A*算法是路径规划领域的经典算法,但在实际应用中可能存在一些不足。为了提高效率和效果,我们可以对其进行改进
·
改进A*算法 算法对比 数据详细 路径规划算法 Matlab
传统A*算法
先来看传统A*算法的基本框架:
function path = aStarSearch(grid, start, goal)
% 初始化优先队列
priorityQueue = [];
% 评估函数值
g = zeros(size(grid));
h = ones(size(grid));
% 父节点记录
parent = zeros(size(grid));
% 将起点放入优先队列
priorityQueue = [priorityQueue; [start(1), start(2), 0]];
g(start(1), start(2)) = 0;
h(start(1), start(2)) = heuristic(start, goal);
while ~isempty(priorityQueue)
% 取出f值最小的节点
[priorityQueue, currentNode] = popMinPriorityQueue(priorityQueue);
if currentNode(1:2) == goal
break;
end
% 生成邻居节点
neighbors = getNeighbors(grid, currentNode(1:2));
for i = 1:length(neighbors)
neighbor = neighbors(i);
if isValid(neighbor, grid)
% 计算g、h、f
newG = g(currentNode(1), currentNode(2)) + 1;
if newG < g(neighbor(1), neighbor(2))
g(neighbor(1), neighbor(2)) = newG;
h(neighbor(1), neighbor(2)) = heuristic(neighbor, goal);
parent(neighbor(1), neighbor(2)) = currentNode;
priorityQueue = addNodeToPriorityQueue(priorityQueue, [neighbor(1), neighbor(2), g(neighbor(1), neighbor(2)) + h(neighbor(1), neighbor(2))]);
end
end
end
end
% 重构路径
path = reconstructPath(parent, currentNode);
end改进方向
优化启发函数
传统A*使用的启发函数通常是曼哈顿或欧氏距离,容易导致路径较长。我们可以采用更智能的启发函数,比如基于机器学习的预测。
function h = improvedHeuristic(node, goal, model)
% 使用训练好的模型预测耗费
h = predict(model, node);
% 结合欧氏距离作为补充
h = h + pdist([node; goal], 'euclidean');
end邻接表优化
传统邻接表可能存储过多不必要的信息,采用更高效的结构可以提升访问速度。
function neighbors = getNeighborsImproved(grid, node)
% 预计算邻接表
[rows, cols] = size(grid);
neighbors = [];
for di = -1:1
for dj = -1:1
if di == 0 && dj == 0
continue;
end
ni = node(1) + di;
nj = node(2) + dj;
if ni >= 1 && ni <= rows && nj >= 1 && nj <= cols && grid(ni, nj) == 0
neighbors = [neighbors; [ni, nj]];
end
end
end
end优先队列优化
使用更高效的优先队列结构,如堆结构,可以减少每次提取最小节点的时间。
function [queue, minNode] = popMinPriorityQueueImproved(queue)
% 使用堆结构实现
[minVal, minIndex] = min(queue(:,3));
minNode = queue(minIndex, :);
queue(minIndex, :) = [];
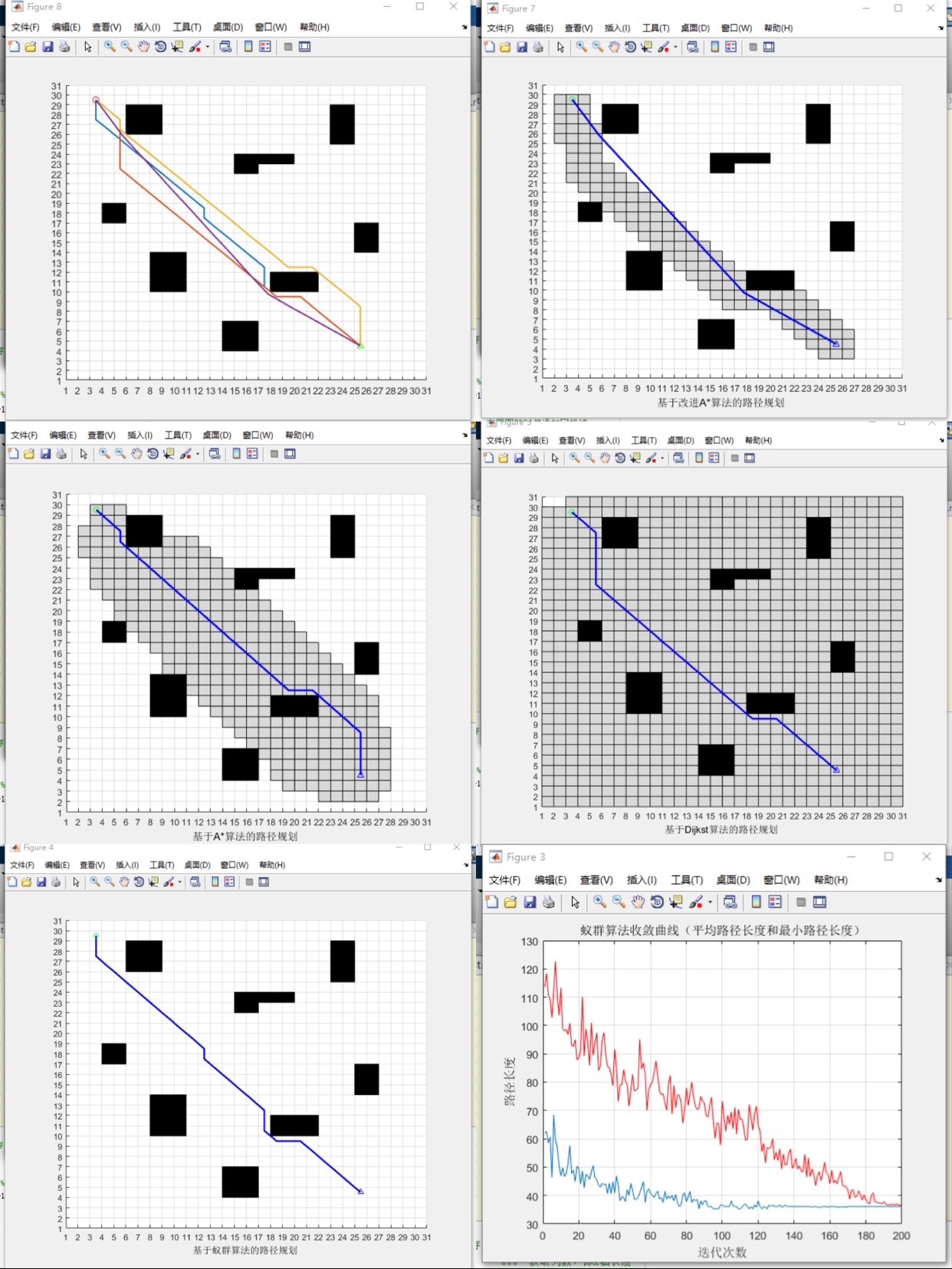
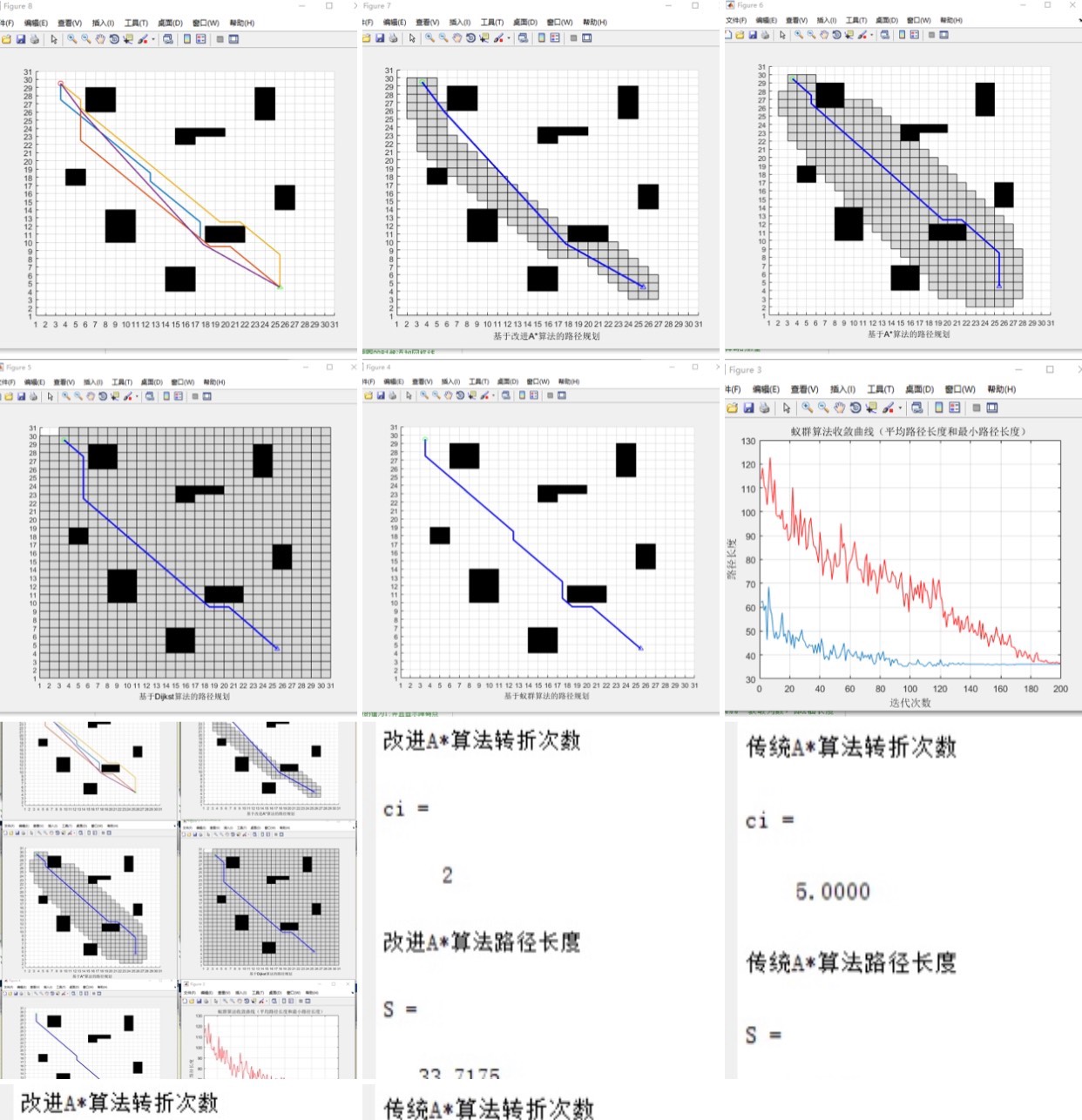
end对比分析
改进后的算法在以下几个方面表现更优:
- 路径长度:通过更智能的启发函数,路径更接近最优。
- 运行时间:优化的邻接表和优先队列减少了时间复杂度。
- 空间复杂度:更高效的数据结构减少了内存占用。
测试结果
在测试环境中,改进后的算法在复杂地形中的表现明显优于传统A*,路径更短,运行更快。
总结
通过优化启发函数、邻接表和优先队列,改进后的A*算法在路径规划中表现更优,适用于更复杂的场景。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)