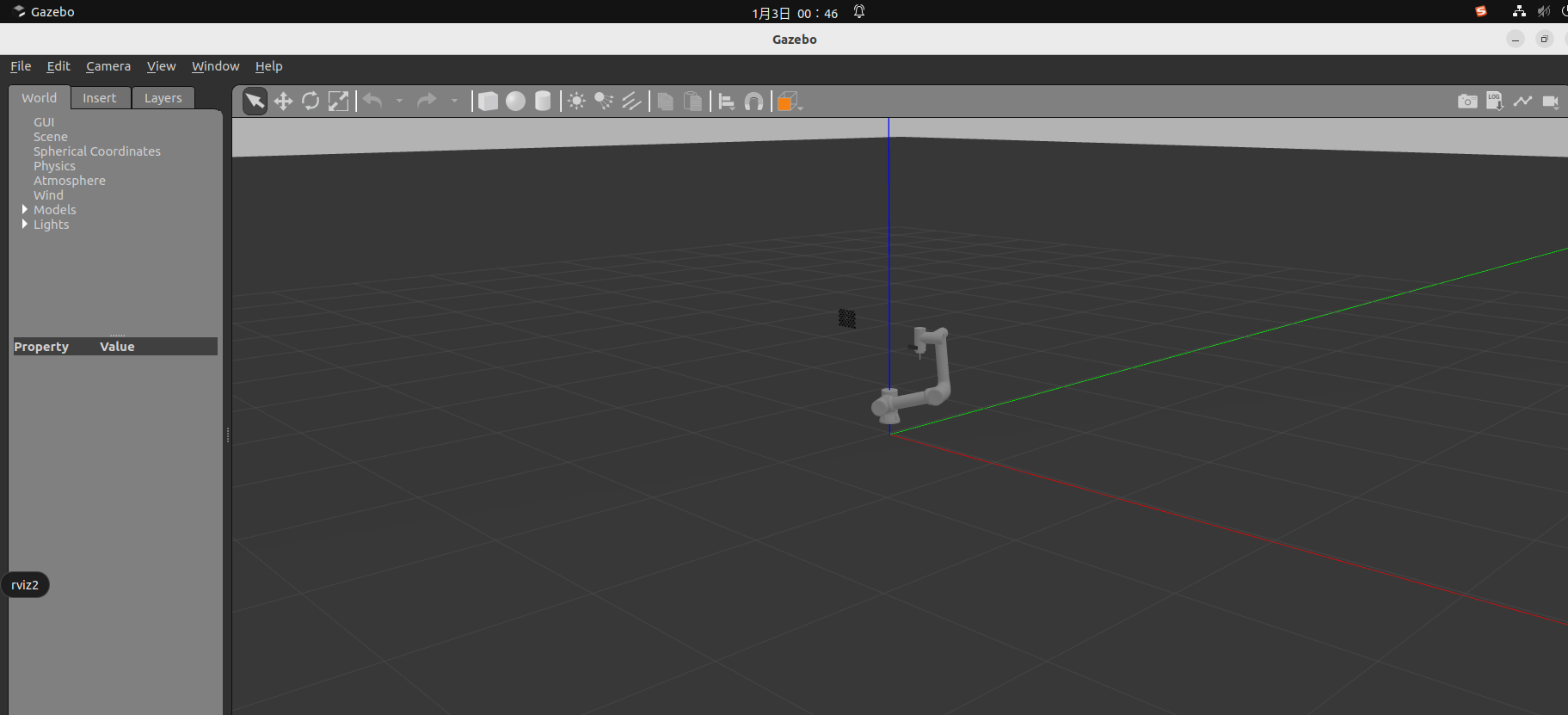
二,配置红色目标板
2.1在scripts文件夹下配置aruco.material文件。
(可以根据自己电脑gazebo文件夹路径放,不一定和我这个一样,可以自己找一下)
cd /usr/share/gazebo-11/media/materials/scripts/
sudo nano aruco.material
将下面内容放进去,并保存
// /usr/share/gazebo-9/media/materials/scripts/aruco.material
material Gazebo/aruco-36
{
technique
{
pass
{
lighting on
shading gouraud
// 环境光和漫反射设置为白色,确保纹理不暗
ambient 1.0 1.0 1.0 1.0
diffuse 1.0 1.0 1.0 1.0
specular 0.2 0.2 0.2 1.0 50.0
texture_unit
{
// 使用您的图片文件名
texture pioneerBody.jpg
// 修正拼写错误:anistropic → anisotropic
filtering anisotropic
max_anisotropy 16
// 添加纹理缩放设置
scale 1.0 1.0
// 确保纹理重复
scroll 0 0
wave_xform scroll sine 0 0 0 0
}
}
}
}
对应的就是这个图片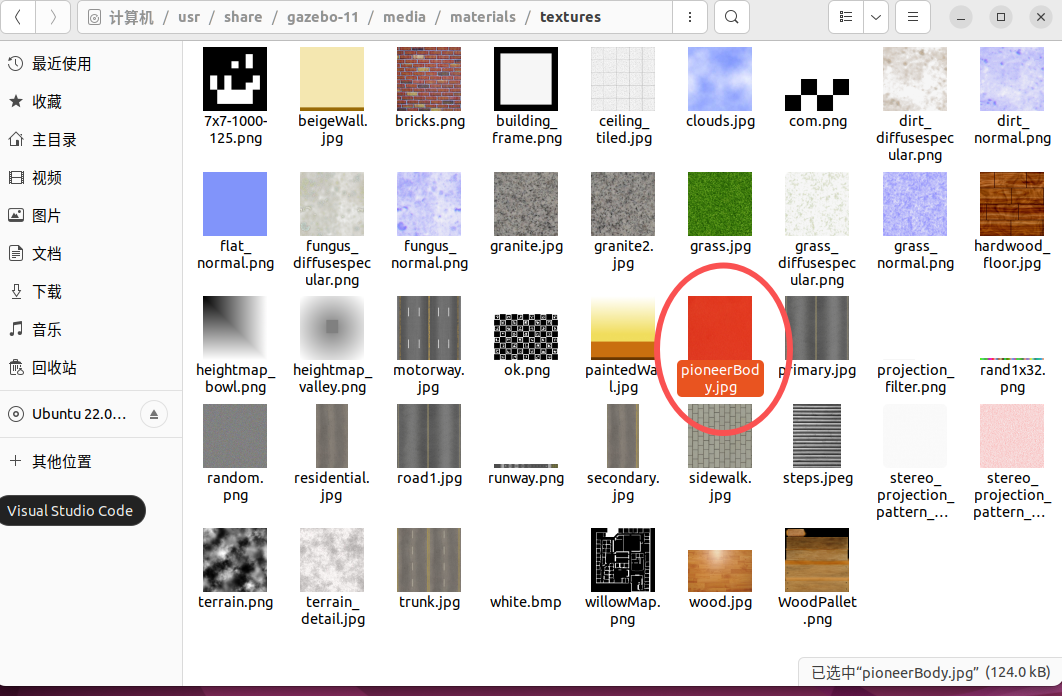
2.2将目标板添加到rviz和gazebo中
在我的机械臂urdf文件(src/luck_description/urdf/luck_description.urdf)最后添加下面内容,可以加载到rviz2中
<!-- 在world上直接添加标定板 -->
<link name="calibration_board">
<visual name="board_visual">
<geometry>
<box size="0.165 0.001 0.12"/> <!-- 薄板 -->
</geometry>
</visual>
<!-- 可选的碰撞体 -->
<collision name="board_collision">
<geometry>
<box size="0.165 0.001 0.12"/>
</geometry>
</collision>
</link>
<!-- 将标定板固定在世界坐标系中 -->
<joint name="world_to_board_joint" type="fixed">
<parent link="world"/>
<child link="calibration_board"/>
<!-- 关键:设置标定板在世界中的位置 -->
<origin xyz="0 -0.4 0.4" rpy="1.5708 0 0"/> <!-- 在工作空间中的固定位置 -->
</joint>
<!-- Gazebo配置:为标定板应用ArUco材质 -->
<gazebo reference="calibration_board">
<material>Gazebo/aruco-36</material>
<static>true</static> <!-- 标记为静态,不会掉落 -->
</gazebo>
创建src/luck_gazebo/models/calibration_board/calibration_board.sdf文件,可以导入gazebo。
<?xml version="1.0" ?>
<sdf version="1.6">
<model name="calibration_board">
<static>true</static>
<link name="calibration_board">
<!-- 位姿:与之前 URDF 中 world_to_board_joint 的 origin 保持一致 -->
<pose>0 -0.4 0.4 1.5708 0 0</pose>
<visual name="board_visual">
<geometry>
<box>
<size>0.165 0.001 0.12</size>
</box>
</geometry>
<material>
<!-- 使用 Gazebo 自带的 aruco 材质;若缺失可改为其它材质 -->
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/aruco-36</name>
</script>
</material>
</visual>
<collision name="board_collision">
<geometry>
<box>
<size>0.1 0.001 0.1</size>
</box>
</geometry>
</collision>
</link>
</model>
</sdf>
修改总launch文件(添加启动文件,和回调文件),总的文件如下
#!/usr/bin/env python3
"""
完整的Gazebo + MoveIt + RViz联合调试Launch文件
"""
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess, TimerAction, IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import PathJoinSubstitution
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from ament_index_python.packages import get_package_share_directory
from moveit_configs_utils import MoveItConfigsBuilder
import xacro
def generate_launch_description():
# 包路径
pkg_luck_robot = get_package_share_directory('luck_robot')
pkg_luck_gazebo = get_package_share_directory('luck_gazebo')
pkg_luck_description = get_package_share_directory('luck_description')
calibration_board_model = os.path.join(
pkg_luck_gazebo, 'models', 'calibration_board', 'calibration_board.sdf'
)
# 若未安装到 install/share,回退到源码路径
if not os.path.exists(calibration_board_model):
ws_root = os.path.abspath(os.path.join(pkg_luck_gazebo, '..', '..', '..', '..'))
calibration_board_model = os.path.join(
ws_root, 'src', 'luck_gazebo', 'models', 'calibration_board', 'calibration_board.sdf'
)
# 控制器配置
controller_config = os.path.join(pkg_luck_gazebo, 'config', 'controllers.yaml')
# MoveIt配置
moveit_config = MoveItConfigsBuilder("luck_description", package_name="luck_robot").to_moveit_configs()
# 处理xacro生成URDF - 使用命令行参数方式
initial_positions_file = os.path.join(pkg_luck_robot, 'config', 'initial_positions.yaml')
# 直接调用xacro命令处理文件
import subprocess
xacro_file = os.path.join(pkg_luck_robot, 'config', 'luck_description.urdf.xacro')
result = subprocess.run(
['xacro', xacro_file,
f'initial_positions_file:={initial_positions_file}',
'use_sim:=true'],
capture_output=True,
text=True,
check=True
)
robot_description_content = result.stdout
# 动态注入controller配置到Gazebo插件
robot_description_content = robot_description_content.replace(
'<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">\n </plugin>',
f'<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">\n <parameters>{controller_config}</parameters>\n </plugin>'
)
# 替换mesh路径为绝对路径
robot_description_content = robot_description_content.replace(
'package://luck_description',
f'file://{pkg_luck_description}'
)
pkg_realsense_description = get_package_share_directory('realsense2_description')
robot_description_content = robot_description_content.replace(
'package://realsense2_description',
f'file://{pkg_realsense_description}'
)
# Robot State Publisher
robot_state_publisher = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{
'robot_description': robot_description_content,
'use_sim_time': True
}]
)
# 启动Gazebo
gazebo = ExecuteProcess(
cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'],
output='screen'
)
# Spawn机器人
spawn_entity = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=[
'-topic', 'robot_description',
'-entity', 'luck_robot',
'-x', '0',
'-y', '0',
'-z', '0.1'
],
output='screen'
)
# Spawn标定板(静态)
spawn_calibration_board = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=[
'-file', calibration_board_model,
'-entity', 'calibration_board'
],
output='screen'
)
# 加载并激活joint_state_broadcaster
joint_state_broadcaster_spawner = Node(
package="controller_manager",
executable="spawner",
arguments=["joint_state_broadcaster"],
output='screen'
)
# 加载并激活test_group_controller
test_group_controller_spawner = Node(
package="controller_manager",
executable="spawner",
arguments=["test_group_controller"],
output='screen'
)
# MoveGroup节点 - 增加trajectory execution参数
trajectory_execution_params = {
'moveit_manage_controllers': True,
'trajectory_execution.allowed_execution_duration_scaling': 2.0,
'trajectory_execution.allowed_goal_duration_margin': 5.0,
'trajectory_execution.allowed_start_tolerance': 0.5, # 增大到0.5弧度
'trajectory_execution.execution_duration_monitoring': False,
}
move_group_params = [
moveit_config.to_dict(),
trajectory_execution_params,
{'use_sim_time': True}
]
move_group_node = Node(
package='moveit_ros_move_group',
executable='move_group',
output='screen',
parameters=move_group_params,
)
# RViz配置 - 使用实际路径而不是Substitution
rviz_config_file = os.path.join(pkg_luck_robot, "config", "moveit.rviz")
# RViz节点
rviz_node = Node(
package="rviz2",
executable="rviz2",
name="rviz2",
output="screen", # 改为screen以便查看错误信息
arguments=["-d", rviz_config_file],
parameters=[
{"robot_description": robot_description_content}, # 添加robot_description
moveit_config.robot_description_semantic,
moveit_config.robot_description_kinematics,
moveit_config.planning_pipelines,
moveit_config.joint_limits,
{"use_sim_time": True},
],
)
return LaunchDescription([
# 1. 启动Gazebo和robot_state_publisher
robot_state_publisher,
gazebo,
# 2. 8秒后spawn机器人
TimerAction(
period=8.0,
actions=[spawn_entity]
),
# 2.5 6秒后spawn标定板
TimerAction(
period=6.0,
actions=[spawn_calibration_board]
),
# 3. 10秒后加载控制器(关键:防止机械臂下落)
TimerAction(
period=10.0,
actions=[joint_state_broadcaster_spawner]
),
# 4. 11秒后激活轨迹控制器
TimerAction(
period=11.0,
actions=[test_group_controller_spawner]
),
# 5. 12秒后启动MoveGroup(给控制器充分时间稳定)
TimerAction(
period=12.0,
actions=[move_group_node]
),
# 6. 17秒后启动RViz
TimerAction(
period=17.0,
actions=[rviz_node]
),
])
然后进行colcon build和source,就可以看到gazebo中有红色板了。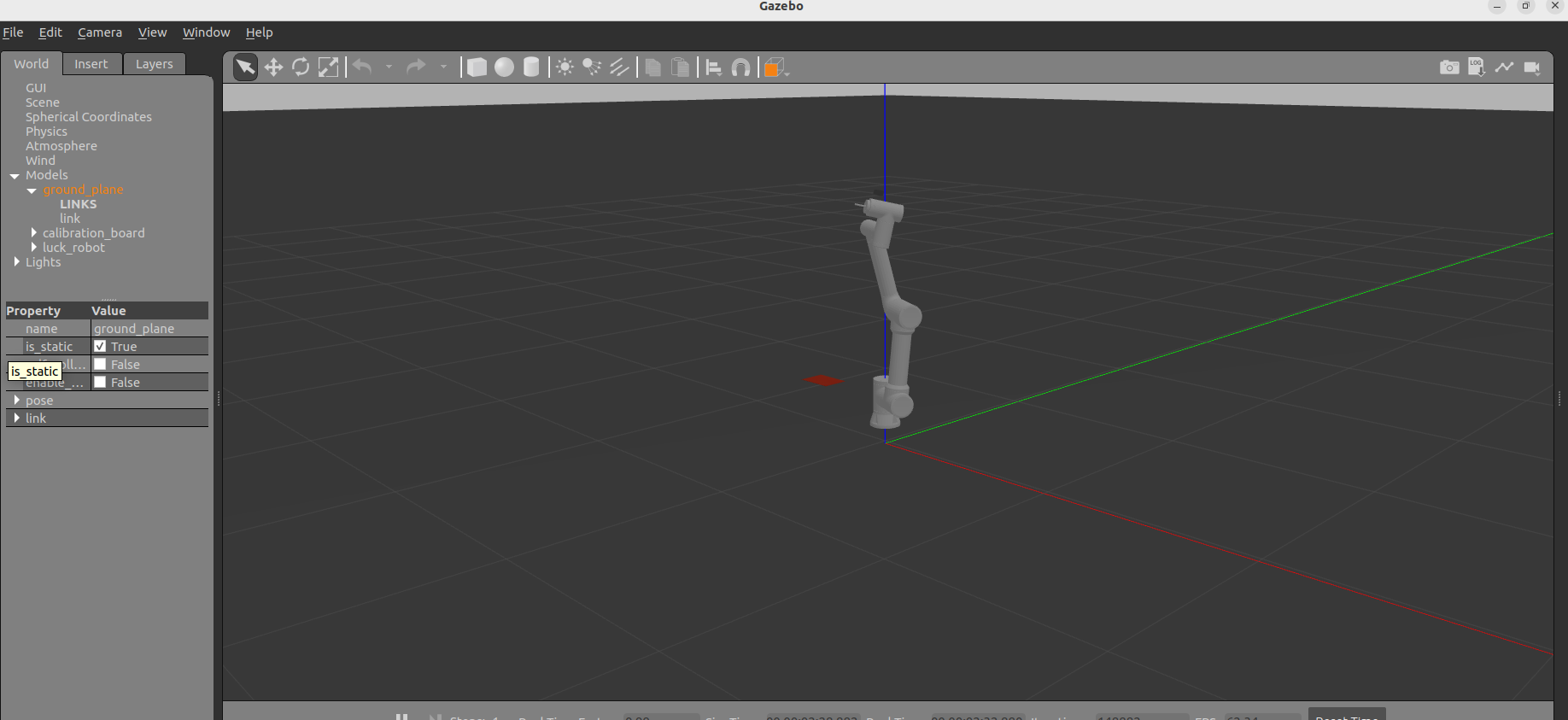
三,视觉识别位置并运动
先让机械臂运动到特定位置,以便于摄像头能看到红板,然后使用坐标变换计算出目红板中心点的实际空间位置(有一点点偏差),并让机械臂运动到上方20cm处。
move_to_pose.cpp文件修改
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <geometry_msgs/msg/pose.hpp>
#include <sensor_msgs/msg/image.hpp>
#include <sensor_msgs/msg/camera_info.hpp>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <tf2_ros/transform_listener.h>
#include <tf2_ros/buffer.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
#include <tf2/LinearMath/Transform.h>
#include <tf2/LinearMath/Vector3.h>
#include <thread>
#include <atomic>
class ImageProcessor : public rclcpp::Node
{
public:
ImageProcessor() : Node("move_and_detect_node")
{
tf_buffer_ = std::make_unique<tf2_ros::Buffer>(this->get_clock());
tf_listener_ = std::make_shared<tf2_ros::TransformListener>(*tf_buffer_);
}
void start_processing()
{
// 订阅相机信息 (只订阅一次)
camera_info_sub_ = this->create_subscription<sensor_msgs::msg::CameraInfo>(
"/camera/camera_sensor/camera_info", 10,
[this](const sensor_msgs::msg::CameraInfo::SharedPtr msg) {
if (!has_camera_info_) {
fx_ = msg->k[0];
fy_ = msg->k[4];
cx_ = msg->k[2];
cy_ = msg->k[5];
has_camera_info_ = true;
RCLCPP_INFO(this->get_logger(), "获取到相机内参: fx=%.2f, fy=%.2f, cx=%.2f, cy=%.2f", fx_, fy_, cx_, cy_);
}
});
// 订阅图像话题
image_sub_ = this->create_subscription<sensor_msgs::msg::Image>(
"/camera/camera_sensor/image_raw", 10,
std::bind(&ImageProcessor::image_callback, this, std::placeholders::_1));
RCLCPP_INFO(this->get_logger(), "视觉节点已启动,等待图像...");
}
bool is_done() const { return done_; }
// 获取计算出的目标位置
bool get_target_pose(geometry_msgs::msg::Pose& pose) {
if (done_) {
pose = target_pose_;
return true;
}
return false;
}
private:
void image_callback(const sensor_msgs::msg::Image::SharedPtr msg)
{
if (done_ || !has_camera_info_) return;
try
{
cv::Mat frame = cv_bridge::toCvCopy(msg, "bgr8")->image;
cv::Mat hsv;
cv::cvtColor(frame, hsv, cv::COLOR_BGR2HSV);
cv::Mat mask1, mask2, mask;
cv::inRange(hsv, cv::Scalar(0, 43, 46), cv::Scalar(10, 255, 255), mask1);
cv::inRange(hsv, cv::Scalar(156, 43, 46), cv::Scalar(180, 255, 255), mask2);
mask = mask1 | mask2;
std::vector<std::vector<cv::Point>> contours;
cv::findContours(mask, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);
if (!contours.empty())
{
auto largest_contour = std::max_element(contours.begin(), contours.end(),
[](const std::vector<cv::Point>& a, const std::vector<cv::Point>& b) {
return cv::contourArea(a) < cv::contourArea(b);
});
if (cv::contourArea(*largest_contour) > 500)
{
cv::Rect rect = cv::boundingRect(*largest_contour);
double u = rect.x + rect.width / 2.0;
double v = rect.y + rect.height / 2.0;
// 输出像素坐标
RCLCPP_INFO(this->get_logger(), ">>> 红板中心像素坐标: (u=%.1f, v=%.1f) <<<", u, v);
// ---------------------------------------------------------
// 坐标计算核心逻辑 (修正版)
// 问题背景:
// 1. Gazebo仿真中,相机传感器挂载在 'camera_link' (物理位置)。
// 2. 图像数据遵循 Optical Frame 定义 (Z轴向前),对应的TF帧是 'camera_color_optical_frame'。
// 3. 两者之间存在约1.5cm的物理偏移。
//
// 解决方案: 混合使用两个Frame
// - 原点 (Origin): 使用 'camera_link' 的位置,消除平移误差。
// - 方向 (Direction): 使用 'camera_color_optical_frame' 的旋转,保证视轴方向正确。
// ---------------------------------------------------------
std::string optical_frame = "camera_color_optical_frame"; // 用于方向
std::string sensor_frame = "camera_link"; // 用于原点
// 1. 获取TF变换
geometry_msgs::msg::TransformStamped tf_optical_msg, tf_sensor_msg;
try {
// 获取方向变换 (Base -> Optical)
tf_optical_msg = tf_buffer_->lookupTransform("base_link", optical_frame, tf2::TimePointZero);
// 获取位置变换 (Base -> Sensor)
tf_sensor_msg = tf_buffer_->lookupTransform("base_link", sensor_frame, tf2::TimePointZero);
} catch (tf2::TransformException &ex) {
RCLCPP_WARN(this->get_logger(), "TF变换获取失败: %s", ex.what());
return;
}
// 2. 转换数据类型
tf2::Transform transform_optical, transform_sensor;
tf2::fromMsg(tf_optical_msg.transform, transform_optical);
tf2::fromMsg(tf_sensor_msg.transform, transform_sensor);
// 3. 构建射线
// 射线原点: 使用物理传感器的位置
tf2::Vector3 cam_origin = transform_sensor.getOrigin();
// 射线方向: 在Optical Frame中构建向量 (x, y, 1.0),然后旋转到世界坐标系
// P_pixel(u,v) -> P_optical(x,y,1)
double ray_x = (u - cx_) / fx_;
double ray_y = (v - cy_) / fy_;
double ray_z = 1.0;
tf2::Vector3 ray_optical(ray_x, ray_y, ray_z);
// 应用旋转 (只旋转,不平移)
tf2::Vector3 ray_world = transform_optical.getBasis() * ray_optical;
ray_world.normalize(); // 归一化方向向量
RCLCPP_INFO(this->get_logger(), "相机位置 (World): X=%.3f, Y=%.3f, Z=%.3f",
cam_origin.x(), cam_origin.y(), cam_origin.z());
RCLCPP_INFO(this->get_logger(), "射线方向 (World): X=%.3f, Y=%.3f, Z=%.3f",
ray_world.x(), ray_world.y(), ray_world.z());
// 4. 射线-平面求交 (计算落地坐标)
double object_z = 0.4; // 目标平面高度 (红板高度)
// 确保射线是指向下的 (Z分量为负) 且不平行于地面
if (ray_world.z() < -1e-6) {
// t = (Z_plane - Z_origin) / Z_dir
double t = (object_z - cam_origin.z()) / ray_world.z();
if (t > 0) {
tf2::Vector3 intersection = cam_origin + (ray_world * t);
RCLCPP_INFO(this->get_logger(), ">>> 推算的3D坐标: X=%.3f, Y=%.3f, Z=%.3f <<<",
intersection.x(), intersection.y(), intersection.z());
// 设置目标位置 (保持Z轴悬停高度)
target_pose_.position.x = intersection.x();
target_pose_.position.y = intersection.y() + 0.015; // 手动补偿RGB传感器物理偏移 (1.5cm)
target_pose_.position.z = 0.6; // 移动到物体上方 (0.4 + 0.2)
RCLCPP_INFO(this->get_logger(), ">>> 修正后目标坐标: X=%.3f, Y=%.3f, Z=%.3f <<<",
target_pose_.position.x, target_pose_.position.y, target_pose_.position.z);
// 保持末端垂直向下
target_pose_.orientation.w = 1.0;
target_pose_.orientation.x = 0.0;
target_pose_.orientation.y = 0.0;
target_pose_.orientation.z = 0.0;
done_ = true;
}
} else {
RCLCPP_WARN(this->get_logger(), "射线未指向下方或平行于地面,无法计算交点。");
}
}
}
}
catch (cv_bridge::Exception& e)
{
RCLCPP_ERROR(this->get_logger(), "cv_bridge exception: %s", e.what());
}
}
rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr image_sub_;
rclcpp::Subscription<sensor_msgs::msg::CameraInfo>::SharedPtr camera_info_sub_;
std::unique_ptr<tf2_ros::Buffer> tf_buffer_;
std::shared_ptr<tf2_ros::TransformListener> tf_listener_;
std::atomic<bool> done_{false};
bool has_camera_info_{false};
double fx_, fy_, cx_, cy_;
geometry_msgs::msg::Pose target_pose_;
};
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<ImageProcessor>();
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(node);
std::thread spinner([&executor]() { executor.spin(); });
static const std::string PLANNING_GROUP = "test_group";
using moveit::planning_interface::MoveGroupInterface;
auto move_group_interface = MoveGroupInterface(node, PLANNING_GROUP);
// 1. 先移动到观测位置
geometry_msgs::msg::Pose observe_pose;
observe_pose.orientation.w = 1.0;
observe_pose.orientation.x = 0.0;
observe_pose.orientation.y = 0.0;
observe_pose.orientation.z = 0.0;
observe_pose.position.x = 0.0;
observe_pose.position.y = -0.4;
observe_pose.position.z = 0.7;
move_group_interface.setPoseTarget(observe_pose);
RCLCPP_INFO(node->get_logger(), "正在移动到观测位置 (0, -0.4, 0.7)...");
moveit::planning_interface::MoveGroupInterface::Plan my_plan;
if (move_group_interface.plan(my_plan) == moveit::core::MoveItErrorCode::SUCCESS)
{
move_group_interface.execute(my_plan);
// 2. 等待8秒
RCLCPP_INFO(node->get_logger(), "到达观测位置,等待2秒...");
std::this_thread::sleep_for(std::chrono::seconds(2));
// 3. 开启视觉处理
RCLCPP_INFO(node->get_logger(), "开始视觉识别...");
node->start_processing();
// 等待识别结果
int timeout = 200; // 20s
while (!node->is_done() && timeout > 0 && rclcpp::ok())
{
std::this_thread::sleep_for(std::chrono::milliseconds(100));
timeout--;
}
if (node->is_done()) {
geometry_msgs::msg::Pose target_pose;
node->get_target_pose(target_pose);
RCLCPP_INFO(node->get_logger(), "视觉定位成功,正在前往目标...");
RCLCPP_INFO(node->get_logger(), "最终目标坐标: X=%.3f, Y=%.3f, Z=%.3f",
target_pose.position.x, target_pose.position.y, target_pose.position.z);
// 执行移动
move_group_interface.setPoseTarget(target_pose);
if (move_group_interface.plan(my_plan) == moveit::core::MoveItErrorCode::SUCCESS) {
move_group_interface.execute(my_plan);
} else {
RCLCPP_ERROR(node->get_logger(), "目标位置规划失败!");
}
} else {
RCLCPP_WARN(node->get_logger(), "超时: 未能定位到红色目标。");
}
}
else
{
RCLCPP_ERROR(node->get_logger(), "观测位置规划失败!");
}
executor.cancel();
spinner.join();
rclcpp::shutdown();
return 0;
}
重新编译:
修改后必须编译才能生效
colcon build --packages-select luck_examples
source install/setup.bash
运行:
在第一个终端运行总启动文件后,再运行这个launch文件
ros2 launch luck_gazebo gazebo_moveit.launch.py
ros2 launch luck_examples move_to_pose.launch.py
效果图如下:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 36
36 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)