基于视觉规划焊接路径并进行运动——ROS2焊接机械臂(完结)
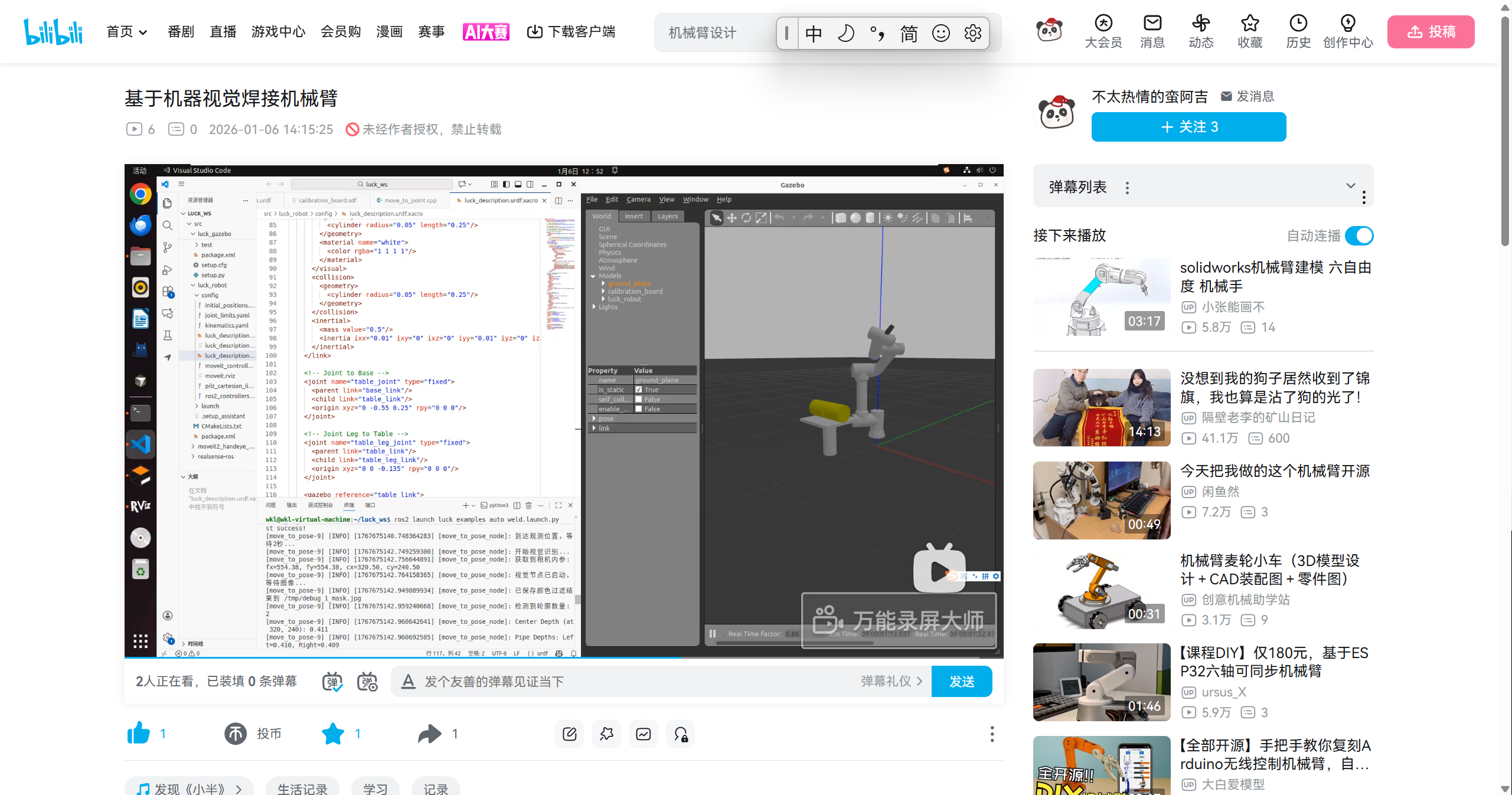
摘要:该研究在Gazebo和RViz中搭建了焊接仿真环境,包含白色工作台和预留间隙的黄色钢管。通过控制机械臂进行视觉扫描获取环境数据,规划末端执行器运动轨迹,完成焊接工艺仿真。相关演示视频和源文件可通过指定方式获取。
·
首先在Gazebo和RViz中搭建仿真环境,添加白色工作台和两根黄色焊接钢管(中间预留焊缝间隙)。随后控制机械臂移动到预设位置进行视觉深度扫描,获取环境数据用于规划末端执行器的运动轨迹。最后调整末端姿态参数,完成焊接工艺的仿真模拟。
B站视频: https://www.bilibili.com/video/BV1kcqcBwEJ1/?share_source=copy_web&vd_source=9bd25cf8adb0a3d2b0c7a58c38710a2c

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)