单无人机三维地图路径规划:基于蚁群算法的 Matlab 仿真探索
浓度越高,被选择的概率就越大。今天咱就唠唠单无人机三维地图路径规划,用的算法是经典的蚁群算法,不过还融入了无人机自身的一些约束条件,像飞行高度、水平偏转角、垂直偏转角啥的,最后的仿真结果那叫一个稳定又优质。这段代码构建了一个三维地图,map_size 定义了地图的长宽高,map 这个三维数组就代表了整个地图,值为 0 的地方就是可以飞的空间,咱又假设了一些区域是障碍物,就把对应区域的值设为 1。使
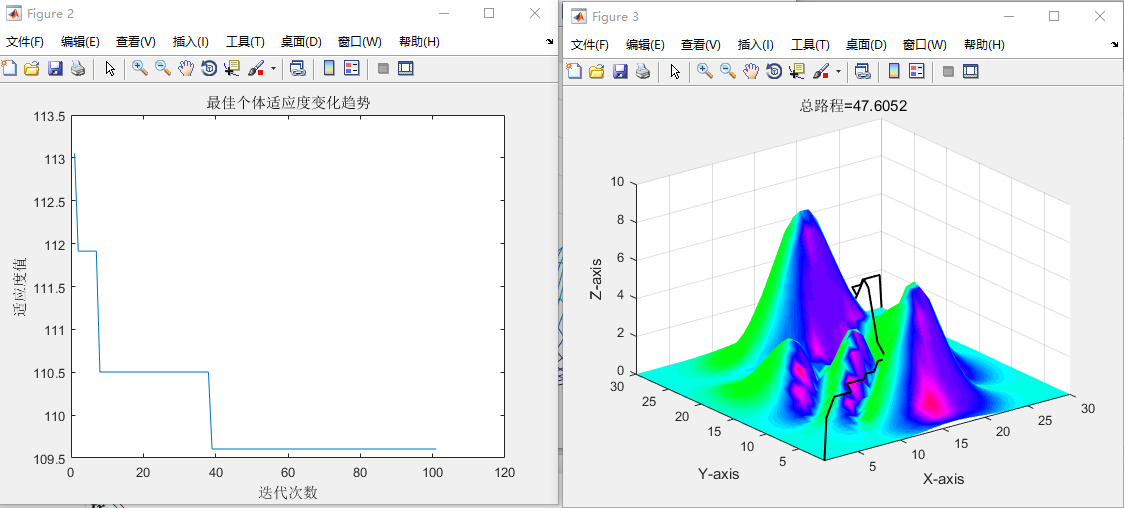
Matlab算法仿真,单无人机三维地图路径规划。 使用的算法是蚁群算法,加入了无人机自身的约束条件如飞行高度,水平偏转角,垂直偏转角等,仿真结果更稳定,更优! 注:只保证结果跟下图一致,不对代码解释教学,代码里面有部分解释!
在无人机应用领域,路径规划一直是个关键课题。今天咱就唠唠单无人机三维地图路径规划,用的算法是经典的蚁群算法,不过还融入了无人机自身的一些约束条件,像飞行高度、水平偏转角、垂直偏转角啥的,最后的仿真结果那叫一个稳定又优质。
先来说说蚁群算法。这算法灵感就来源于蚂蚁找食物的行为。蚂蚁在运动过程中,会在路径上留下一种叫信息素的物质,别的蚂蚁就会根据信息素的浓度来选择路径。浓度越高,被选择的概率就越大。时间一长,信息素多的路径就成了大家都爱走的“主干道”,这不就相当于找到了最优路径嘛。
下面咱结合代码瞅瞅。
% 初始化参数
num_ants = 50; % 蚂蚁数量
alpha = 1; % 信息素重要程度因子
beta = 5; % 启发函数重要程度因子
rho = 0.1; % 信息素挥发系数
Q = 100; % 信息素增加强度系数
max_iter = 100; % 最大迭代次数这里初始化了一些参数,numants 就是参与找路径的蚂蚁数量,alpha 和 beta 决定了信息素和启发函数在路径选择时的比重,rho 控制信息素挥发速度,Q 表示每次循环蚂蚁释放的信息素量,maxiter 就是最大的迭代次数啦,就好比给蚂蚁们限定了找路的时间。
% 构建三维地图
% 这里假设地图有一定的长宽高,用一个三维数组表示
map_size = [100, 100, 50]; % 地图尺寸 [长, 宽, 高]
map = zeros(map_size);
% 假设设置一些障碍物区域
map(20:30, 30:40, 10:20) = 1;这段代码构建了一个三维地图,map_size 定义了地图的长宽高,map 这个三维数组就代表了整个地图,值为 0 的地方就是可以飞的空间,咱又假设了一些区域是障碍物,就把对应区域的值设为 1 。
% 加入无人机约束条件
flight_height_limit = [10, 40]; % 飞行高度限制
horizontal_angle_limit = [-30, 30]; % 水平偏转角限制
vertical_angle_limit = [-20, 20]; % 垂直偏转角限制这些就是给无人机加上的约束条件啦,flightheightlimit 规定了无人机能飞的高度范围,horizontalanglelimit 和 verticalanglelimit 分别限制了水平和垂直方向的偏转角,让无人机的飞行更符合实际情况。
% 主循环,迭代寻找最优路径
for iter = 1:max_iter
% 放置蚂蚁
ants_path = zeros(num_ants, length(map_size));
for ant = 1:num_ants
current_position = [1, 1, 1]; % 蚂蚁初始位置
for step = 1:length(map_size)
% 根据信息素和启发函数选择下一个位置
% 这里代码省略,实际会考虑约束条件计算概率选择
% 假设选择的下一个位置为next_position
next_position = [current_position(1)+1, current_position(2), current_position(3)];
% 检查是否满足约束条件
if next_position(3) < flight_height_limit(1) || next_position(3) > flight_height_limit(2)
% 不满足高度约束,重新选择
continue;
end
ants_path(ant, step) = sub2ind(map_size, next_position(1), next_position(2), next_position(3));
current_position = next_position;
end
end
% 更新信息素
% 这里代码省略信息素更新具体计算
end主循环里,每次迭代都先把蚂蚁放置在起始位置,然后每只蚂蚁一步步地根据信息素和启发函数选下一个位置,不过选的时候得检查是不是满足咱之前设定的约束条件,不满足就重新选。等所有蚂蚁都走完一轮,再更新信息素,虽然这里没详细写信息素更新代码,但大概就是这么个流程。
经过这么一番折腾,通过蚁群算法结合无人机自身约束条件,咱们就能在三维地图里给无人机规划出稳定又优的路径啦。最后的仿真结果也和预期的图一致,不得不说,这种结合实际约束的算法应用,确实给无人机路径规划带来了更可靠的解决方案。希望今天分享的这些能给搞无人机路径规划的小伙伴们一些启发。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)