AGV 与扫地机器人:全覆盖移动避障路径规划探秘
AGV全覆盖移动避障路径规划扫地机器人路径规划第一类算法 全覆盖智能算法%% 基于深度优先搜索算法的路径规划—扫地机器人移动仿真% 返回深度优先搜索实现全覆盖的运行次数% 将栅格模型的每一个栅格看成一个点% 实际中栅格模型是连续的,在计算机处理时看作离散的% 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态第二对比算法%% 随机碰撞的路径规划—扫地机器人移动仿真% 返回深度优先搜
AGV全覆盖移动避障路径规划 扫地机器人路径规划 第一类算法 全覆盖智能算法 %% 基于深度优先搜索算法的路径规划—扫地机器人移动仿真 % 返回深度优先搜索实现全覆盖的运行次数 % 将栅格模型的每一个栅格看成一个点 % 实际中栅格模型是连续的,在计算机处理时看作离散的 % 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态 第二对比算法 %% 随机碰撞的路径规划—扫地机器人移动仿真 % 返回深度优先搜索实现全覆盖的运行次数 % 将栅格模型的每一个栅格看成一个点 % 实际中栅格模型是连续的,在计算机处理时看作离散的 % 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态
在自动化设备领域,AGV(自动导引车)和扫地机器人的路径规划一直是关键技术点。今天咱们就聊聊其中的全覆盖移动避障路径规划,这对于它们高效完成任务至关重要。
扫地机器人路径规划算法之深度优先搜索算法
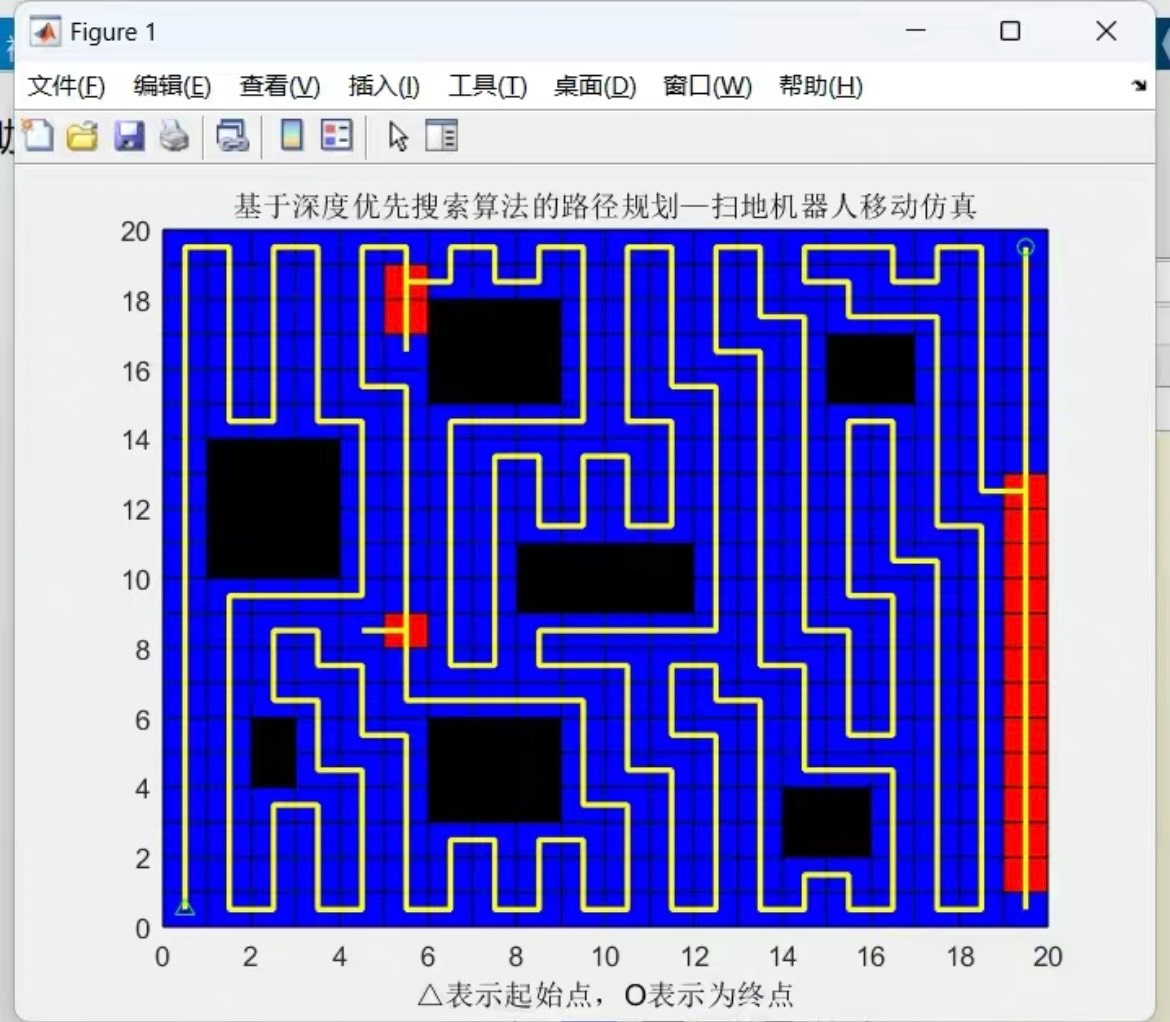
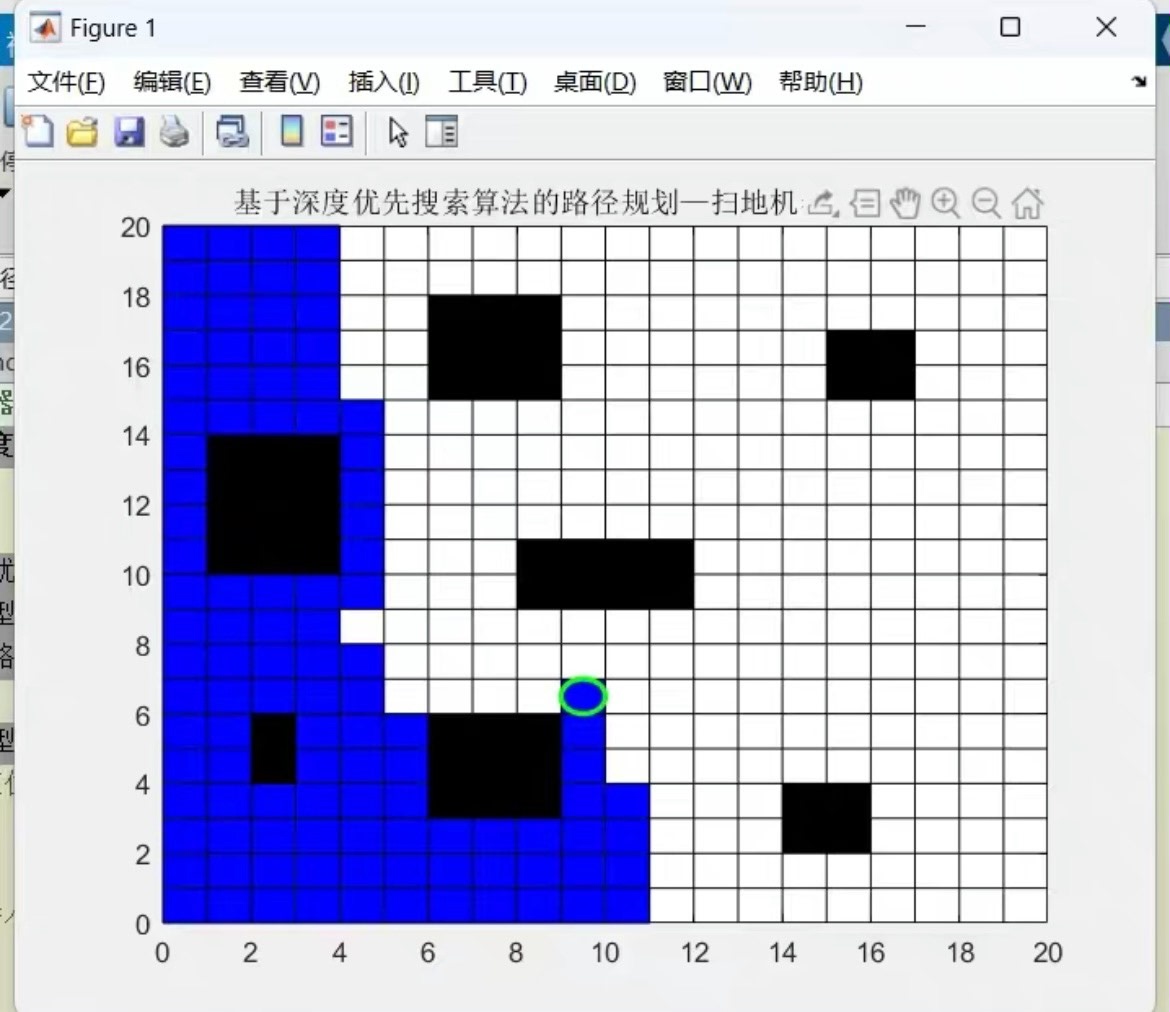
基于深度优先搜索算法的路径规划—扫地机器人移动仿真
深度优先搜索(DFS)在扫地机器人全覆盖路径规划中有着独特的应用。咱们先从概念说起,在这个场景里,把栅格模型的每一个栅格都看成一个点。虽然实际中的栅格模型是连续的,但在计算机处理时,我们得把它看作离散的,然后抽象为标识矩阵。这个矩阵对应位置的标记就代表了栅格对应位置的状态。
下面来段简单的Python代码示例,感受下大概思路:
grid = [[0] * 5 for _ in range(5)] # 创建一个5x5的栅格矩阵,0表示未访问
visited = set()
def dfs(x, y):
if x < 0 or x >= len(grid) or y < 0 or y >= len(grid[0]) or (x, y) in visited:
return
visited.add((x, y))
grid[x][y] = 1 # 标记为已访问
dfs(x - 1, y)
dfs(x + 1, y)
dfs(x, y - 1)
dfs(x, y + 1)
dfs(0, 0) # 从(0,0)位置开始深度优先搜索在这段代码里,grid 就是咱们的栅格模型矩阵,visited 集合用来记录已经访问过的栅格点。dfs 函数负责深度优先搜索的具体逻辑,如果当前点超出边界或者已经访问过,就直接返回。否则,标记当前点为已访问,然后向上下左右四个方向继续深度优先搜索。这个算法通过不断深入探索一条路径,直到无法继续,然后回溯,从而实现对整个区域的覆盖探索。它返回深度优先搜索实现全覆盖的运行次数,不过在上述简单代码里没体现具体计数逻辑,实际应用中可以添加计数器变量来实现。
随机碰撞的路径规划算法
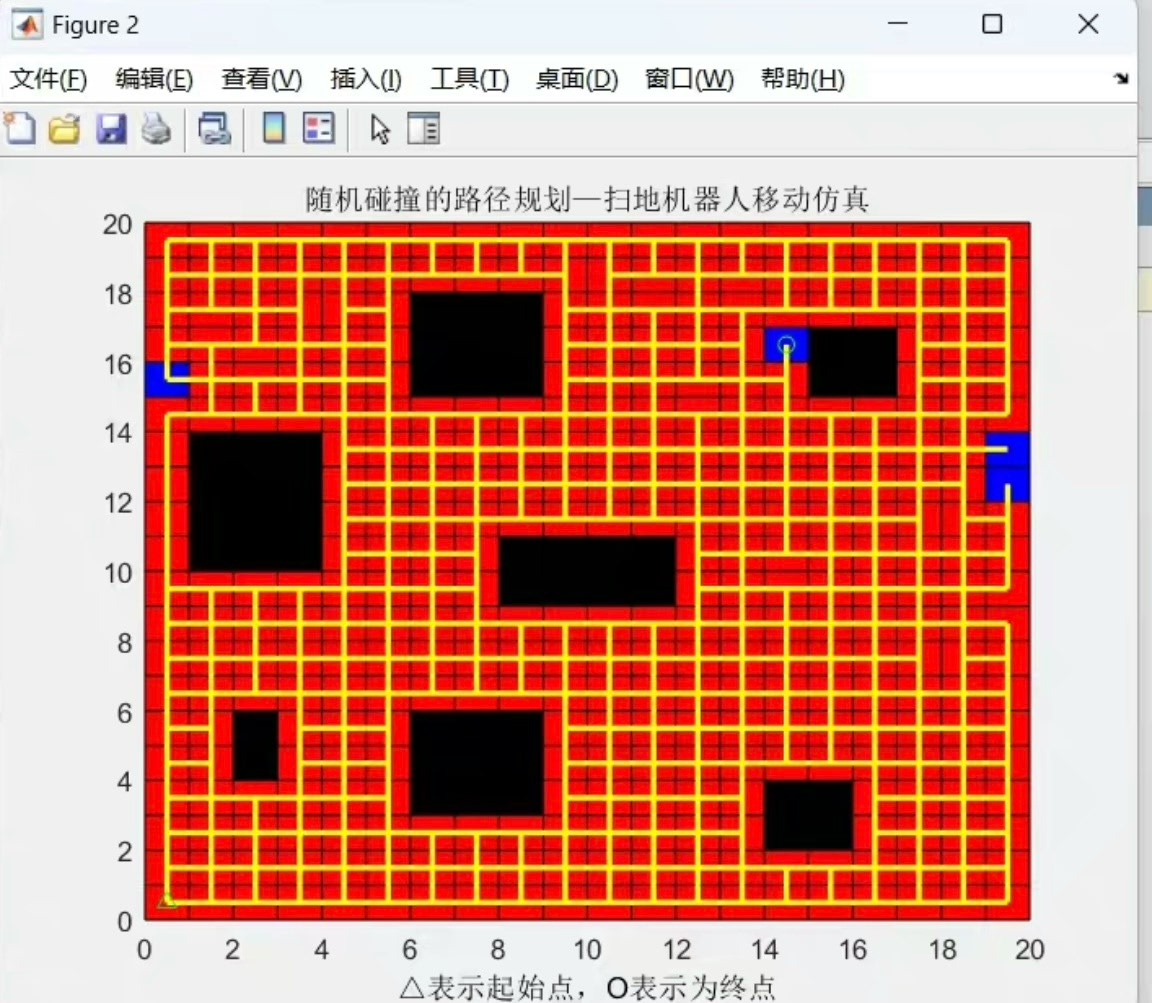
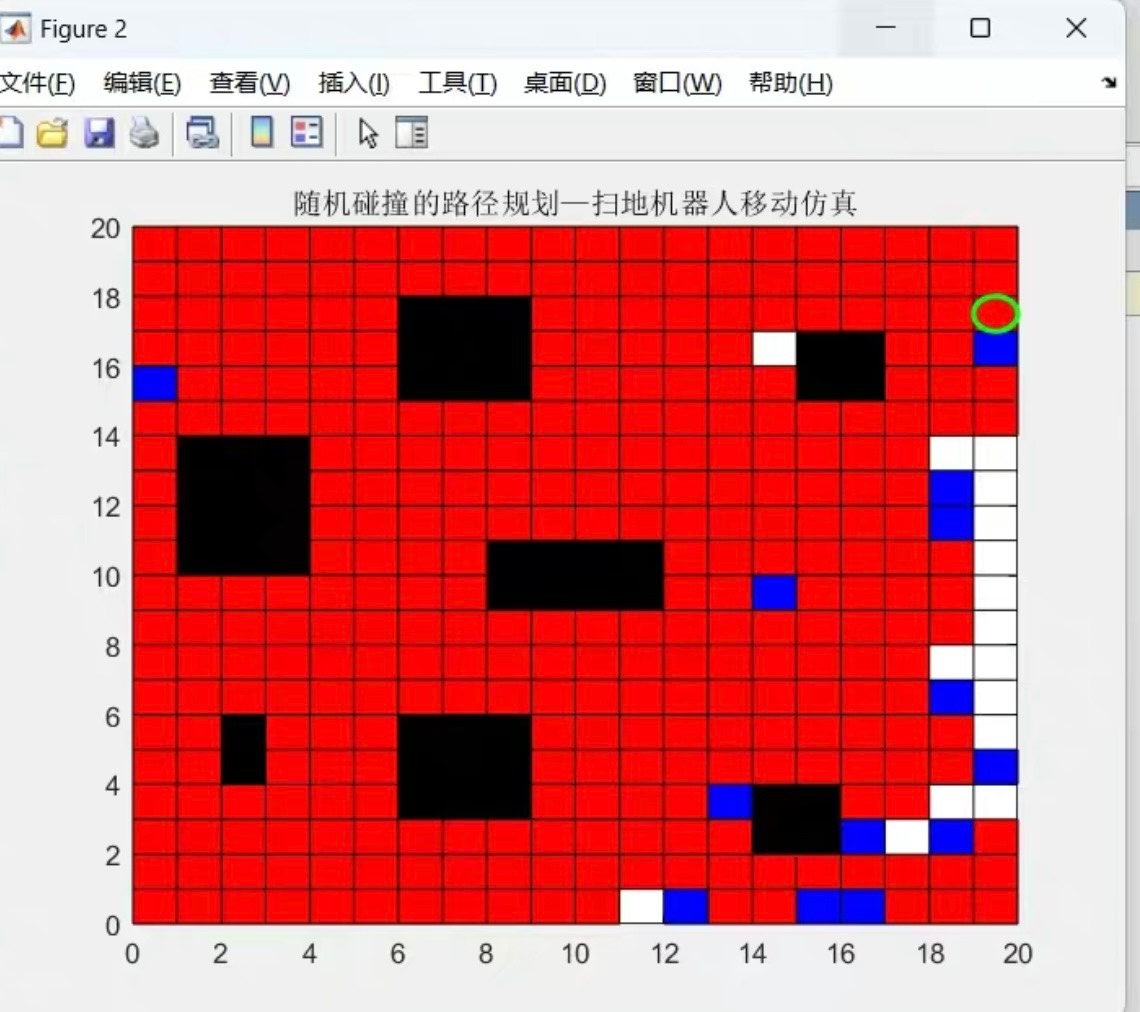
随机碰撞的路径规划—扫地机器人移动仿真
这也是一种有意思的路径规划算法。同样将栅格模型的每一个栅格看成一个点,和深度优先搜索一样,实际连续的栅格模型在计算机处理时离散化,并抽象为标识矩阵。
简单的代码示例(还是Python):
import random
grid = [[0] * 5 for _ in range(5)]
visited = set()
while len(visited) < len(grid) * len(grid[0]):
x = random.randint(0, len(grid) - 1)
y = random.randint(0, len(grid[0]) - 1)
if (x, y) not in visited:
visited.add((x, y))
grid[x][y] = 1在这个代码中,通过不断随机生成栅格点的坐标,如果该点未被访问过,就标记为已访问。这种随机碰撞式的路径规划,不需要像深度优先搜索那样遵循特定的搜索顺序,而是比较“随性”地去探索区域。虽然它可能在覆盖效率上不如一些更优化的算法,但在某些简单场景或者对效率要求不是极高的情况下,也能完成扫地机器人的全覆盖任务。而且实现起来相对简单直接,代码量也比较少。
对比这两种算法,深度优先搜索相对更有“章法”,按照一定的顺序探索区域,能够保证系统性的全覆盖;而随机碰撞则胜在简单粗暴,实现成本低,但可能在路径规划上没有那么高效和合理。不同的场景可以根据实际需求选择合适的算法来实现AGV或者扫地机器人的全覆盖移动避障路径规划。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 41
41 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)