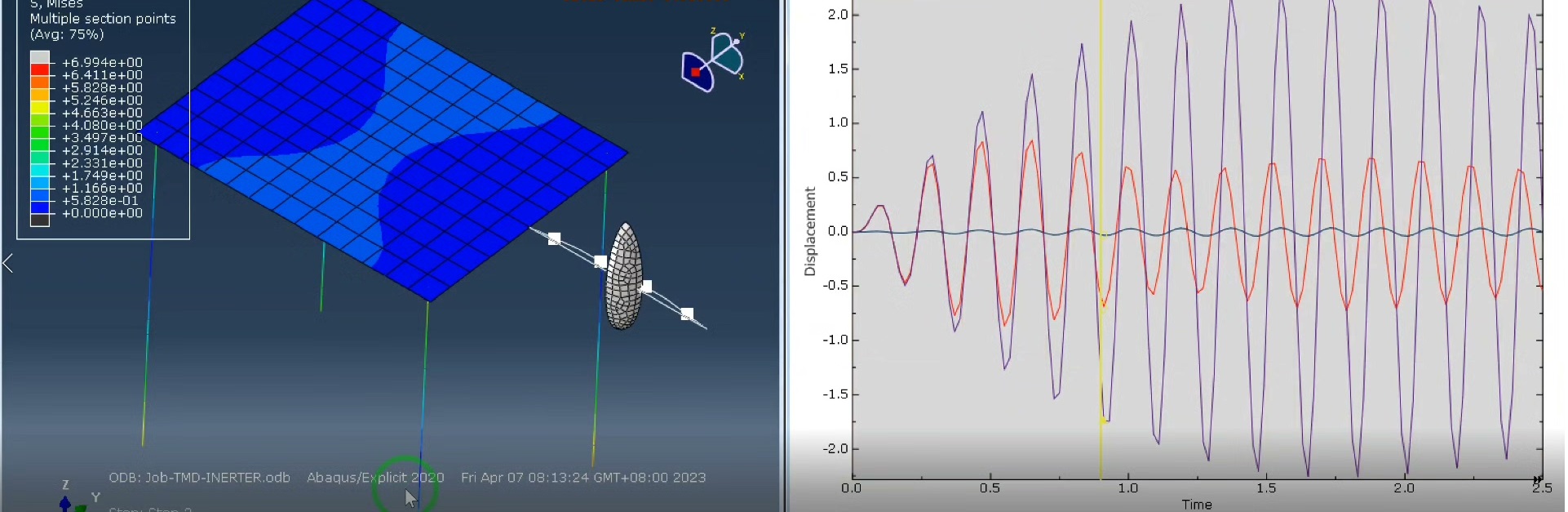
Abaqus仿真丝杠模拟飞轮系统,生成结构调谐质量阻尼器和惯容器,详解螺距与转动惯量
比如你想用丝杠螺距和飞轮转动惯量来模拟惯容系数,本质上是在玩“机械系统”和“参数耦合”的游戏。先从一个简单案例说起:假设要在建筑结构顶部加个TMD,同时用丝杠飞轮结构实现惯容器,怎么在Abaqus里快速搭出模型?假设丝杠螺距p=5mm,飞轮J=0.02 kg·m²,那么b=0.02/(0.005)^2=800 kg。abaqus生成结构调谐质量阻尼器和惯容器,模拟丝杠螺距,飞轮转动惯量,惯容系数。
abaqus生成结构调谐质量阻尼器和惯容器,模拟丝杠螺距,飞轮转动惯量,惯容系数。 视频讲解
在Abaqus里折腾结构振动控制装置,尤其是调谐质量阻尼器(TMD)和惯容器,这事儿其实挺有意思。比如你想用丝杠螺距和飞轮转动惯量来模拟惯容系数,本质上是在玩“机械系统”和“参数耦合”的游戏。先从一个简单案例说起:假设要在建筑结构顶部加个TMD,同时用丝杠飞轮结构实现惯容器,怎么在Abaqus里快速搭出模型?
TMD的基础建模
调谐质量阻尼器说白了就是个弹簧+质量块+阻尼器的组合。Abaqus里可以直接用Connector单元实现。比如用下面这段Python脚本快速生成一个带弹簧的质点:
mdb.models['Model-1'].ConnectorSection(name='SpringDamper',
translationalType=AXIAL)
mdb.models['Model-1'].sections['SpringDamper'].setValues(
behaviorOptions=(ConnectorElasticity(components=(1, ),
table=((1000.0, ), )), ConnectorDamping(components=(1, ),
table=((50.0, ), ))))这里定义了一个轴向弹簧刚度为1000N/m,阻尼50Ns/m的连接器。关键在于translationalType=AXIAL指定了轴向运动,而behaviorOptions里堆叠了弹性与阻尼属性。
丝杠螺距与惯容系数
惯容器的核心参数是惯容系数b= (飞轮转动惯量J)/(丝杠螺距p)^2。假设丝杠螺距p=5mm,飞轮J=0.02 kg·m²,那么b=0.02/(0.005)^2=800 kg。在建模时,丝杠的螺旋运动需要用耦合运动来实现:
part = mdb.models['Model-1'].Part(name='Screw', dimensionality=THREE_D)
sketch = part.sketches['__profile__']
sketch.CircleByCenterPerimeter(center=(0, 0), point1=(5, 0)) # 半径5mm
part.WireSpline(points=((0,0,0), (0,0,5)), ) # 螺距5mm这段代码画了个半径为5mm的圆,并用样条线生成螺旋轨迹。实际操作中可能需要用Equation Constraint或Connector Motion来关联旋转和平移自由度。
abaqus生成结构调谐质量阻尼器和惯容器,模拟丝杠螺距,飞轮转动惯量,惯容系数。 视频讲解
飞轮转动惯量的坑
飞轮建模最容易被忽略的是转动惯量的方向。比如一个实心圆盘的J=0.5mr²,但在Abaqus中需要明确惯性主轴:
assembly = mdb.models['Model-1'].rootAssembly
wheel = assembly.Instance(name='Wheel', part=part)
mdb.models['Model-1'].engineeringFeatures.Inertia(name='Inertia-1',
region=wheel.sets['Set-Wheel'],
massMomentInertia=(0.02, 0.02, 0.04)) # I11, I22, I33这里massMomentInertia参数对应三个主轴的转动惯量。如果飞轮的旋转轴是Z方向,则I33对应绕Z轴的惯量。
动力学分析设置
当TMD和惯容器组合时,建议用Modal Dynamics分析步。重点检查边界条件是否允许丝杠的旋转-平移耦合:
mdb.models['Model-1'].ModalStep(name='Step-1', previous='Initial')
mdb.models['Model-1'].steps['Step-1'].setValues(numEigen=10)
mdb.models['Model-1'].FrequencyStep(name='Step-2', previous='Step-1',
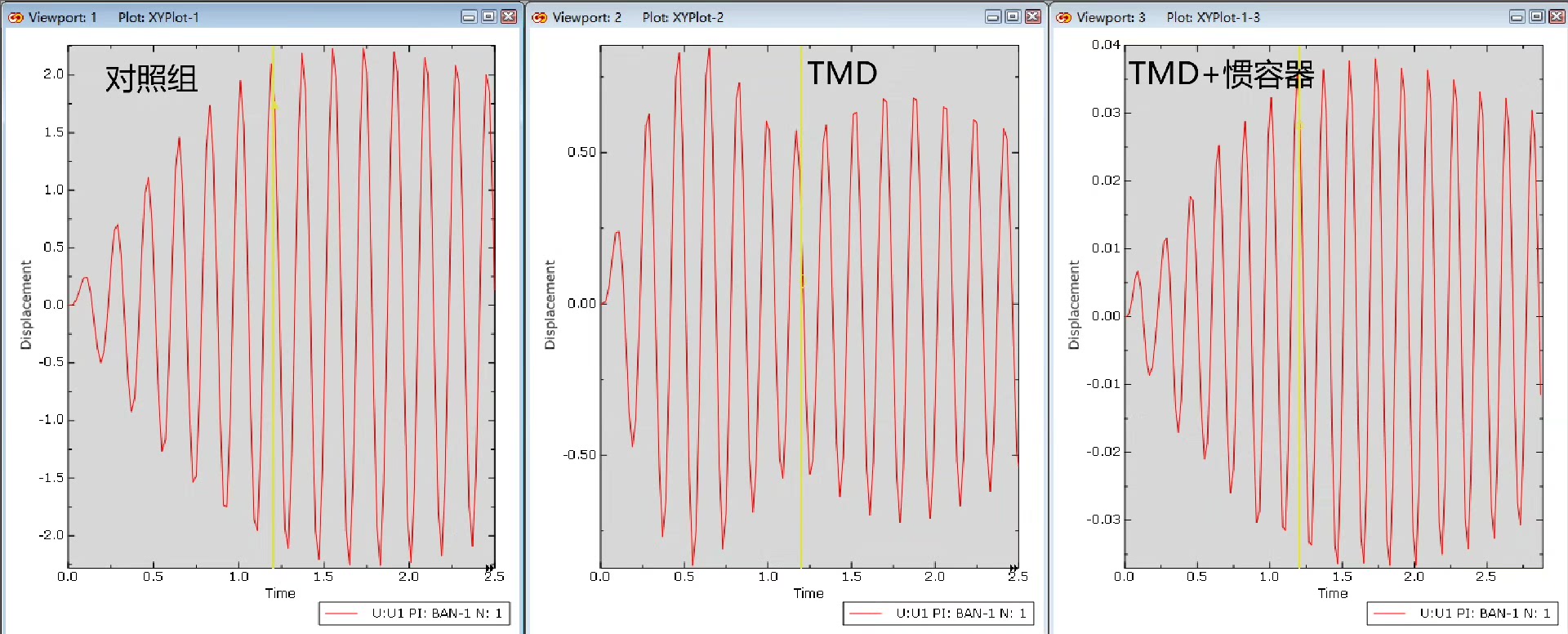
numEigen=10)先用模态分析确定结构固有频率,再用显式动力学看瞬态响应。惯容器的影响通常会在低频模态中更明显。
调试技巧
- 惯容器效果不明显?检查丝杠的运动耦合是否生效——尝试在Connector属性里加旋转自由度
- 飞轮不转动?确认惯性矩方向是否正确,或者是否被其他约束锁死
- 用Field Output监控丝杠的旋转角速度和位移,计算实际惯容系数是否匹配理论值
最后提一嘴,这类模型的收敛性很依赖接触定义。如果飞轮和丝杠之间有摩擦,建议先用Penalty Contact试算,再切到更精确的Kinematic Contact。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)