最近在折腾机械臂仿真和视觉抓取,踩了不少坑也攒了点经验。今天咱们就聊点硬核实操,手把手带你玩转ROS机械臂仿真和视觉抓取那些事儿
遇到过最坑的是ROS话题命名冲突——确保你的相机节点和darknet_ros输出话题命名空间一致,不然就像我上次对着空气抓了半小时...这招在项目汇报时特别唬人,导师看了直呼内行——前提是你记得提前把仿真速度调成1x,别让机械臂舞出残影...(别问我为什么强调这个)血泪教训:在Gazebo里能跑的动作,真实机械臂可能直接极限位报警,别问我是怎么知道的...仿真中经常遇到奇异点问题,建议把关节限制设
ros机械臂仿真代做,视觉抓取,darknet_ros配置 Matlab机械臂运动学,轨迹规划
先来点带劲的——用MoveIt!搞机械臂运动规划。上代码:
<launch>
<include file="$(find ur5_moveit_config)/launch/ur5_moveit_planning_execution.launch">
<arg name="limited" value="true"/>
</include>
<include file="$(find ur5_moveit_config)/launch/moveit_rviz.launch">
<arg name="config" value="true"/>
</include>
</launch>这个launch文件启动了UR5机械臂的MoveIt配置,重点注意limited参数控制关节运动范围。仿真中经常遇到奇异点问题,建议把关节限制设为实际物理结构的80%,能有效避免规划失败。
视觉抓取最刺激的部分当属darknetros配置。在yoloros_config.yaml里:
yolo_model:
config_file:
name: yolov4-tiny
detection_classes:
- 'cup'
- 'box'
topic_name: /camera/detected_objects这里我强烈建议把检测类别精简到实际需要的物体,YOLOv4-tiny在CPU上也能跑到15fps。遇到过最坑的是ROS话题命名冲突——确保你的相机节点和darknet_ros输出话题命名空间一致,不然就像我上次对着空气抓了半小时...
Matlab搞运动学可比手推雅可比矩阵舒服多了。上硬菜:
% PUMA560逆运动学
robot = loadrobot('puma560');
ik = inverseKinematics('RigidBodyTree',robot);
[qSol,qInfo] = ik('tool',trvec2tform([0.5 0.3 0.2]),ones(1,6),robot.homeConfiguration);这个逆解算例子里,trvec2tform生成的齐次矩阵特别容易踩坑。新手注意坐标系方向!曾经有个兄弟Z轴方向设反,机械臂直接表演倒立抓取...
轨迹规划来个五次多项式示例:
t = linspace(0,5,100);
[q,qd,qdd] = quinticpolytraj([0 1], [0 5], t);
plot(t,q,'LineWidth',2)别看这代码简单,关键在时间参数设定。实际工程中要把关节力矩约束考虑进去,我一般会加个安全系数0.6,防止过冲撞机。上次没加系数结果...实验室的咖啡杯又得重买了。
仿真和实机联调时,建议用ROS的jointstatepublisher_gui先手动拖拽验证运动范围。血泪教训:在Gazebo里能跑的动作,真实机械臂可能直接极限位报警,别问我是怎么知道的...
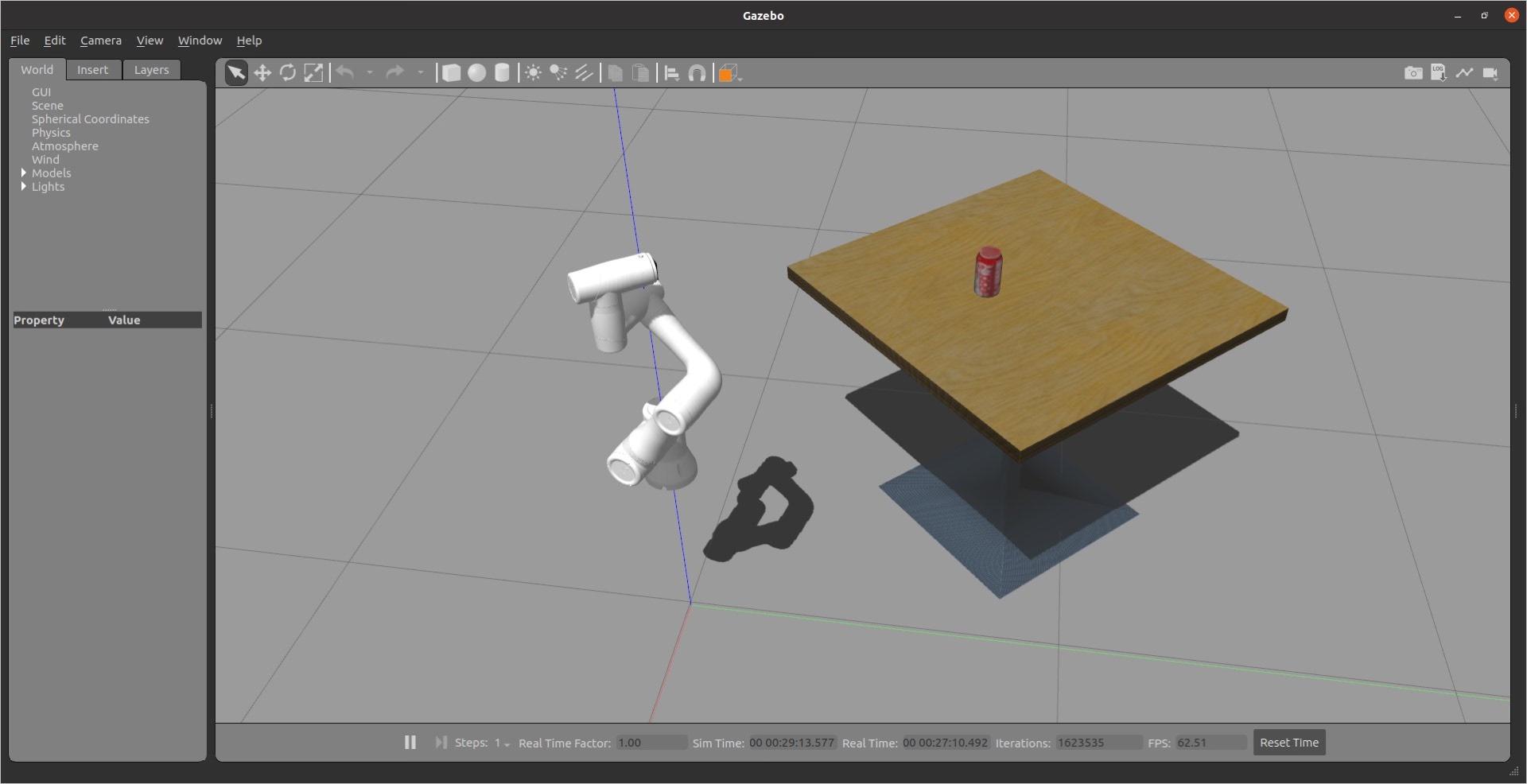
最后说个骚操作:把Matlab的轨迹规划结果通过ROS Toolbox发到Gazebo,实现全链路验证。这招在项目汇报时特别唬人,导师看了直呼内行——前提是你记得提前把仿真速度调成1x,别让机械臂舞出残影...(别问我为什么强调这个)

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 2
2 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)