计算机三级-嵌入式组-考点汇总-嵌入式处理芯片
计算机三级考点汇总:
三、嵌入式处理芯片
1.嵌入式芯片的硬件系统
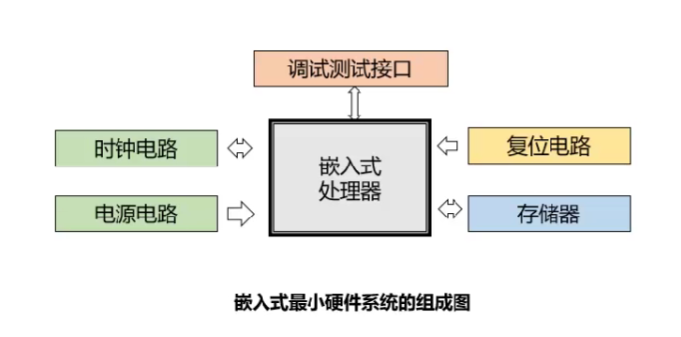
1-1嵌入式最小硬件系统
1.电源电路 2.时钟电路 3.复位电路 4.JTAG测试接口
常用电源模块:交流变直流(AC-DC)模块、直流到直流(DC-DC)模块、低压差稳压器(LDO)模块
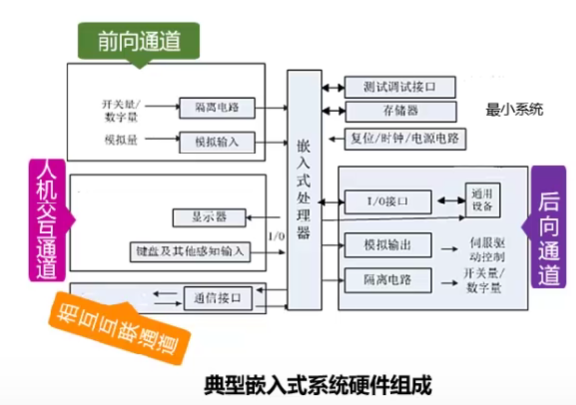
1-2.基于ARM的典型嵌入式应用系统硬件组成
1.前向通道:输入接口,包括传感器、信号调理电路、A/D转化器等
2.后向通道:输出接口,包括模拟输出接口和数字输出接口
3.人机交互通道:包括键盘、触摸屏及LED屏幕等
4.相互互联通道:包括RS-232/RS-485串行通信接口、CAN通信接口、以太网通信接口、USB通信接口等
2. ARM的AMBA总线体系结构及标准
AMBA总线是ARM公司公布的总线协议,用于连接和管理片上系统(SoC)中功能模块。分别为系统总线和外围总线。
2-1.发展及版本
(1)AMBA1(1995年):ARM7
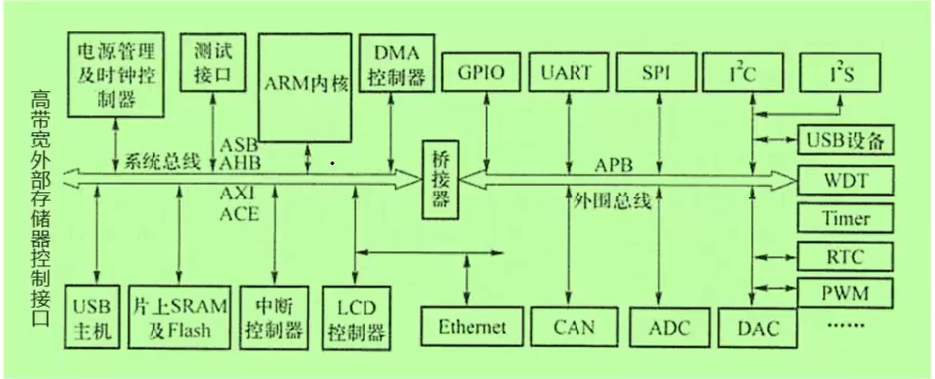
系统总线为先进系统总线(ASB),用于连接高性能系统模块。外围总线为先进外围总线(APB),支持低性能的外围接口。ASB和APB之间通过桥接器相连。
(2)AMBA2(1999年):ARM9/ARM10/ARM CortexM
增强了AMBA的性能,定义了两种高性能的总线规范以及测试方法。系统总线为先进高性能总线(AHB),用于连接高性能系统组件或高带宽组件。外围总线变成APB2,性能增强。
(3)AMBA3(2003年):
引进可扩展接口,总线标准: 包括AXI、ATB、AHB-Lite及APB3。
(4)AMBA4:
新增5个接口协议: ACE、ACE-Lite、AXI4、AXI4-Lite及AXI4-Stream。增强了数据传输功能,减少了信号路由开销。
2-2.基于AMBA总线的典型ARM片上系统
基于AMBA总线的处理器使用系统总线和外围总线构成,连接高速系统组件和低速外围组件。
总线组合:
- AMBA1: ASB+APB
- AMBA2: AHB+APB
- AMBA3: AHB+ATB+AXI+APB
- AMBA4: ACE+ATB+AXI(包括-Lite,-Stream)+APB
3.基于ARM内核的嵌入式芯片的硬件组成
3-1. 存储器及控制器
在ARM处理芯片内部硬件中,除ARM内核外,存储器及其管理组件是最重要的组件。功能是管理和控制片内的SRAM、ROM和Flash ROM,以及通过外部存储器控制器对外部扩展存储器如Flash存储器及DRAM进行管理与控制。
存储器的类型与用途
片内存储器:
- 程序存储器: 主要采用Flash ROM,用于存储程序。
- 数据存储器: 可采用SRAM,以及DDR或DDR2或普通的DRAM,用于存储数据。
外部存储器扩展:
- 高带宽外部存储器控制接口: 为外部存储器扩展提供了接口,可扩展程序存储器及数据存储器。
- 连接方式: 与AMBA的系统总线部分相连,但并非完全连接,而是部分相连。
存储器与控制器的细节与注意事项
- 存储形式选择: 数据存储器采用SRAM、DDR等不同类型的存储器时,需考虑价格因素。SRAM价格稍高,而DRAM价格相对较低。
- 外部存储器扩展的灵活性: 通过高带宽外部存储器控制接口,可以灵活地扩展存储器的容量和类型。
- 系统总线连接: 外部存储器控制器与AMBA的系统总线是部分相连,这一点在理解和应用时需特别注意。
3-2. 中断控制器
中断控制器负责对其他硬件组件的中断请求进行管理和控制,一般采用向量中断(VIC)或嵌套向量中断(NVIC)。处理中断有两种形式,分别为标准的中断控制器和向量中断控制器。
1)标准中断控制器
标准中断控制器负责处理外设设备的中断请求。当外设设备需要服务时,发送一个中断请求信号给处理器核。中断处理程序通过读取中断控制器中与各设备对应的表示中断请求的寄存器内容,判断哪个设备需要服务。
2)VIC(向量中断控制器)
比标准中断控制器更强大,区分中断的优先级,简化了判断中断源的过程。只有当一个新的中断其优先级高于当前正在执行的中断处理优先级时,VIC才向内核提出中断请求。
3)NVIC(嵌套向量中断控制器)
不仅支持中断优先级,还允许中断的嵌套。即高优先级中断可以打断低优先级中断的处理,等到高优先级处理完后,再接着进行低优先级处理。Cortex-M系列处理器支持NVIC,允许中断的嵌套处理。
3-3. DMA控制器
DMA控制器(直接存储器访问控制器)是ARM处理芯片内部的一种硬件组件。可将数据块从外设传输至内存、从内存传输至外设或从内存传输至内存,数据传输过程中不需要CPU参与。优势为降低处理器的负荷,当CPU设为低功率状态时,使用DMA控制器传输数据可降低系统功耗。
当ARM与串行通信端口、USB接口、CAN接口、以太网接口等通道进行交流时,既可由ARM内核控制数据传输,也可通过DMA控制器控制数据传输。如果数据量较小,可由CPU直接传输;如果数据量较大,一般使用DMA控制器进行传输,以减少能耗并释放CPU。
3-4. 电源管理与时钟控制器
1)电源管理
- 正常工作模式: ARM处理芯片的正常工作状态,所有组件均处于活跃状态。
- 慢时钟模式: 降低时钟频率,以减缓组件的工作速度,从而降低功耗。
- 空闲模式: 部分组件进入休眠状态,但核心部分仍保持活跃,以便快速响应。
- 掉电模式: 进一步降低功耗,仅保留必要的组件供电,以维持基本功能。
- 休眠模式: 大部分组件关闭,仅保留少量关键组件供电,以便快速恢复。
- 深度休眠模式: 功耗最低,几乎所有组件都关闭,需要较长时间才能恢复。
2)时钟控制器
时钟信号是ARM芯片定时的关键,用于同步各组件的操作。时钟控制器负责时钟的分配,根据组件的需求提供不同频率的时钟信号以优化性能和功耗。
- 快速时钟: 供快速通道使用,如存储器时钟,确保高速数据传输。
- 慢速时钟: 经过分频后得到,供APB总线上的接口使用,满足低速同步需求。
3-5. GPIO
GPIO(General Purpose Input Output)即通用输入/输出端口,作为输入时具有缓冲功能,作为输出时具有锁存功能,也可以作为双向I/O使用。GPIO引脚一般是三态的,即具有0态、1态和高阻状态。
在ARM处理芯片中,GPIO引脚通常是多功能使用的,目的是减少芯片引脚数,缩小PCB面积,以减少功耗。引脚可能具有双功能、三功能甚至四功能,具体功能由厂家定义。通常用GPIO引脚构建简单键盘。
3-6. 定时计数组件
ARM芯片内部有多个定时计数组件,负责对特定输入的时钟通过分频后接入计时器进行+1或-1计算,当达到预定时间时,会触发一个中断,由中断来处理相关的事务。主要包括以下4个:
1)看门狗定时器(WDT)
使系统定时复位,保证系统稳定运行。当CPU出错时,WDT能检测并使系统复位。类似于系统的“自愈”机制,确保设备能7×24小时不间断工作。
2)通用定时器(Timer)
用于硬件或软件的定时,如每隔一定时间执行特定任务(如温度传感器每隔十分钟上报一次温度)。广泛应用于需要周期性操作的场景。
3)实时时钟(RTC—Real Time Control)
提供精确的年月日时分秒时间信息。使系统拥有自己的日期和时间,便于进行时间相关的操作或记录。
4)脉冲宽度调制器(PWM)
用于脉冲宽度的调制,调整脉冲的宽度以满足不同应用需求。应用如电机控制,通过调整脉冲宽度来控制电机的转速或位置;变频调整等场合,通过改变脉冲宽度来改变输出频率。
例: 若设计的脉冲宽度为30纳米但无法满足需求,可通过PWM调整为50纳米等更合适的宽度。
3-7. 模拟通道组件
1)ADC
ADC(Analog-to-Digital Converter): 是模拟到数字的转换器,用于将模拟信号转换为数字信号,是嵌入式系统中的模拟输入组件。ARM芯片内部的ADC通常具有10位或12位的分辨率,分辨率越高,转换精度越高。
2)DAC
DAC(Digital-to-Analog Converter): 是数字到模拟的转换器,用于将数字信号转换为模拟信号,是嵌入式系统中的模拟输出组件。DAC的分辨率常见的有10位、12位、14位等,分辨率越高,输出模拟信号的精度越高。
3)比较器
用于对模拟电压信号与基准信号进行比较,可以监测电源电压、芯片温度等参数。通过比较采样值与基准值,判断电源是否欠压、芯片温度是否过高等,实现电压保护和温度保护等功能。例如,当芯片温度过高时,比较器可以触发报警或使系统当机,以防止芯片损坏。
3-8. 互联通信组件
ARM处理芯片内部有多个可互联通信的组件,主要包括UART、I2C、I2S、SPI、CAN、USB、Ethernet等。
1)UART
UART为标准的串行通信接口。字符格式按照低位在前、高位在后的次序进行传输,包含1位起始位,58位数据位,1位奇偶校验位,12位停止位。
2)I2C
I2C是集成电路互连的一种总线标准,用于连接嵌入式处理器及其外围器件。只有两根信号线,一根是时钟线SCL,一根是数据线SDA(双向三态)。具有特定的起始位和终止位,可完成同步半双工串行通信。常用于板级芯片之间的短距离低速通信。
I2C具有接口线少,控制方式简单,器件封装紧凑,通信速率较高等优点。
3)I2S
I2S是一种面向多媒体应用的音频串行总线。由SONY、PHILIPS等公司共同推出。主要针对数字音频设备如便携CD机、数字音频处理器等,专用于这些音频设备之间的数据传输。
4)SPI
SPI是串行外设接口,总线系统是一种同步串行外设接口。使MCU与各种外围设备以串行方式进行通信。通常用四线制,包括MISO(主输入从输出)、MOSI(主输出从输入)、SSL(芯片选择)和SCK(时钟)。
可完成全双工的同步串行通信。 用于板级芯片之间的短距离通信。
5)CAN
CAN是控制器局域网。仅有CANH和CANL两根信号线。采用差分传输的方式,可以进行远距离(1200m)多机通信。主要用于要求抗干扰能力强的工业控制领域,可组成多主多从系统。
6)USB
USB是一种通用串行总线。主要应用于与外部设备的短距离通信。采用差分方式传输数据,速度快,效率高。是目前应用最广的串行总线接口形式。
7)Ethernet
Ethernet是以太网通信接口。在许多新型ARM芯片(如Cortex-M3系列)中均集成了这一接口。
外部仅需要连接一个RJ-45连接器即可连接以太网。成为网络通信的主流接口。
8)HDMI
高清晰多媒体接口,适合影像传输,可同时传输音频和视频信号而无需A/D转换。有19针(Type A)和29针(Type B)两种模式。
4.嵌入式处理芯片的选型
4-1. 选型原则
(1)性价比原则:在选择嵌入式处理芯片时,应追求性价比,选择能够满足要求且价格合理的芯片,不必追求最贵或最好的芯片。
(2)参数选择原则:

5.嵌入式系统的存储器
5-1. 存储器层次结构
嵌入式系统的存储器分为三个层次,分别是高速缓冲存储器(Cache)、主存储器(内存)和外部存储器(外存)。对于CPU使用最频繁的少量代码和数据用SRAM作为高速缓冲存储器(Cache)存放,正在运行中的程序的大部分数据和代码存放在主存储器(内存)中;尚未启动的其余程序和代码则存放在外部存储器中。
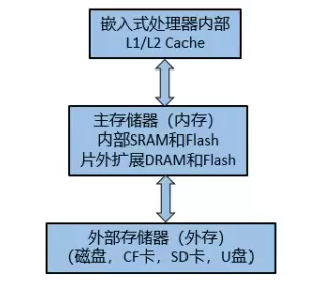
- 高速缓冲存储器(Cache): 使用SRAM构成,位于嵌入式处理器内部,访问速度最快,但容量较小,价格较高。用于存放CPU使用最频繁的少量的程序代码和数据。
- 主存储器(内存): 位于处理器外部,通过系统总线与处理器相连,容量较大,速度适中,价格适中。用于存放正在运行中的程序的大部分数据和代码。主要由SRAM和Flash构成,也可能有片外扩展的DRAM和Flash。
- 外部存储器(外存): 容量超大,速度相对较慢,价格较低。用于存放尚未启动运行的其余程序或数据。如磁盘、CF卡、SD卡、U盘等。
使用Cache的优点: 只需要增加少许成本,整个系统的性能就会得到显著提高。
5-2.存储器的分类
存储器具有多种类型,按不同的分类标准,可以划分为以下四大类:
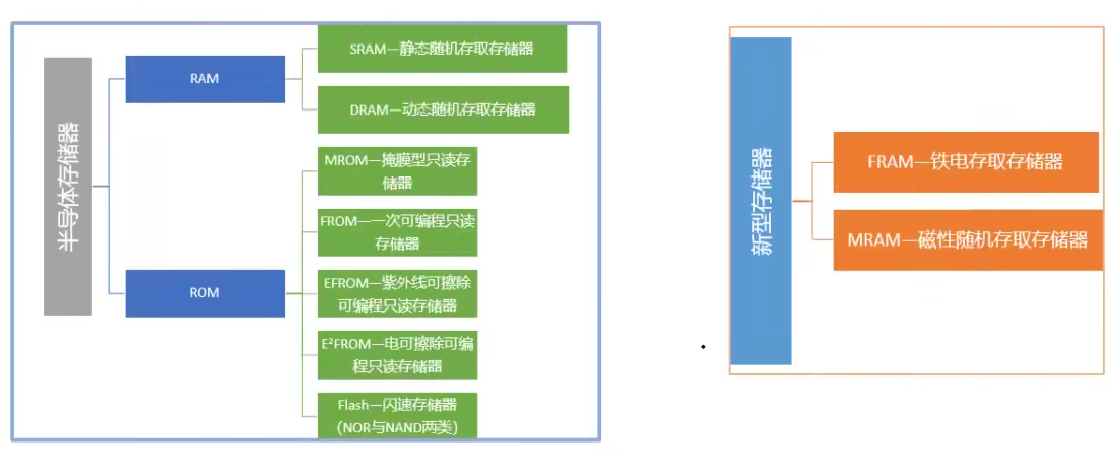
1. 按存储特性分类:随机存取存储器(RAM):允许在任意时间读写数据。只读存储器(ROM):数据只能读出,不能写入或修改。
2. 按所处位置分类:片内存储器:集成在芯片内部的存储器。片外存储器:通过外部扩展连接的存储设备。
3.嵌入式系统中分类:主存:在系统内部,通常包括片内存储器和片外扩展的存储器。辅存:指外部的存储设备。
4. 按存储内容分类:程序存储器:用于存储指令或程序。数据存储器:用于存取运算过程中所用到的数据。
主存
1) 随机存取存储器(RAM)
随机存取存储器分为静态RAM和动态DRAM,其中动态DRAM是易失性的,即掉电后数据会丢失。因此,在嵌入系统中,数据通常存储在静态RAM中,而外部扩展存储则采用动态DRAM。静态RAM价格较高但速度快,动态DRAM则价格较低且可以制作大容量存储。
为了提高动态DRAM的性能,出现了DDR(Double Data Rate)技术,包括DDR、DDR2、DDR3和DDR4等新品种。DDR技术通过双边沿触发传输数据,即上升沿和下降沿都传输数据,使数据传输速率提高了一倍。DDR2将原来的两位数据预取改为四位数据预取,进一步提高了传输速率。DDR3则改为八位数据预取,使传输速率再次提升。DDR4内存有两种型号,一种是单端信号,传输速率最大达到3.2Gbps;如果采用差分技术,则DDR4内存的传输速率可以达到6.4Gbps,是3.2Gbps的两倍。这些新品种的出现,显著提高了内存的性能。
2) 只读存储器(ROM)
提高了很大的一部分技术内容,有MROM、PROM、EPROM、EEPROM以及Flash ROM等技术。
- MROM:基于掩膜技术,目前已基本淘汰。
- PROM:可编程,但只能编程一次,无法再次编程或修改。若需重新编程,需更换处理器。
- EPROM:可擦除,采用紫外线照射进行擦除,擦除次数可达十万次,但速度较慢。
- EEPROM:作为改进,电可擦除且可编程,无需紫外线照射,性能更优。
- Flash ROM:在EEPROM基础上开发出来的新技术,特点是擦除和编程快,简称闪存。
当前主流产能技术为NOR Flash和NAND Flash,是系统设计的主要选择。
1. NOR Flash:颠覆了EPROM和EEPROM,电路尺寸小,仅为传统的一半。
- 特点:以字节为单位存取,易于程序设计,应用程序可直接在flash中执行。
- 优势:结构简单,可直接接到外围电路。
- 缺点:写入和擦除速度较慢,影响性能。
2. NAND Flash:
- 特点:以页和行为单位存取,每次存储一个页。
- 优势:使用寿命长,成本低,容量大。
- 缺点:速度较慢,常用于数据存储,如数码相机记忆卡、小型U盘等。
3) 铁电存储器(FeRAM)
铁电(FeRAM)是采用铁链晶体。这种铁链晶体具有只读存储器的非易失性特点,即掉电后数据仍能保持。同时,它还具有随机读写的特性,可以像读取RAM一样访问任意单元,速度快且功耗低。因此,铁电存储器在应用领域越来越广。与其竞争的技术是其他的非易失性存储器技术。
4) 磁性存储器(MRAM)
磁性随机存储器基于磁性存储技术,类似于机械硬盘。早期的机械硬盘容量有限,如1T或2T,且数据读取过程繁琐,效率低下,需通过磁头在柱面上移动来寻找数据。
MRAM的特点:
- 非易失性:数据在断电后仍能保留。
- 静态与动态特性:结合了静态随机存储器(SRAM)和动态随机存储器(DRAM)的特点。
- 高集成度:实现了SRAM和DRAM的集成,支持无限制的读写操作。
- 磁性存储:允许无限制地修改存储内容。
5-3.存储器主要性能指标
1)容量
存储器容量是指每一个存储芯片或模块能够存储的二进制位数。对于内存容量,单位间关系以2^10=1024倍表示。对于外存容量(如磁盘、U盘等),单位间关系以10^3=1000倍表示。
单位: 容量单位有字节(Byte,B)、千字节(KB)、兆字节(MB)、吉字节(GB)、太字节(TB)、拍字节(PB)、艾字节(EB)、泽字节(ZB)以及尧字节(YB)等。
- 存储容量公式: 内存容量=单元总数×数据(线)位数
单元个数与存储器的地址线有密切关系,因此存储芯片的容量取决于存储器芯片的地址线条数和数据线的位数。
- 单元个数L与地址线条数m的关系:m=log2L
- 存储容量V与地址线条数m、数据线位数n的关系:V=(2^m)×n
2)存取时间
存取时间是指从CPU给出有效的存储器地址开始到存储器读出数据(或写入数据)所需要的时间。通常以纳秒(ns)为单位,因为现代存储器速度较快。
时间换算: 1s=1000ms 1ms=1000us 1us=1000ns
3)宽度
存储器的带宽指每秒可传输(读出/写入)的最大数据总量。通常以B/s、KB/s、MB/s和GB/s表示。存储器带宽与存储器总线频率、数据位数(宽度)和每个总线周期的传输次数有关。
计算公式:
- 并行总线:带宽=总线频率×数据宽度/8×传输次数/总线周期(B/s)
- 串行总线:带宽=总线频率×1/10(B/s)(通常串行总线以10位为一个数据帧)
5-4.片内存储器
1)片内Cache
嵌入式微处理器内部集成的高速缓冲存储器。容量从几KB到几百KB,有的达到几MB。有的嵌入式微处理器内部有片内一级Cache,还有二级Cache。作用是减少访问外部存储器的次数,提高系统运行效率。
2)片内Flash ROM
嵌入式微控制器内部集成的程序存储器。容量从几KB到几MB不等。内置Flash使得嵌入式系统可以以最小系统形式应用,无需外接程序存储器。充分体现了嵌入式系统的专用性和嵌入性。
3)片内Flash SRAM
嵌入式微控制器内部集成的数据存储器。容量从几KB到几MB不等。临时存放系统运行过程中的数据、变量、中间结果等。SRAM是易失性存储器,系统复位后要进行初始化操作。
4)片内E2PROM
嵌入式微控制器内部集成的长期保存重要数据的存储器。从几KB到几MB不等。非易失性存储器,掉电后信息保持不变,常用于存放系统的设置和配置信息以及希望长期保存且很少改写的一些数据。
5)片内FRAM
部分嵌入式微控制器内部集成的存储器,具有RAM和ROM的全部特点。既可当作RAM用,又可当作ROM用。是当前嵌入式微控制器内部的主要存储器之一。
5-5.片外存储器
片外程序存储器主要使用NOR Flash ROM和NAND Flash ROM,片外数据存储器有SDRAM、DDR/DDR2/DDR3/DDR4等。
5-6.外部辅助存储设备
常见有闪存卡、U盘、微硬盘
6.集成电路互连总线接口I2C
I2C(Inter IC)总线用于连接嵌入式处理器及其外围器件,是一种广泛采用的串行半双工传输的总线标准。主动发起数据传输操作的I2C器件是主控器件,否则为从器件。
I2C总线具有接口线少、控制方式简单、器件封装紧凑、通信速率较高等优点,高速模式可达3.4 Mb/s。
6-1. I2C总线的操作时序
当所有器件都不使用总线时(总线空闲),SCL线和SDA线各自的上拉电阻把电平拉高,使它们均处于高电平。
数据传送时高位在前,低位在后。每次传送的字节数目没有限制,但传输操作启动后主控器件传输的第一字节是地址。为了完成一字节的传送,接收方应该发送一个确认信号ACK给发送方。ACK信号出现在SCL线的第9个时钟脉冲上,有效应答ACK在SDA上呈现低电平。数据传输结束后,通过特定的信号序列结束通信。
数据被发送出去后,I2C接口将处于等待状态(SCL线保持低电平),直到有新的数据写入I2C数据发送寄存器后,SCL线才被释放,继续发送数据。I2C接口接收到数据后,将处于等待状态,直到数据接收寄存器内容被读取后,SCL线才被释放继续传输数据。
I2C总线属于多主总线,允许总线上有一个或多个主控器件和若干从器件同时进行操作。 总线上连接的器件有时会同时竞争总线的控制权,需要进行仲裁,I2C总线主控权的仲裁有一套规约。 如果没有一个从器件对主控器件发出的地址进行确认,SDA线将保持为高电平。如果主控器件涉入异常中断,在从器件接收到最后一个数据字节后,主器件将通过取消一个ACK信号的产生来通知从器件传送操作结束。
6-2. I2C总线接口的连接
ARM芯片内部集成了I2C总线接口,可直接将基于I2C总线的主控器件或被控器件挂接到I2C总线上。每个器件的I2C总线信号SCL和SDA与其他具有I2C总线的处理器或设备同名端相连,且在SCL和SDA线上要接上拉电阻。
I2C总线在主器件和从器件之间进行数据传输之前,必须设置相应的I2C有关功能寄存器,包括I2C总线控制寄存器、I2C总线状态寄存器、I2C总线地址寄存器以及I2C总线接收/发送数据移位寄存器等。
7.串行同步外设接口SPI
SPI(Serial Peripheral Interface)是一种同步串行外设接口,允许嵌入式处理器与各种外围设备以串行方式进行通信、数据交换。外围设备包括Flash ROM、RAM、A/D转换器、网络控制器、MCU等。
一般使用4条线,包括串行时钟线SCK、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SSEL。部分SPI接口芯片带有中断信号线INT,有些则没有MOSI线。
7-1.SPI的操作过程
将数据写到SPI发送缓冲区后,在时钟信号SCK作用下,一位一位按位传输。在主机中数据从移位寄存器中自左向右发出送到从机(MOSI),同时从机中的数据自右向左发到主机(MISO),经过8个时钟周期完成1字节的发送。输入字节保留在移位寄存器中,然后从接收缓冲区中读出1字节的数据。
7-2. SPI接口的链接
1)一主一从式系统
- 系统构成: 一个主机和一个从设备。
- 数据传输方向: 主机MOSI发送,从机MOSI接收;主机MISO接收,从机MISO发送。
- 同步时钟: 主机SCK作为同步时钟输出到从机。
- 选择信号: 主机选择信号SSEL接高电平,从机SSEL接低电平,始终被选中。
2)互为主从的系统
- 数据传输方向: MISO和MOSI以及SCK都是双向的,视发送或接收而定。
- 选择信号: SSEL电平不能固定,如果作为主机,则设置SSEL为低电平,迫使对方作为从机。
3)一主多从式
- 系统构成: 一个主机多个从设备。
- 数据传输方向: 主机到从机单向传输。
- 选择信号: 通过GPIO引脚连接到从机的SSEL,确定哪一个是从设备。
4)多主多从式
- 系统构成: 多个主机和多个从设备。
- 数据传输方向: MOSI、MISO以及SCK的方向视当前主机而定。
- 选择信号: 每个设备都可能作为主机或从机被选中,SSEL线都连接到相应的GPIO端口。
8.串行异步通信接口UART
1. 发送器
负责字符的发送,可采用FIFO模式或普通模式。发送的字符先送到发送缓冲寄存器,然后通过移位寄存器,在控制单元的作用下,通过TXDn引脚一位一位顺序发送出去。
2. 接收器
负责外部送来字符的接收,可以是FIFO模式接收,也可以是普通模式接收。在FIFO模式下,缓冲器满时引发接收中断并置位接收标志;在普通模式下,接收到一个字符就引发接收中断并置标志位。
3. 波特率发生器
在外部时钟的作用下,通过编程产生所需要的波特率。最高波特率115200b/s。波特率的大小由波特率系数寄存器如UBRDIVn决定。
4. 字符格式的约定
字符以起始位开始,以停止位结束,数据位可为5位、6位、7位和8位,由编程决定。数据位之后是校验位,可为奇校验或偶校验,也可以没有校验。起始位以逻辑0为标志,停止位以逻辑1为标志,停止位可为1位、1.5位和2位。字符格式由线路控制寄存器如ULCONn决定。
5.基于UART的RS-232/485接口
嵌入式处理器至少有一个UART接口,但仅通过这个接口不能进行稍远距离的通信。采用标准的RS-232电平转换接口电路,将UART的电平转换成RS-232电平,通信距离可达15m左右。 RS-232采用负逻辑传输,逻辑0为+3V∼+15V+3V\sim+15V+3V∼+15V,逻辑1为−15V∼−3V-15V\sim-3V−15V∼−3V。
RS-485接口标准采用差分信号传输方式,具有很强的抗共模干扰能力。当A的电位比B高200mV以上时为逻辑1,当B的电位比A高200mV以上时为逻辑0。传输距离可达200m。同名端相连(A与A相连,B与B相连),无需公共地,只需连接两根线A和B。通常用于主从式多机通信系统,采用轮询方式,由主机逐一向从机寻址。
9.通用串行总线USB
USB(通用串行总线)是一种外部总线接口标准,采用差分的方式,用于规范系统与外部设备的连接和通信,是嵌入式应用领域最常用的总线接口之一。支持设备的即插即用和热插拔功能。USB总线通信采用主从方式。
- USB OTG: 可以摆脱主机,直接在具有OTG的USB总线上完成点对点通信,实现没有主机的情况下从设备之间直接进行数据传送。
9-1. USB的主要特点
- 使用方便: 可以连接多个设备,支持热插拔。
- 速度快: USB 1.0速度较慢,USB 2.0速度达到480 Mbps,USB 3.0速度达到5 Gbps(即640 MB/s)。
- 连接灵活: 可以采用串行连接,也可以通过USB HUB进行扩展。
- 独立供电: USB接口提供内置电源,USB电源能向低压设备提供5V的电源,USB 2.0提供500mA电流,USB 3.0提供900mA电流。
9-2. USB的硬软件构成
硬件:
- USB主控制器: 包括一个根集线器(Root Hub),提供一个或多个USB下行端口。
- 扩展性: 每个端口可以连接一个USB集线器(USB Hub)或一个USB设备,最多可支持127个外部设备。
软件:
- 驱动程序: 包括USB设备驱动程序、USB驱动程序以及USB主控制器驱动程序。
9-3. USB的信号编码方式
- 编码方式: USB采用翻转不归零制(NRZI)编码方式对数据进行编码。
- 逻辑传输: 电平保持时传送逻辑1,电平翻转时传送逻辑0。
9-4. USB总线的接口信号
USB总线(1.1和2.0)有4根信号线,采用半双工差分方式传送信号并提供电源。D+和D-为差分信号线,用于传输信号,是一对双绞线。另两根是电源线和地线,提供5V电源。
10.CAN总线接口
1. CAN总线接口介绍
RS-485不能构成多主系统,即同一时刻不能有两个或两个以上系统(设备)处于发送状态,这不适合实时性要求很强的工业控制领域。CAN总线接口适应多主系统,采用差分传输,控制器内置CRC校验,传输可靠性强。 由7个不同的域组成,包括帧起始、仲裁域、控制域、数据域、CRC域、应答域、帧结尾。数据域长度是0~8B,每字节包含8位。
2. 基于SPI的CAN总线扩展接口
利用具有SPI接口的典型CAN控制器MCP2510扩展CAN总线接口,可借助于S3C2440的SPI接口直接与MCP2510连接。除了CAN控制器,还需要CAN收发器,如典型CAN隔离收发器CTM8250T。
GPE1/RESET连接复位,TXCAN/TXDCANH连接SPI的SCK/OSCK,RXCAN/RXDCANL连接MISO,通过CTM8250T进行隔离收发处理。
3. 基于并行总线的CAN总线扩展接口
SJA1000,8位并行接口的CAN控制器芯片。地址线和数据线AD7AD0复用,片选信号CS连接nGCS5,访问CAN接口的地址为0x280000000x2FFFFFFF。CAN控制器的中断输入连接EXINT4,GPE3作为控制地址锁存的信号。
11.常用无线通信接口
11-1. GPS模块
全球定位系统(Global Positioning System, GPS)是利用GPS定位卫星在全球范围内实时进行定位、导航的系统,简称GPS。由于卫星运行轨道、卫星时钟误差及大气对流层、电离层对信号的影响,民用GPS的定位精度约为100米。但结合其他技术,如手机中的定位技术,精度可提升至5米甚至3米以内。GPS模块与嵌入式系统的连接方式多样,包括基于UART、SPI、USB和I2C等接口。
11-2. GPRS模块
GPRS(General Packet Radio Service)是GSM的延续,以封包方式进行数据传输,用户费用按传输数据量计算,相对经济。主要用于提供数据业务,如数据传输等。在嵌入式系统中,GPRS模块可通过通用模块接口(如UART等)连接,并使用AT指令集进行呼叫、发短信、数据传输等操作。
11-3. WiFi模块
WiFi是基于IEEE 802.11系列协议的无线局域网技术,又称Wireless Fidelity(无线保真)。WiFi模块可实现UART串口或TTL电平到WiFi通信的转换,内置IEEE802.11协议栈及TCP/IP协议栈。支持UART、TTL电平、USB接口或SPI接口数据到无线网络的转换,便于嵌入式系统实现有线数据到无线数据的传输。
11-4. 蓝牙模块
蓝牙是一种支持设备短距离通信(一般10米内)的无线低速(一般为Mb/s)通信技术。简化移动通信终端设备及设备与因特网之间的通信,使数据传输更迅速高效。采用分散式网络结构,支持快跳频和短包技术,支持点对点和点对多点通信。蓝牙模块可通过UART、SPI、I2C等通信接口连接,实现不同形式的无线通信。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)