
【数据集】【YOLO】【目标检测】猪行为识别数据集 6854 张,YOLO猪动作识别算法实战训推教程。
【数据集】【YOLO】【目标检测】猪行为识别数据集 6854 张,YOLO猪动作识别系统实战训推教程,包含YOLO/VOC格式标注。数据集中包含5种分类:names: ['Feeding', 'Lateral_lying', 'Sitting', 'Standing', 'Sternal_lying'],代表进食、侧卧、坐、站立、卧躺。检测场景为养殖场、猪圈等场景,可以用于健康异常预警、精准饲喂管

文章前瞻:优质数据集与检测系统精选
点击链接:更多数据集与系统目录清单
一、数据集介绍
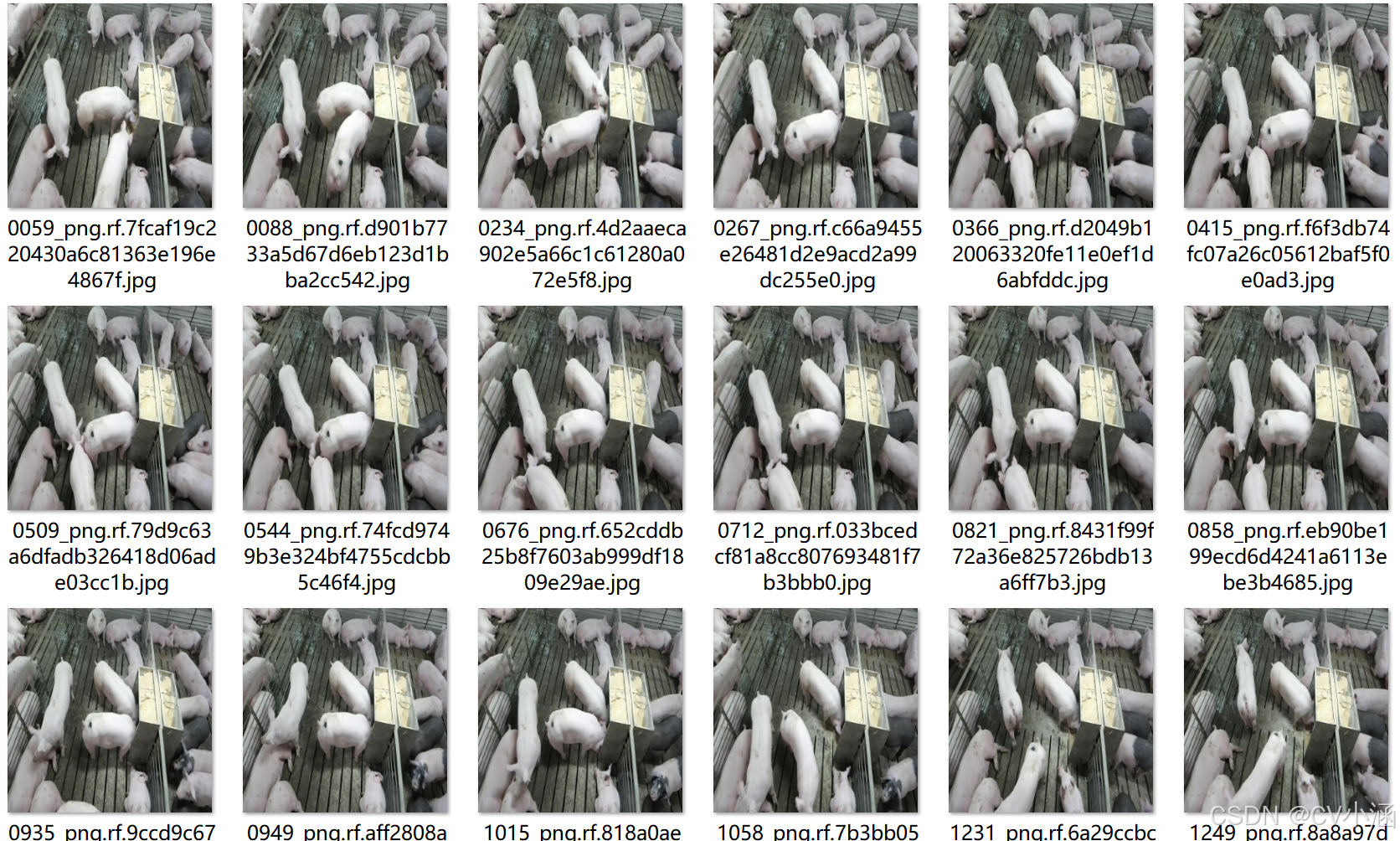
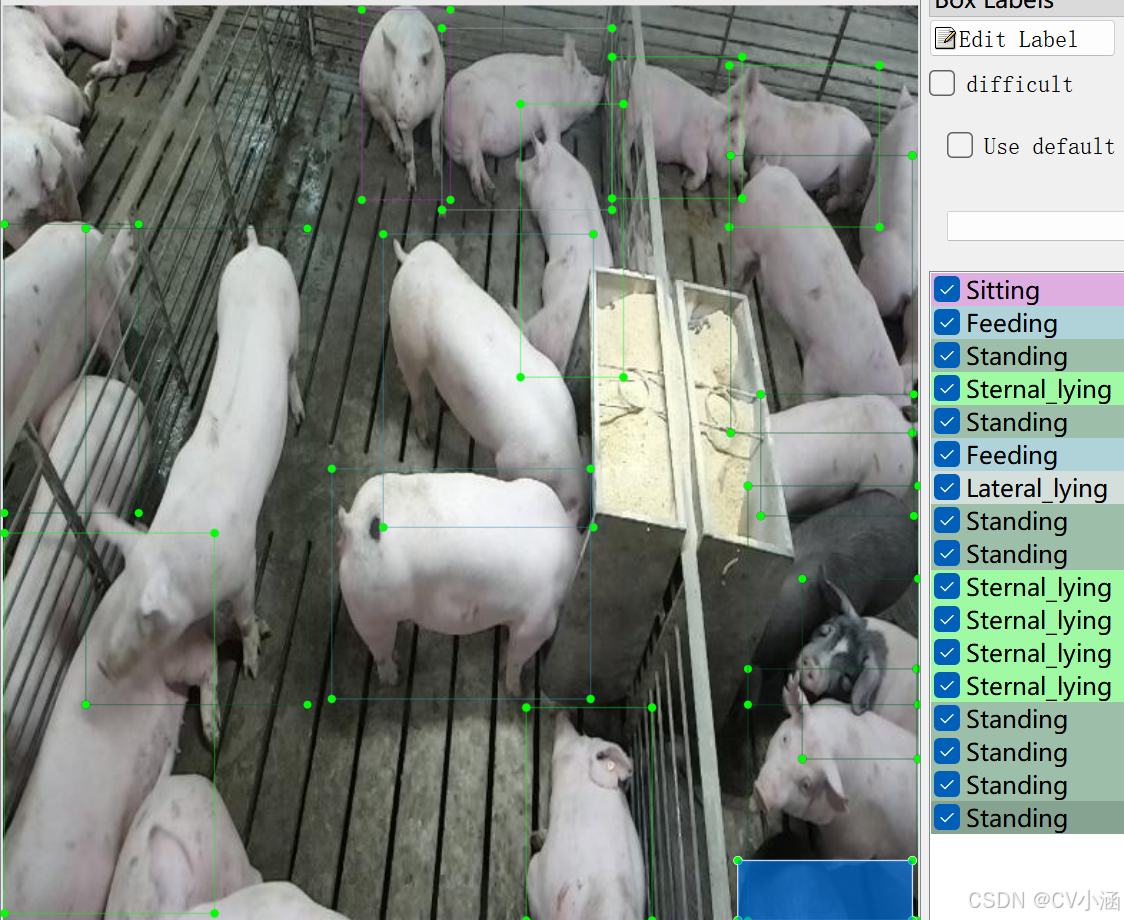
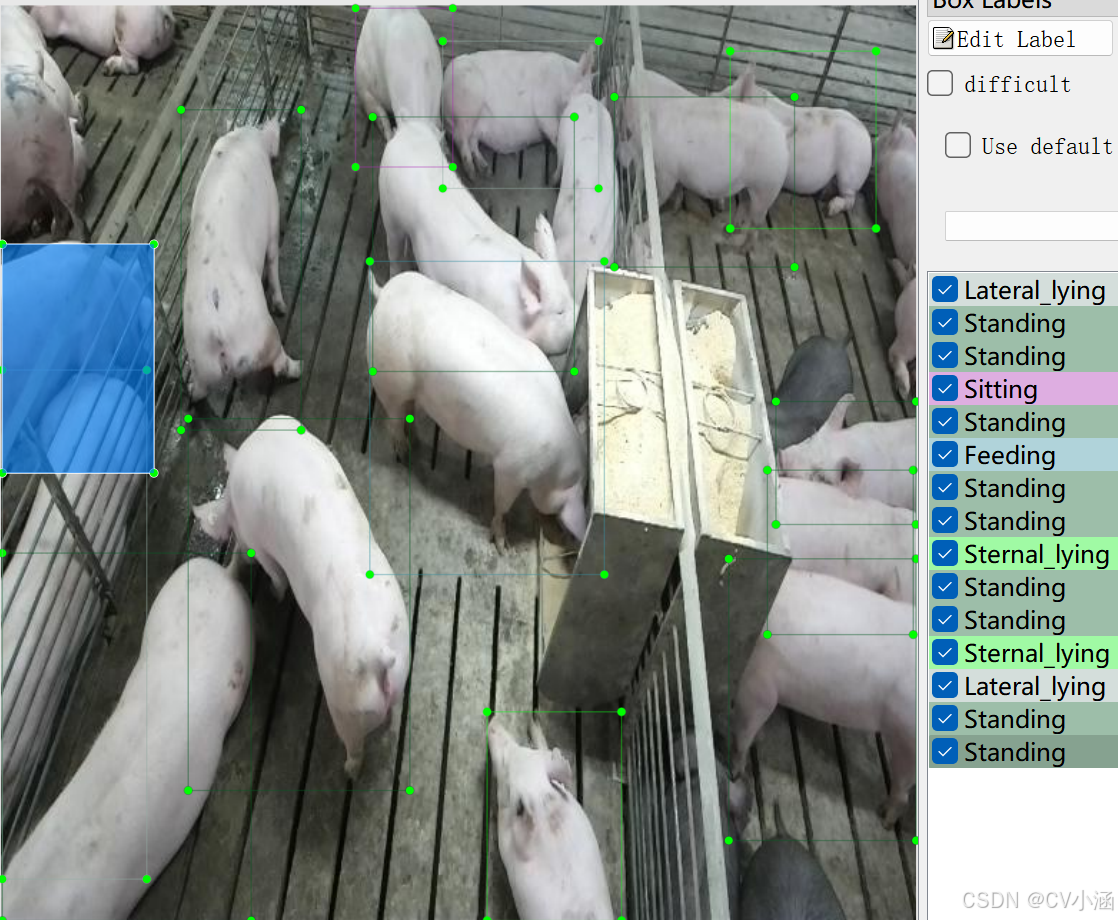
【数据集】猪行为识别数据集 6854 张,目标检测,包含YOLO/VOC格式标注。
数据集中包含5种分类:names: ['Feeding', 'Lateral_lying', 'Sitting', 'Standing', 'Sternal_lying'],代表进食、侧卧、坐、站立、卧躺。
数据集来自视频抽帧;
可用于监控猪行为动作检测等。
检测场景为养殖场、猪圈等场景,可以用于健康异常预警、精准饲喂管理、繁殖效率优化等。
文章底部或主页私信获取数据集~

1、数据概述
猪行为动作识别的重要性
养猪业是我国畜牧业核心产业,直接关系肉品供应与食品安全,但传统猪行为管理存在显著短板:人工观察依赖经验,1 名饲养员日均仅能覆盖 50-80 头猪,对采食、争斗、异常躺卧等行为的发现滞后(如疾病早期精神萎靡常延误 12 小时以上);且人工记录难以量化行为数据(如采食时长、活动频率),无法支撑精准管理。
YOLO 算法以 “实时动态识别 + 多行为分类” 破解痛点:其一,可实现 25-30 帧 / 秒实时检测,单设备覆盖 200-300 头猪群体,效率较人工提升 4 倍;其二,对采食、躺卧、争斗、发情爬跨等常见行为识别准确率超 92%,异常行为(如蜷缩不动、反复蹭墙)识别准确率超 88%,避免人工漏判;更关键的是,YOLO 能将定性行为转化为定量数据(如每日采食 12 次、每次 8 分钟),为猪群健康评估、生产优化提供数据支撑,助力养殖业从 “经验饲喂” 向 “数据驱动养殖” 转型,是保障猪群存活率、提升出栏效率的关键技术。
基于YOLO的猪行为动作识别算法
-
健康异常预警:YOLO 实时识别猪群异常行为(如精神萎靡、少食少动、呼吸困难),联动系统推送预警至饲养员,提前 6-8 小时发现疾病苗头(如猪瘟、呼吸道疾病)
-
精准饲喂管理:通过识别采食行为(次数、时长),自动统计个体采食需求,动态调整饲喂量,避免饲料浪费或营养不足,某合作社应用后,饲料利用率提升 12%,每头猪养殖成本降低 8%-10%。
-
繁殖效率优化:发情期 YOLO 精准识别母猪爬跨、烦躁不安等发情行为,自动记录发情时间并提醒配种,避免错过最佳配种期
-
应激与争斗防控:识别猪群争斗、异常骚动(如受惊吓奔跑),系统触发声光提醒或自动调节栏舍环境(如降低噪音),减少因争斗导致的外伤率
该数据集含有 6854 张图片,包含Pascal VOC XML格式和YOLO TXT格式,用于训练和测试养殖场、猪圈等有场景进行猪行为动作识别。
图片格式为jpg格式,标注格式分别为:
YOLO:txt
VOC:xml
数据集均为手工标注,保证标注精确度。
2、数据集文件结构
Pig_posture/
——test/
————Annotations/
————images/
————labels/
——train/
————Annotations/
————images/
————labels/
——valid/
————Annotations/
————images/
————labels/
——data.yaml
- 该数据集已划分训练集样本,分别是:test目录(测试集)、train目录(训练集)、valid目录(验证集);
- Annotations文件夹为Pascal VOC格式的XML文件 ;
- images文件夹为jpg格式的数据样本;
- labels文件夹是YOLO格式的TXT文件;
- data.yaml是数据集配置文件,包含猪行为识别的目标分类和加载路径。


Annotations目录下的xml文件内容如下:
<annotation>
<folder></folder>
<filename>0021_png.rf.461bdc8251ff40d90cba188dca2af0f5.jpg</filename>
<path>0021_png.rf.461bdc8251ff40d90cba188dca2af0f5.jpg</path>
<source>
<database>Pig_posture</database>
</source>
<size>
<width>640</width>
<height>640</height>
<depth>3</depth>
</size>
<segmented>0</segmented>
<object>
<name>Lateral_lying</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>306</xmin>
<xmax>421</xmax>
<ymin>23</ymin>
<ymax>141</ymax>
</bndbox>
</object>
<object>
<name>Sternal_lying</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>355</xmin>
<xmax>433</xmax>
<ymin>81</ymin>
<ymax>276</ymax>
</bndbox>
</object>
<object>
<name>Sternal_lying</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>369</xmin>
<xmax>456</xmax>
<ymin>493</ymin>
<ymax>641</ymax>
</bndbox>
</object>
<object>
<name>Feeding</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>199</xmin>
<xmax>409</xmax>
<ymin>269</ymin>
<ymax>429</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>437</xmin>
<xmax>505</xmax>
<ymin>15</ymin>
<ymax>130</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>473</xmin>
<xmax>590</xmax>
<ymin>96</ymin>
<ymax>216</ymax>
</bndbox>
</object>
<object>
<name>Sitting</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>250</xmin>
<xmax>309</xmax>
<ymin>2</ymin>
<ymax>147</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>515</xmin>
<xmax>630</xmax>
<ymin>565</ymin>
<ymax>639</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>104</xmin>
<xmax>201</xmax>
<ymin>134</ymin>
<ymax>479</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>514</xmin>
<xmax>639</xmax>
<ymin>378</ymin>
<ymax>513</ymax>
</bndbox>
</object>
<object>
<name>Feeding</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>278</xmin>
<xmax>394</xmax>
<ymin>369</ymin>
<ymax>634</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>500</xmin>
<xmax>639</xmax>
<ymin>472</ymin>
<ymax>640</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>525</xmin>
<xmax>624</xmax>
<ymin>183</ymin>
<ymax>380</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>1</xmin>
<xmax>116</xmax>
<ymin>1</ymin>
<ymax>192</ymax>
</bndbox>
</object>
<object>
<name>Sternal_lying</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>581</xmin>
<xmax>638</xmax>
<ymin>74</ymin>
<ymax>221</ymax>
</bndbox>
</object>
<object>
<name>Standing</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>499</xmin>
<xmax>613</xmax>
<ymin>14</ymin>
<ymax>130</ymax>
</bndbox>
</object>
<object>
<name>Sternal_lying</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<occluded>0</occluded>
<bndbox>
<xmin>617</xmin>
<xmax>641</xmax>
<ymin>67</ymin>
<ymax>155</ymax>
</bndbox>
</object>
<metadata>
</metadata>
</annotation>labels目录下的txt文件内容如下:
1 0.56640625 0.12578125 0.17578125 0.18828125
4 0.6140625 0.2765625 0.12265625 0.30390625
4 0.64296875 0.884375 0.1359375 0.23046875
2 0.4421875 0.11015625 0.10390625 0.2203125
3 0.2375 0.44609375 0.15234375 0.50078125
3 0.07265625 0.153125 0.1453125 0.30625
0 0.453125 0.55625 0.28046875 0.2375
3 0.90078125 0.6875 0.19140625 0.18046875
3 0.890625 0.86328125 0.2140625 0.2734375
3 0.7359375 0.11015625 0.10859375 0.18203125
0 0.52421875 0.7796875 0.1828125 0.41640625
3 0.88671875 0.9390625 0.1671875 0.1140625
3 0.8265625 0.24765625 0.18203125 0.2
4 0.95 0.22578125 0.0890625 0.23203125
3 0.88046875 0.4046875 0.09609375 0.221875
3 0.86328125 0.11015625 0.18203125 0.178125
3 0.9234375 0.5734375 0.15234375 0.205468753、数据集适用范围
- 目标检测场景,无人机识别,监控摄像头识别
- yolo训练模型或其他模型
- 养殖场、猪圈等场景
- 可以用于健康异常预警、精准饲喂管理、繁殖效率优化等
4、数据集标注结果


4.1、数据集内容
- 多角度场景:行人视角,监控视角;
- 标注内容:names: ['Feeding', 'Lateral_lying', 'Sitting', 'Standing', 'Sternal_lying'],总计5个分类;
- 图片总量:6854张图片数据;
- 标注类型:含有Pascal VOC XML格式和yolo TXT格式;
5、训练过程
5.1、导入训练数据
下载YOLOv8项目压缩包,解压在任意本地workspace文件夹中。
下载YOLOv8预训练模型,导入到ultralytics-main项目根目录下。

在ultralytics-main项目根目录下,创建data文件夹,并在data文件夹下创建子文件夹:Annotations、images、imageSets、labels,其中,将pascal VOC格式的XML文件手动导入到Annotations文件夹中,将JPG格式的图像数据导入到images文件夹中,imageSets和labels两个文件夹不导入数据。
data目录结构如下:
data/
——Annotations/ //存放xml文件
——images/ //存放jpg图像
——imageSets/
——labels/
整体项目结构如下所示:

5.2、数据分割
首先在ultralytics-main目录下创建一个split_train_val.py文件,运行文件之后会在imageSets文件夹下将数据集划分为训练集train.txt、验证集val.txt、测试集test.txt,里面存放的就是用于训练、验证、测试的图片名称。
import os
import random
trainval_percent = 0.9
train_percent = 0.9
xmlfilepath = 'data/Annotations'
txtsavepath = 'data/ImageSets'
total_xml = os.listdir(xmlfilepath)
num = len(total_xml)
list = range(num)
tv = int(num * trainval_percent)
tr = int(tv * train_percent)
trainval = random.sample(list, tv)
train = random.sample(trainval, tr)
ftrainval = open('data/ImageSets/trainval.txt', 'w')
ftest = open('data/ImageSets/test.txt', 'w')
ftrain = open('data/ImageSets/train.txt', 'w')
fval = open('data/ImageSets/val.txt', 'w')
for i in list:
name = total_xml[i][:-4] + '\n'
if i in trainval:
ftrainval.write(name)
if i in train:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()5.3、数据集格式化处理
在ultralytics-main目录下创建一个voc_label.py文件,用于处理图像标注数据,将其从XML格式(通常用于Pascal VOC数据集)转换为YOLO格式。
convert_annotation函数
-
这个函数读取一个图像的XML标注文件,将其转换为YOLO格式的文本文件。
-
它打开XML文件,解析树结构,提取图像的宽度和高度。
-
然后,它遍历每个目标对象(
object),检查其类别是否在classes列表中,并忽略标注为困难(difficult)的对象。 -
对于每个有效的对象,它提取边界框坐标,进行必要的越界修正,然后调用
convert函数将坐标转换为YOLO格式。 -
最后,它将类别ID和归一化后的边界框坐标写入一个新的文本文件
import xml.etree.ElementTree as ET
import os
from os import getcwd
sets = ['train', 'val', 'test']
classes = ['Feeding', 'Lateral_lying', 'Sitting', 'Standing', 'Sternal_lying'] # 根据标签名称填写类别
abs_path = os.getcwd()
print(abs_path)
def convert(size, box):
dw = 1. / (size[0])
dh = 1. / (size[1])
x = (box[0] + box[1]) / 2.0 - 1
y = (box[2] + box[3]) / 2.0 - 1
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return x, y, w, h
def convert_annotation(image_id):
in_file = open('data/Annotations/%s.xml' % (image_id), encoding='UTF-8')
out_file = open('data/labels/%s.txt' % (image_id), 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text),
float(xmlbox.find('xmax').text),
float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
b1, b2, b3, b4 = b
# 标注越界修正
if b2 > w:
b2 = w
if b4 > h:
b4 = h
b = (b1, b2, b3, b4)
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
wd = getcwd()
for image_set in sets:
if not os.path.exists('data/labels/'):
os.makedirs('data/labels/')
image_ids = open('data/ImageSets/%s.txt' % (image_set)).read().strip().split()
list_file = open('data/%s.txt' % (image_set), 'w')
for image_id in image_ids:
list_file.write(abs_path + '/data/images/%s.jpg\n' % (image_id))
convert_annotation(image_id)
list_file.close()5.4、修改数据集配置文件
在ultralytics-main目录下创建一个data.yaml文件:
train: data/train.txt
val: data/val.txt
test: data/test.txt
nc: 5
names: ['Feeding', 'Lateral_lying', 'Sitting', 'Standing', 'Sternal_lying']5.5、执行命令
执行train.py
model = YOLO('yolov8s.pt')
results = model.train(data='data.yaml', epochs=200, imgsz=640, batch=16, workers=0)也可以在终端执行下述命令:
yolo train data=data.yaml model=yolov8s.pt epochs=200 imgsz=640 batch=16 workers=0 device=05.6、模型预测
你可以选择新建predict.py预测脚本文件,输入视频流或者图像进行预测。
代码如下:
import cv2
from ultralytics import YOLO
# Load the YOLOv8 model
model = YOLO("./best.pt") # 自定义预测模型加载路径
# Open the video file
video_path = "./demo.mp4" # 自定义预测视频路径
cap = cv2.VideoCapture(video_path)
# Get the video properties
frame_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = cap.get(cv2.CAP_PROP_FPS)
# Define the codec and create VideoWriter object
fourcc = cv2.VideoWriter_fourcc(*'mp4v') # Be sure to use lower case
out = cv2.VideoWriter('./outputs.mp4', fourcc, fps, (frame_width, frame_height)) # 自定义输出视频路径
# Loop through the video frames
while cap.isOpened():
# Read a frame from the video
success, frame = cap.read()
if success:
# Run YOLOv8 inference on the frame
# results = model(frame)
results = model.predict(source=frame, save=True, imgsz=640, conf=0.5)
results[0].names[0] = "道路积水"
# Visualize the results on the frame
annotated_frame = results[0].plot()
# Write the annotated frame to the output file
out.write(annotated_frame)
# Display the annotated frame (optional)
cv2.imshow("YOLOv8 Inference", annotated_frame)
# Break the loop if 'q' is pressed
if cv2.waitKey(1) & 0xFF == ord("q"):
break
else:
# Break the loop if the end of the video is reached
break
# Release the video capture and writer objects
cap.release()
out.release()
cv2.destroyAllWindows()也可以直接在命令行窗口或者Annoconda终端输入以下命令进行模型预测:
yolo predict model="best.pt" source='demo.jpg'6、获取数据集
文章底部或主页私信获取数据集~
二、基于QT的目标检测可视化界面
1、环境配置
# 安装torch环境
pip install torch -i https://pypi.tuna.tsinghua.edu.cn/simple
# 安装PySide6依赖项
pip install PySide6 -i https://pypi.tuna.tsinghua.edu.cn/simple
# 安装opencv-python依赖项
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple2、使用说明

界面功能介绍:
- 原视频/图片区:上半部分左边区域为原视频/图片展示区;
- 检测区:上半部分右边区域为检测结果输出展示区;
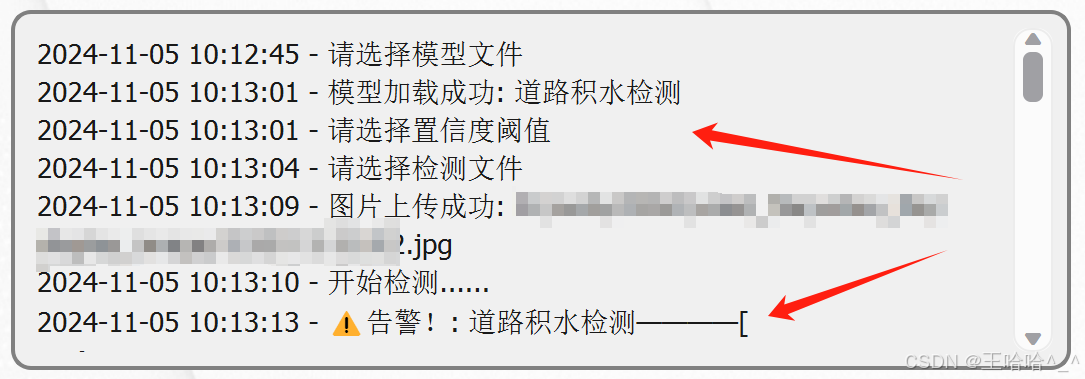
- 文本框:打印输出操作日志,其中告警以json格式输出,包含标签框的坐标,标签名称等;
- 加载模型:下拉框绑定本地文件路径,按钮加载路径下的模型文件;
- 置信度阈值:自定义检测区的置信度阈值,可以通过滑动条的方式设置;
- 文件上传:选择目标文件,包含JPG格式和MP4格式;
- 开始检测:执行检测程序;
- 停止:终止检测程序;
3、预测效果展示
3.1、图片检测

切换置信度再次执行:

上图左下区域可以看到json格式的告警信息,用于反馈实际作业中的管理系统,为管理员提供道路养护决策 。
3.2、视频检测

3.3、日志文本框
4、前端代码
class MyWindow(QtWidgets.QMainWindow):
def __init__(self):
super().__init__()
self.init_gui()
self.model = None
self.timer = QtCore.QTimer()
self.timer1 = QtCore.QTimer()
self.cap = None
self.video = None
self.file_path = None
self.base_name = None
self.timer1.timeout.connect(self.video_show)
def init_gui(self):
self.folder_path = "model_file" # 自定义修改:设置文件夹路径
self.setFixedSize(1300, 650)
self.setWindowTitle('目标检测') # 自定义修改:设置窗口名称
self.setWindowIcon(QIcon("111.jpg")) # 自定义修改:设置窗口图标
central_widget = QtWidgets.QWidget(self)
self.setCentralWidget(central_widget)
main_layout = QtWidgets.QVBoxLayout(central_widget)
# 界面上半部分: 视频框
topLayout = QtWidgets.QHBoxLayout()
self.oriVideoLabel = QtWidgets.QLabel(self)
# 界面下半部分: 输出框 和 按钮
groupBox = QtWidgets.QGroupBox(self)
groupBox.setStyleSheet('QGroupBox {border: 0px solid #D7E2F9;}')
bottomLayout = QtWidgets.QHBoxLayout(groupBox)
main_layout.addWidget(groupBox)
btnLayout = QtWidgets.QHBoxLayout()
btn1Layout = QtWidgets.QVBoxLayout()
btn2Layout = QtWidgets.QVBoxLayout()
btn3Layout = QtWidgets.QVBoxLayout()
# 创建日志打印文本框
self.outputField = QtWidgets.QTextBrowser()
self.outputField.setFixedSize(530, 180)
self.outputField.setStyleSheet('font-size: 13px; font-family: "Microsoft YaHei"; background-color: #f0f0f0; border: 2px solid #ccc; border-radius: 10px;')
self.detectlabel = QtWidgets.QLabel(self)
self.oriVideoLabel.setFixedSize(530, 400)
self.detectlabel.setFixedSize(530, 400)
self.oriVideoLabel.setStyleSheet('border: 2px solid #ccc; border-radius: 10px; margin-top:75px;')
self.detectlabel.setStyleSheet('border: 2px solid #ccc; border-radius: 10px; margin-top: 75px;')
topLayout.addWidget(self.oriVideoLabel)
topLayout.addWidget(self.detectlabel)
main_layout.addLayout(topLayout)5、代码获取
更多其他数据集