如何在深度学习中运用数值代数的迭代法做训练?
你好,我是程序员贵哥。欢迎你继续跟我学习线性代数,今天我要讲的内容是“数值线性代数的迭代法,以及如何在实践中运用迭代法求解线性方程组”。大密度线性方程组的计算已经成为了世界上最快计算机的测试标准。2008年,IBM为美国能源部Los Alamos国家实验室建造了“Roadrunner”计算机系统,它的运算速度达到了1.026 petaflop/s(千万亿次/秒,petaflop是衡量计算机性能的一
你好,我是程序员贵哥。欢迎你继续跟我学习线性代数,今天我要讲的内容是“数值线性代数的迭代法,以及如何在实践中运用迭代法求解线性方程组”。
大密度线性方程组的计算已经成为了世界上最快计算机的测试标准。2008年,IBM为美国能源部Los Alamos国家实验室建造了“Roadrunner”计算机系统,它的运算速度达到了1.026 petaflop/s(千万亿次/秒,petaflop是衡量计算机性能的一个重要单位,1 petaflop等于每秒钟进行1千万亿次的数学运算)。按摩尔定律计算,现在世界上最快的计算机已经达到了200 petaflop,我国也早就进入了世界前列,并有望实现1 exaflop/s(百亿亿次/秒),成为世界第一。

可能你会有些疑惑,为什么我要在课程后期来讲数值线性代数呢?
那是因为数值线性代数是一门特殊的学科,是特别为计算机上进行线性代数计算服务的,可以说它是研究矩阵运算算法的学科,偏向算法实践与工程设计。有了之前基础知识的铺垫后,学习数值线性代数会更有效,而且它是可以直接运用在计算机科学中的,比如:在图像压缩中,使用奇异值分解(SVD)来节省内存;在深度学习中,使用共轭梯度来加速神经网络的收敛。
迭代方法说明
课程内容的前期一直都在用直接法来解线性方程组,比如高斯消元法。但在实践中,我们在面对复杂场景时,更多的会使用迭代法来求解(也就是所谓的间接法),因为很多场景会用到大型稀疏矩阵。所以,我打算在这里讲讲机器学习中的迭代法应用。这里需要注意,不是说直接法不重要,直接法解决了许多相对简单的问题,也是其他方法的基础。
现在我就来说一说什么是迭代法?
我们还是通过线性方程组Ax=bAx=bAx=b来看看。在这里我们分解AAA,使得A=S−TA=S-TA=S−T,代入等式后得出:Sx=Tx+bSx=Tx+bSx=Tx+b(等式①)。
按这样的方式持续下去,通过迭代的方式来解SxSxSx。这就类似于把复杂问题层层分解和简化,最终使得这个迭代等式成立:Sx_k+1=Tx_k+bSx\_{k+1}=Tx\_{k}+bSx_k+1=Tx_k+b(等式②)。
更具体一点来说,我们其实是从x_0x\_{0}x_0开始,解Sx_1=Tx_0+bSx\_{1}=Tx\_{0}+bSx_1=Tx_0+b。然后,继续解Sx_2=Tx_1+bSx\_{2}=Tx\_{1}+bSx_2=Tx_1+b。一直到x_k+1x\_{k+1}x_k+1非常接近x_kx\_{k}x_k时,又或者说残余值r_k=b−Ax_kr\_{k}=b-Ax\_{k}r_k=b−Ax_k接近000时,迭代停止。由于线性方程组的复杂程度不同,这个过程经历几百次的迭代都是有可能的。所以,迭代法的目标就是比消元法更快速地逼近真实解。
那么究竟应该如何快速地逼近真实解呢?
这里,A=S−TA=S-TA=S−T,AAA的分解成了关键,也就是说AAA的分解目标是每步的运算速度和收敛速度都要快。每步的运算速度取决于SSS,而收敛速度取决于“错误”(error),e_ke\_{k}e_k,这里的错误 e_ke\_{k}e_k是x−x_kx-x\_{k}x−x_k,也就是说xxx和x_kx\_{k}x_k的差应该快速逼近0,我们把错误表示成这样:e_k+1=S−1Te_ke\_{k+1}=S^{-1}Te\_{k}e_k+1=S−1Te_k(等式③)。
它是等式②和①差后得出的结果,迭代的每一步里,错误都会被S−1TS^{-1}TS−1T乘,如果S−1TS^{-1}TS−1T越小,那逼近0的速度就更快。在极端分解情况下,S=AS=AS=A,T=0T=0T=0,那Ax=bAx=bAx=b又回来了,第一次迭代就能完成收敛,其中S−1TS^{-1}TS−1T等于0。
但是,这一次迭代的成本太高,我们回到了非迭代方式的原点。所以,你也知道,鱼和熊掌不能兼得,SSS的选择成为了关键。那我们要如何在每一次迭代的速度和快速收敛之间做出平衡呢?我给你SSS选择的几种常见方法:
- 雅可比方法(Jacobi method):SSS取AAA的对角部分。
- 高斯-赛德尔方法(Gauss-Seidel):SSS取AAA的下三角部分,包含对角。
- ILU方法(Incomplete LU):S=LS=LS=L估计乘UUU估计。
雅可比方法实践
总体介绍了迭代法理论之后,我们就进入迭代法运用的实践环节。
首先,我们先来试试使用雅可比方法解线性方程组,雅克比迭代法是众多迭代法中比较早且较简单的一种。所以,作为迭代法的实践开篇比较合适。让我们设一个2×2的线性方程组:
Ax=b Ax=b Ax=b
KaTeX parse error: Undefined control sequence: \- at position 50: …u-v=4 \\\\\\ \̲-̲u+2 v=-2 \\en…
我们很容易就能得出这个方程组的解如下。
left[beginarrayluvendarrayright]=left[beginarrayl20endarrayright] \\left[\\begin{array}{l} u \\\\\\ v \\end{array}\\right]=\\left[\\begin{array}{l} 2 \\\\\\ 0 \\end{array}\\right] left[beginarrayluvendarrayright]=left[beginarrayl20endarrayright]
现在我们就用雅可比方法来看看怎么解这个方程组:
首先,我们把线性方程组转换成矩阵形式。
KaTeX parse error: Expected 'EOF', got '&' at position 34: …array}{cc} 2 &̲amp; -1 \\\\\\ …
接着,把A的对角线放在等式左边,得出SSS矩阵。
KaTeX parse error: Expected 'EOF', got '&' at position 36: …array}{ll} 2 &̲amp; 0 \\\\\\ …
其余部分移到等式右边,得出TTT矩阵。
KaTeX parse error: Expected 'EOF', got '&' at position 36: …array}{ll} 0 &̲amp; 1 \\\\\\ …
于是,雅可比迭代就可以表示成下面这样的形式。
mathrmSx_k+1=Tx_k+mathrmb \\mathrm{S} x\_{k+1}=T x\_{k}+\\mathrm{b} mathrmSx_k+1=Tx_k+mathrmb
KaTeX parse error: Expected '}', got 'EOF' at end of input: …ray}\\right.
现在是时候进行迭代了,我们从u_0=v_0=0u\_{0}=v\_{0}=0u_0=v_0=0开始。
left[beginarraylu_0v_0endarrayright]=left[beginarrayl00endarrayright] \\left[\\begin{array}{l} u\_{0} \\\\\\ v\_{0} \\end{array}\\right]=\\left[\\begin{array}{l} 0 \\\\\\ 0 \\end{array}\\right] left[beginarraylu_0v_0endarrayright]=left[beginarrayl00endarrayright]
第一次迭代后,我们得到:
KaTeX parse error: Undefined control sequence: \- at position 115: …} 2 \\\\\\ \̲-̲1 \\end{array…
第二次迭代后得到:
left[beginarraylu_2v_2endarrayright]=left[beginarraylfrac320endarrayright] \\left[\\begin{array}{l} u\_{2} \\\\\\ v\_{2} \\end{array}\\right]=\\left[\\begin{array}{l} \\frac{3}{2} \\\\\\ 0 \\end{array}\\right] left[beginarraylu_2v_2endarrayright]=left[beginarraylfrac320endarrayright]
第三次迭代后得到:
KaTeX parse error: Undefined control sequence: \- at position 115: …} 2 \\\\\\ \̲-̲\\frac{1}{4} …
第四次迭代后得到:
left[beginarraylu_4v_4endarrayright]=left[beginarraylfrac1580endarrayright] \\left[\\begin{array}{l} u\_{4} \\\\\\ v\_{4} \\end{array}\\right]=\\left[\\begin{array}{l} \\frac{15}{8} \\\\\\ 0 \\end{array}\\right] left[beginarraylu_4v_4endarrayright]=left[beginarraylfrac1580endarrayright]
第五次迭代后,我们得到:
KaTeX parse error: Undefined control sequence: \- at position 115: …} 2 \\\\\\ \̲-̲\\frac{1}{16} …
经过五次迭代后发现收敛,因为它的结果接近真实解。
真实解left[beginarrayl20endarrayright] 真实解 \\left[\\begin{array}{l} 2 \\\\\\ 0 \\end{array}\\right] 真实解left[beginarrayl20endarrayright]
现在,再来看一下错误等式,mathrmSe∗k+1=Te∗k\\mathrm{Se}*{k+1}=T e*{k}mathrmSe∗k+1=Te∗k,我们把SSS和TTT代入等式,得出:
KaTeX parse error: Expected 'EOF', got '&' at position 34: …array}{ll} 2 &̲amp; 0 \\\\\\ …
计算SSS的逆矩阵和TTT相乘S−1TS^{-1}TS−1T得出:
KaTeX parse error: Expected 'EOF', got '&' at position 43: …array}{cc} 0 &̲amp; \\frac{1}{…
这里,SSS的逆矩阵和T相乘S−1TS^{-1}TS−1T有特征值frac12\\frac{1}{2}frac12和−frac12-\\frac{1}{2}−frac12,所以,它的谱半径是rho(B)=frac12\\rho(B)=\\frac{1}{2}rho(B)=frac12。这里的谱半径是用来控制收敛的,所以非常重要。谱半径从数学定义上是:矩阵(或者有界线性算子的谱半径)是指其特征值绝对值集合的上确界。这个概念是不是很难理解?具体谱半径的概念你可以查互联网来获取,为了方便你理解,这里我还是用数学方法来简单表达一下。
KaTeX parse error: Expected 'EOF', got '&' at position 45: …array}{ll} 0 &̲amp; \\frac{1}{…
通过SSS的逆矩阵和TTT相乘S−1TS^{-1}TS−1T,我们得到:∣lambda∣_max=frac12|\\lambda|\_{\\max }=\\frac{1}{2}∣lambda∣_max=frac12,以及:
KaTeX parse error: Expected 'EOF', got '&' at position 34: …array}{cc} 0 &̲amp; \\frac{1}{…
这里的特征值frac12\\frac{1}{2}frac12非常小,所以10次迭代后,错误就很低了,即frac1102=frac11024\\frac{1^{10}}{2}=\\frac{1}{1024}frac1102=frac11024。而如果特征值是0.99或者0.999,那很显然迭代次数就要多得多,也就是说需要更多时间来做运算。
高斯-赛德尔方法实践
现在我们再来看下高斯-赛德尔方法,高斯-赛德尔迭代可以节约存储和加速迭代,每迭代一次只需一组存储单元,而雅可比迭代需要两组单元。
SSS取AAA的下三角部分,还是使用之前雅可比方法中的例子,我们得出方程组:
KaTeX parse error: Expected '}', got 'EOF' at end of input: …ray}\\right.
这里有一个比较大的变化,那就是u_ku\_{k}u_k消失了,通过v_kv\_{k}v_k,我们可以直接得到u_k+1u\_{k+1}u_k+1和v_k+1v\_{k+1}v_k+1,这样有什么好处呢?两大好处是显而易见的,就是节约存储和加速迭代。
接下来,我们从u_0=0u\_{0}=0u_0=0,v_0=−1v\_{0}=-1v_0=−1来测试一下迭代。
第一次迭代后,我们得到:
left[beginarraylu_1v_1endarrayright]=left[beginarraycfrac32frac−14endarrayright] \\left[\\begin{array}{l} u\_{1} \\\\\\ v\_{1} \\end{array}\\right]=\\left[\\begin{array}{c} \\frac{3}{2} \\\\\\ \\frac{-1}{4} \\end{array}\\right] left[beginarraylu_1v_1endarrayright]=left[beginarraycfrac32frac−14endarrayright]
第二次迭代后得到:
left[beginarraylu_2v_2endarrayright]=left[beginarraylfrac158frac−116endarrayright] \\left[\\begin{array}{l} u\_{2} \\\\\\ v\_{2} \\end{array}\\right]=\\left[\\begin{array}{l} \\frac{15}{8} \\\\\\ \\frac{-1}{16} \\end{array}\\right] left[beginarraylu_2v_2endarrayright]=left[beginarraylfrac158frac−116endarrayright]
第三次迭代后得到:
KaTeX parse error: Undefined control sequence: \- at position 128: …}{32} \\\\\\ \̲-̲\\frac{1}{64} …
经过三次迭代后发现收敛,因为第三次迭代后的结果接近真实解。
错误经过计算分别是−1,frac−14,frac−116,frac−164-1, \\frac{-1}{4}, \\frac{-1}{16}, \\frac{-1}{64}−1,frac−14,frac−116,frac−164,和刚才使用雅可比方法得出的错误2,frac12,frac18,frac1322, \\frac{1}{2}, \\frac{1}{8}, \\frac{1}{32}2,frac12,frac18,frac132。比较后我们可以发现,无论是迭代次数还是收敛速度方面,高斯-赛德尔方法比雅可比方法速度快、精确度也高得多。
逐次超松弛方法
最后,我们在高斯-赛德尔方法上做个小调整,在迭代中引入一个参数“omega”,ωωω,即超松弛因子。然后选择一个合适的ωωω,使得S−1TS^{-1}TS−1T的谱半径尽可能小,这个方法就叫做逐次超松弛方法(Successive over-relaxation method,简称SOR)。
SOR方法的方程是:ωAx=ωbωAx=ωbωAx=ωb,矩阵SSS有AAA的对角线,对角线下是ωAωAωA,等式右边TTT是S−ωAS-ωAS−ωA,于是,我们还是使用之前雅可比方法中的例子,得到SOR方程组如下。
KaTeX parse error: Undefined control sequence: \- at position 96: …omega \\\\\\ \̲-̲\\omega u\_{k+1…
是不是看起来更复杂了?
没关系,其实它只是在我们眼中看起来复杂,对计算机来说是没区别的。对SOR来说,只是多了一个ωωω,而ωωω选择越好就越快。具体ωωω的选择,以及迭代的过程就不赘述了,我给你一个小提示,你可以在“ωωω大于1”和“ωωω小于1”两种情况下来多选择几个ωωω进行尝试,最后你应该会得到结论:
- 在ωωω大于1时,ωωω越大,迭代的次数就越多,收敛速度就越慢,ωωω接近1时,迭代的次数越小,收敛速度越快。
- 在ωωω小于1时,ωωω越小,迭代的次数就越多,收敛速度就越慢,ωωω接近1时,迭代的次数越小,收敛速度越快。
所以,SOR迭代法的关键就是ωωω的选择,它可以被看作是高斯-赛德尔法的扩充。
雅可比法、高斯-赛德尔法,以及SOR迭代法都是定常迭代法。接下来我讲一下和定常迭代法不同的另一类方法,也是实践中用的比较多的方法——共轭梯度法(Conjugate gradient),它属于Krylov子空间方法。简单来说,Krylov子空间方法是一种 “降维打击” 手段,是一种牺牲精度换取速度的方法。
共轭梯度法
要讲共轭梯度法,我们要先解释一下“共轭”,共轭就是按一定的规律相配的一对,通俗点说就是孪生。“轭”是牛拉车用的木头,那什么是共轭关系呢?同时拉一辆车的两头牛,就是共轭关系。

我们根据这个定义再来解释一下共轭方向,向量p,qinRp, q \\in Rp,qinR, 若满足条件pAq=0pAq=0pAq=0, 则称ppp和qqq关于AAA是共轭方向,或者ppp和qqq关于AAA共轭。有了共轭和共轭方向的概念后,再来看共轭梯度法就简单多了。共轭梯度法的出现不仅是为了解决梯度下降法的收敛速度慢,而且也避免了牛顿法需要存储和计算黑塞矩阵(Hessian Matrix)并求逆的缺点。
现在来看看共轭梯度算法,设Ax=bAx=bAx=b,其中AAA是一个实对称正定矩阵。
首先,我们设初始值x_0x\_{0}x_0为000或者一个估计值,来计算r_0:=b−Ax_0r\_{0}:=b-A x\_{0}r_0:=b−Ax_0。如果r_0r\_{0}r_0非常小,那x_0x\_{0}x_0就是结果,如果不是就继续。
接下来设p_0:=r_0p\_{0}:=r\_{0}p_0:=r_0,k:=0k:=0k:=0。现在我们开始迭代循环。
a.计算alpha_k\\alpha\_{k}alpha_k 。
alpha_k:=fracr_kTr_kp_kTAp_k\\alpha\_{k}:=\\frac{r\_{k}^{T} r\_{k}}{p\_{k}^{T} A p\_{k}}alpha_k:=fracr_kTr_kp_kTAp_k
b.计算x_k+1x\_{k+1}x_k+1 。
x_k+1:=x_k+alpha_kp_kx\_{k+1}:=x\_{k}+\\alpha\_{k} p\_{k}x_k+1:=x_k+alpha_kp_k
c.计算r_k+1r\_{k+1}r_k+1。
r_k+1:=r_k−alpha_kAp_kr\_{k+1}:=r\_{k}-\\alpha\_{k} A p\_{k}r_k+1:=r_k−alpha_kAp_k
d.如果r_k+1r\_{k+1}r_k+1非常小,循环结束,如果不是就继续。
e.计算β_kβ\_{k}β_k 。
beta_k:=fracr_k+1Tr_k+1r_kTr_k\\beta\_{k}:=\\frac{r\_{k+1}^{T} r\_{k+1}}{r\_{k}^{T} r\_{k}}beta_k:=fracr_k+1Tr_k+1r_kTr_k
f.计算p_k+1p\_{k+1}p_k+1 。
p_k+1:=r_k+1+beta_kp_kp\_{k+1}:=r\_{k+1}+\\beta\_{k} p\_{k}p_k+1:=r_k+1+beta_kp_k
g.k:=k+1k:=k+1k:=k+1。
- 返回结果x_k+1x\_{k+1}x_k+1。
从算法中我们可以看出,共轭梯度法的优点是存储量小和具有步收敛性。如果你熟悉MATLAB,就会发现共轭梯度法的实现超级简单,只需要短短十几行代码(下方代码来自于MATLAB/GNU Octave的例子)。
function x = conjgrad(A, b, x)
r = b - A * x;
p = r;
rsold = r' * r;
for i = 1:length(b)
Ap = A * p;
alpha = rsold / (p' * Ap);
x = x + alpha * p;
r = r - alpha * Ap;
rsnew = r' * r;
if sqrt(rsnew) < 1e-10
break;
end
p = r + (rsnew / rsold) * p;
rsold = rsnew;
end
end
机器学习中的共轭梯度
共轭梯度法经常被用在训练神经网络中,在实践中已经证明,它是比梯度下降更有效的方法,因为就像刚才讲的,它不需要计算黑塞矩阵。那我现在就来讲一讲,使用共轭梯度法的神经网络训练过程。
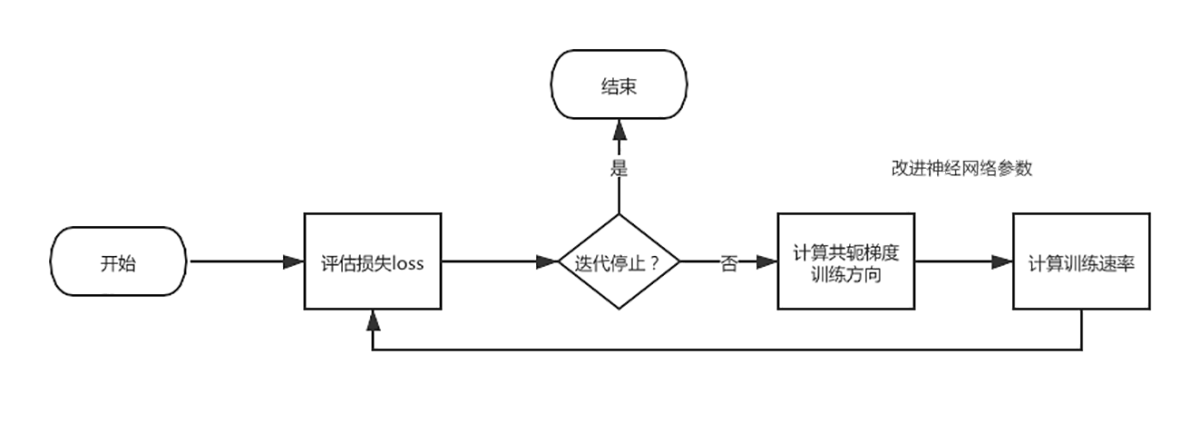
在整个训练过程中,参数改进是重点,当然这也是所有神经网络训练的重点。这个过程是通过计算共轭梯度的训练方向,然后计算训练速率来实现的。在共轭梯度训练算法中,搜索是按共轭方向进行的,也就是说,训练方向是共轭的。所以,收敛速度比梯度下降要快。
现在我们来看训练方向的计算方法。首先,我们设置训练方向向量为ddd,然后,定义一个初始参数向量w0w^{0}w0,以及一个初始训练方向向量d0=−g0d^{0}=-g^{0}d0=−g0,于是,共轭梯度法构造出的训练方向可以表示成:di+1=gi+1+dicdotgammaid^{i+1}=g^{i+1}+d^{i} \\cdot \\gamma^{i}di+1=gi+1+dicdotgammai。
其中,ggg是梯度向量,γγγ是共轭参数。参数通过这个表达式来更新和优化。通常训练速率eta\\etaeta可使用单变量函数优化方法求得。
wi+1=wi+dicdotetaiw^{i+1}=w^{i}+d^{i} \\cdot \\eta^{i}wi+1=wi+dicdotetai
本节小结
好了,到这里数值线性代数的迭代法这一讲就结束了,最后我再总结一下前面讲解的内容。
首先,我先解释了数值线性代数,接着再整体讲解了迭代方法。然后,举了一个线性方程组的例子,运用迭代法中的几个比较著名的实践方法:雅可比方法、高斯-赛德尔方法,以及逐次超松弛方法,来解这个线性方程组。最后,我把共轭梯度法用在了深度学习的神经网络训练中。
希望你能在了解了数值线性代数,以及迭代法后,更多地在计算机科学领域中,运用迭代法做矩阵运算。如果有兴趣,你也可以学习其它在实践中使用的迭代法。
线性代数练习场
练习时刻到了,这次继续使用第一篇线性方程组里的例子,你可以挑选任意一个迭代法来求解这个线性方程组。
假设,一个旅游团由孩子和大人组成,去程时他们一起坐大巴,每个孩子的票价3元,大人票价3.2元,总共花费118.4元。回程时一起做火车,每个孩子的票价3.5元,大人票价3.6元,总共花费135.2元。请问这个旅游团中有多少孩子和大人?
设小孩人数为x_1x\_{1}x_1,大人人数为x_2x\_{2}x_2,于是我们得到了一个方程组:
KaTeX parse error: Expected '}', got 'EOF' at end of input: …{array}\\right.
这个方程组的解是:
KaTeX parse error: Expected '}', got 'EOF' at end of input: …{array}\\right.
你可以计算一下多少次迭代后它能收敛,也就是逼近真实解?以及它的错误eee又分别是多少?
欢迎在留言区晒出的你的运算过程和结果。如果有收获,也欢迎你把这篇文章分享给你的朋友。
- qinsi 👍(1) 💬(1)
既然共轭梯度法在训练神经网络时被证明比梯度下降更有效,那为什么现在主流的深度学习框架中都没有提供共轭梯度的优化方法呢?
2020-08-31 - fei 👍(2) 💬(0)
共轭的中文含义读了这篇才算是知道了。数值计算的介绍,高屋建瓴。很赞! 文中有一段公式排版出错了: “现在,再来看一下错误等式,$\mathrm{Se}{k+1}=T e{k},我们把S和T$ 代入等式”
2022-01-21 - 杨宇 👍(0) 💬(0)
雅克比方法,“其余部分移到等式右边,得出 T 矩阵”——这一步能详细说说吗?
2022-06-30

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 18
18 0
0- 0



 已为社区贡献60条内容
已为社区贡献60条内容

所有评论(0)