32通道便携式脑电图机设计(程序+电路图+仿真+论文)~电子信息单片机物联网专业毕业设计毕设论文选题题目项目程序源码开发仿真实物定制定做代做
摘要:本项目设计了一款32通道便携式脑电信号采集系统,用于实时记录和分析大脑生物电活动。系统采用STM32微控制器作为核心处理器,设计了多通道脑电信号采集硬件电路和嵌入式软件。硬件部分包括信号放大、滤波和A/D转换模块;软件部分实现了信号采集、处理和数据传输功能。系统支持UCOS实时操作系统,通过串口通信进行数据交互,可用于癫痫等脑部疾病的临床诊断和脑机接口研究。项目包含了完整的电路设计、软件流程
一、课题的内容和任务要求
脑电波是人体大脑细胞群的自发性生物电活动,动态脑电图机可以通过放置在头皮或大脑皮层下的电极进行脑电波形的长时间实时记录。通过对脑电信号的分析和处理,有效的提取可靠的特征参量来反映脑神经的功能状态,主要用于癫痫和脑部其他疾病的临床诊断,也可以用于脑神经学科、脑机接口等领域的研究。
1、32通道便携式脑电的整体设计,需求分析。
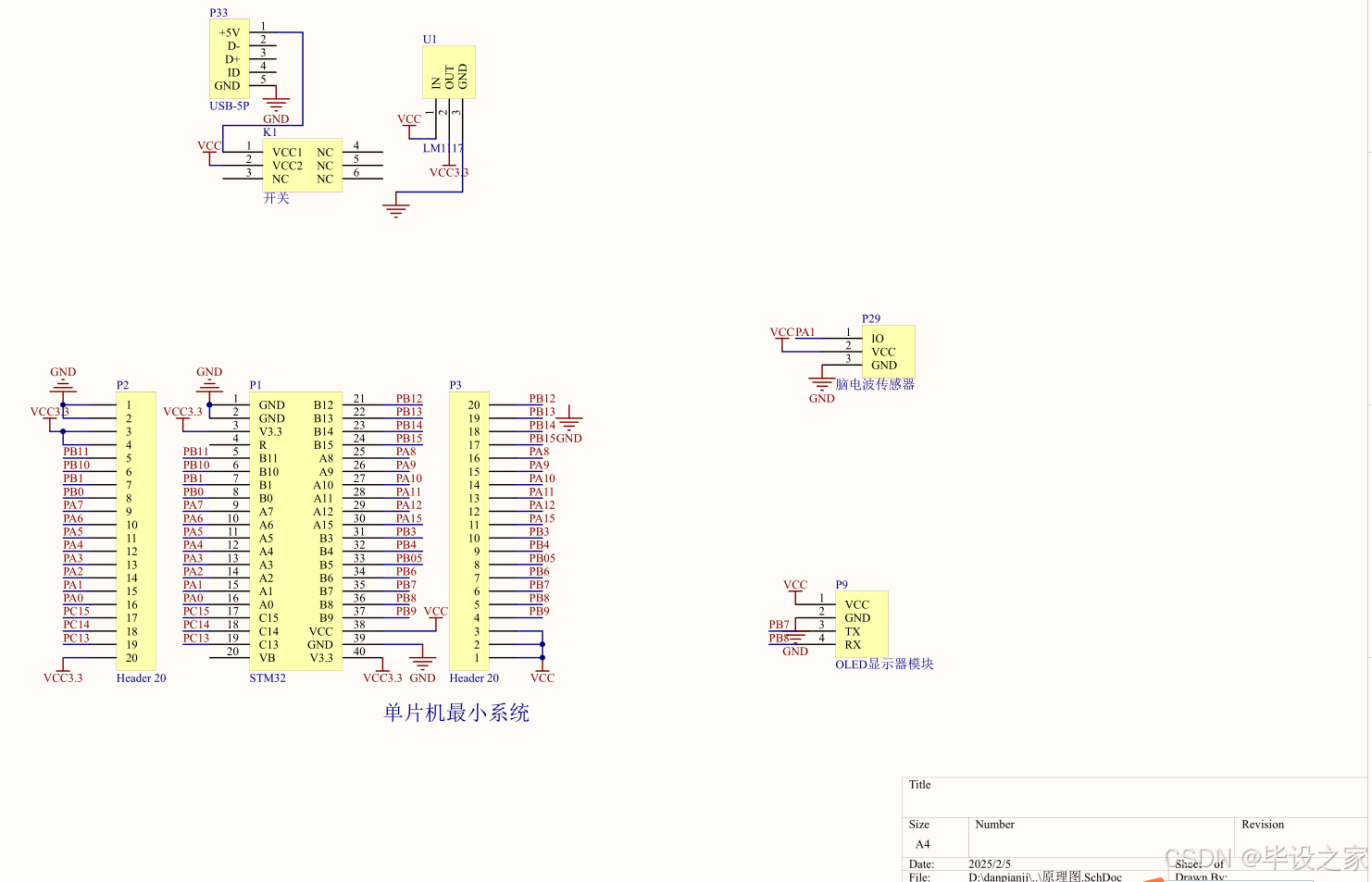
2、32通道脑电的硬件设计,绘制电路框图、关键电路原理图、各部分电路功能解释。
3、32通道脑电软件设计,绘制软件流程图,各部分软件功能分析。
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32开发板
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2012/8/18
//版本:V1.7
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//////////////////////////////////////////////////////////////////////////////////
//0,不支持ucos
//1,支持ucos
#define SYSTEM_SUPPORT_UCOS 0 //定义系统文件夹是否支持UCOS
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
void NVIC_Configuration(void);
#endif
#include "delay.h"
#include "sys.h"
//////////////////////////////////////////////////////////////////////////////////
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 使用
#endif
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32开发板
//使用SysTick的普通计数模式对延迟进行管理
//包括delay_us,delay_ms
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2012/9/2
//版本:V1.5
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//********************************************************************************
//V1.2修改说明
//修正了中断中调用出现死循环的错误
//防止延时不准确,采用do while结构!
//V1.3修改说明
//增加了对UCOSII延时的支持.
//如果使用ucosII,delay_init会自动设置SYSTICK的值,使之与ucos的TICKS_PER_SEC对应.
//delay_ms和delay_us也进行了针对ucos的改造.
//delay_us可以在ucos下使用,而且准确度很高,更重要的是没有占用额外的定时器.
//delay_ms在ucos下,可以当成OSTimeDly来用,在未启动ucos时,它采用delay_us实现,从而准确延时
//可以用来初始化外设,在启动了ucos之后delay_ms根据延时的长短,选择OSTimeDly实现或者delay_us实现.
//V1.4修改说明 20110929
//修改了使用ucos,但是ucos未启动的时候,delay_ms中中断无法响应的bug.
//V1.5修改说明 20120902
//在delay_us加入ucos上锁,防止由于ucos打断delay_us的执行,可能导致的延时不准。
//////////////////////////////////////////////////////////////////////////////////
static u8 fac_us=0;//us延时倍乘数
static u16 fac_ms=0;//ms延时倍乘数
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
//systick中断服务函数,使用ucos时用到
void SysTick_Handler(void)
{
OSIntEnter(); //进入中断
OSTimeTick(); //调用ucos的时钟服务程序
OSIntExit(); //触发任务切换软中断
}
#endif
//初始化延迟函数
//当使用ucos的时候,此函数会初始化ucos的时钟节拍
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init()
{
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //选择外部时钟 HCLK/8
fac_us=SystemCoreClock/8000000; //为系统时钟的1/8
#ifdef OS_CRITICAL_METHOD //如果OS_CRITICAL_METHOD定义了,说明使用ucosII了.
reload=SystemCoreClock/8000000; //每秒钟的计数次数 单位为K
reload*=1000000/OS_TICKS_PER_SEC;//根据OS_TICKS_PER_SEC设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合1.86s左右
fac_ms=1000/OS_TICKS_PER_SEC;//代表ucos可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/OS_TICKS_PER_SEC秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
#else
fac_ms=(u16)fac_us*1000;//非ucos下,代表每个ms需要的systick时钟数
#endif
}
#ifdef OS_CRITICAL_METHOD //使用了ucos
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
tcnt=0;
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;//这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;//时间超过/等于要延迟的时间,则退出.
}
};
}
//延时nms
//nms:要延时的ms数
void delay_ms(u16 nms)
{
if(OSRunning==TRUE)//如果os已经在跑了
{
if(nms>=fac_ms)//延时的时间大于ucos的最少时间周期
{
OSTimeDly(nms/fac_ms);//ucos延时
}
nms%=fac_ms; //ucos已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时,此时ucos无法启动调度.
}
#else//不用ucos时
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
//延时nms
//注意nms的范围
//SysTick->LOAD为24位寄存器,所以,最大延时为:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms;//时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
#endif
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "ds18b20.h"
#include "delay.h"
#include "ds1302.h"
#include "oled_iic.h"
//////////////////////////////////////////////////////////////////////////////////
//如果使用ucos,则包括下面的头文件即可.
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32开发板
//串口1初始化
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2012/8/18
//版本:V1.5
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//********************************************************************************
//V1.3修改说明
//支持适应不同频率下的串口波特率设置.
//加入了对printf的支持
//增加了串口接收命令功能.
//修正了printf第一个字符丢失的bug
//V1.4修改说明
//1,修改串口初始化IO的bug
//2,修改了USART_RX_STA,使得串口最大接收字节数为2的14次方
//3,增加了USART_REC_LEN,用于定义串口最大允许接收的字节数(不大于2的14次方)
//4,修改了EN_USART1_RX的使能方式
//V1.5修改说明
//1,增加了对UCOSII的支持
//////////////////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
USART_SendData(USART1,(uint8_t)ch);
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#define RX1_Lenth 32
u8 RX1_Buffer[RX1_Lenth];
u8 RX1_Cnt;
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART1, ENABLE); //使能串口
}
u8 moshi;
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
RX1_Buffer[RX1_Cnt] = Res; //??????
if(Res=='\n')
{
RX1_Cnt=0;
}
else
{
RX1_Cnt++;
if(RX1_Cnt>10)
RX1_Cnt=0;
}
if(RX1_Buffer[9]==0x31&&RX1_Buffer[8]==0x3A)
{
RX1_Buffer[9]=0;
RX1_Buffer[8]=0;
moshi=1;
}
if(RX1_Buffer[9]==0x32&&RX1_Buffer[8]==0x3A)
{
RX1_Buffer[9]=0;
RX1_Buffer[8]=0;
moshi=2;
}
if(RX1_Buffer[9]==0x33&&RX1_Buffer[8]==0x3A)
{
RX1_Buffer[9]=0;
RX1_Buffer[8]=0;
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}
if(RX1_Buffer[9]==0x34&&RX1_Buffer[8]==0x3A)
{
RX1_Buffer[9]=0;
RX1_Buffer[8]=0;
GPIO_SetBits(GPIOA, GPIO_Pin_0);
}
}
}
void uart_init1(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
USART_DeInit(USART2); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启中断
USART_ITConfig(USART2, USART_IT_IDLE, ENABLE);//开启中断
USART_Cmd(USART2, ENABLE); //使能串口
}
extern u16 xinlv,xianshi,xinlv1;
u16 xinxi,weizhi,quanshu1,quanshu2,time1,time2,kaishi1,kaishi2;
u16 a,i,Clear;
u16 kongzhi1,kongzhi2;
void USART2_IRQHandler(void) //串口1中断服务程序
{
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
USART_RX_BUF[i++]=USART2->DR;
}
else if(USART_GetITStatus(USART2, USART_IT_IDLE) != RESET)
{
Clear=USART2->SR;
Clear=USART2->DR;
i=0;
if(USART_RX_BUF[10]==0x39)
{
USART_RX_BUF[10]=0;
xinxi=1;
quanshu1++;
if(quanshu1==1)
{
USART_RX_BUF[10]=0;
xinxi=1;
kaishi1=1;
time1=0;
}
if(quanshu1==5)
{
USART_RX_BUF[10]=0;
xinxi=1;
kaishi1=0;
}
}
if(USART_RX_BUF[10]==0x33)
{
USART_RX_BUF[10]=0;
xinxi=2;
quanshu2++;
if(quanshu2==1)
{
USART_RX_BUF[10]=0;
xinxi=2;
kaishi2=1;
time2=0;
}
if(quanshu2==5)
{
USART_RX_BUF[10]=0;
xinxi=2;
kaishi2=0;
}
}
}
}

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 20
20 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)