2D视觉技术和激光雷达识别托盘的局限性
随着工业4.0的推进,智能化物流设备的需求日益增长,智能叉车作为仓储物流系统的关键组成部分,要求具备高度自主性和高效的作业能力。传统技术在应对多样化的托盘和复杂环境变化时,往往需要大量的调试和人工干预,增加了运维成本。定位精度与速度的平衡难题:在工业应用中,托盘识别不仅要求高精度,还需要具备较快的响应速度以适应高效的物流需求。复杂环境下的识别能力不足:传统的2D视觉系统在识别不同光照条件、复杂背景
·
随着工业4.0的推进,智能化物流设备的需求日益增长,智能叉车作为仓储物流系统的关键组成部分,要求具备高度自主性和高效的作业能力。要实现这一目标,叉车需要能够准确识别和操作托盘,确保物料搬运的精度与效率。

2D视觉技术和激光雷达识别托盘的局限性
-
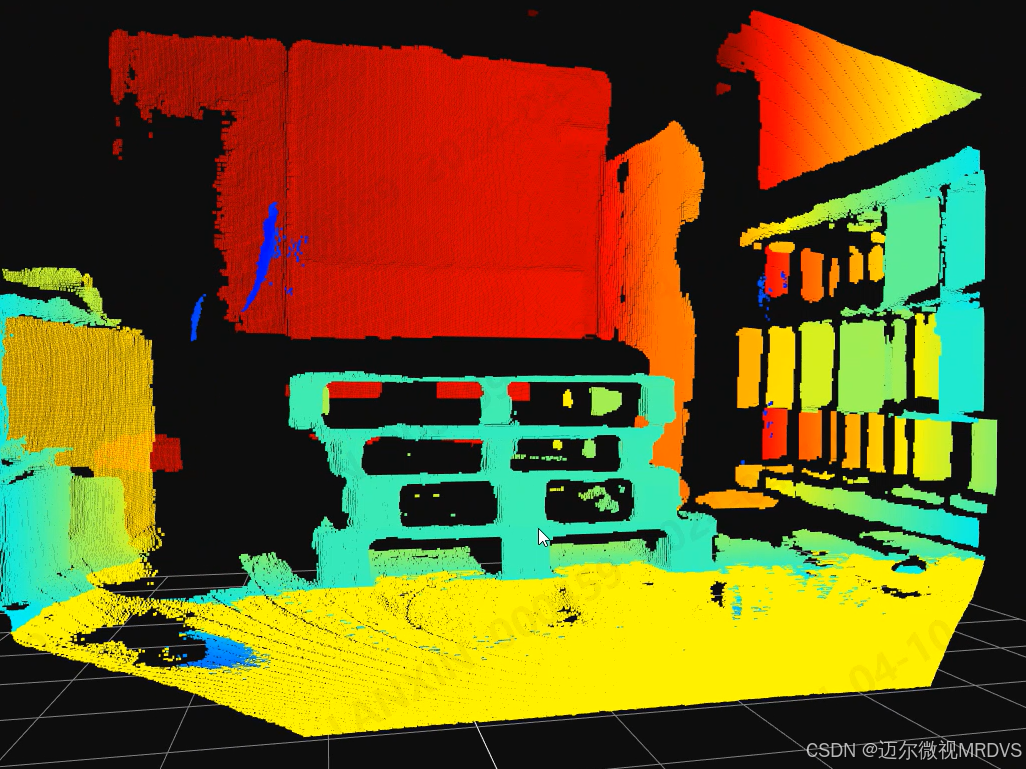
复杂环境下的识别能力不足:传统的2D视觉系统在识别不同光照条件、复杂背景和高密度堆叠托盘时,表现出识别率低、误报率高的缺陷,难以应对三维空间中的位姿识别任务。
-
缺乏鲁棒性与灵活性:在实际应用中,托盘的形状、颜色和材质各异,这要求识别系统具有高度的自适应能力。传统技术在应对多样化的托盘和复杂环境变化时,往往需要大量的调试和人工干预,增加了运维成本。
-
定位精度与速度的平衡难题:在工业应用中,托盘识别不仅要求高精度,还需要具备较快的响应速度以适应高效的物流需求。传统的定位系统在提升精度时,通常需要增加计算量,从而影响系统的实时性。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)