基于LabVIEW的运动控制与机器视觉协同系统:双卡控制、高精度组装作业与模块化软件架构源码
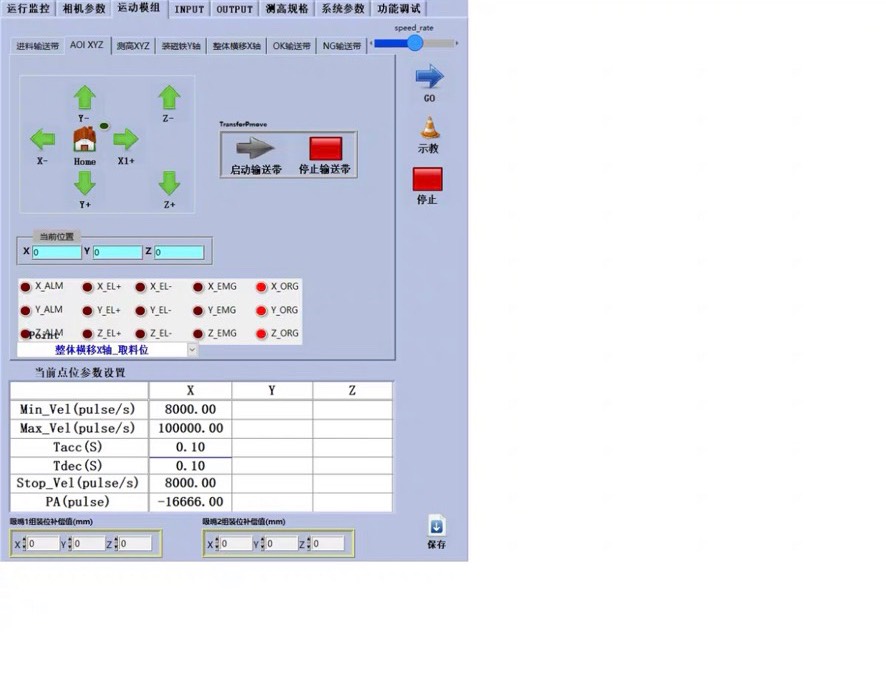
当设备启动时,轴组以0.1mm重复定位精度执行同步插补,视觉系统同时处理上下相机的20000像素点云数据。咱们的代码架构里有个特别有意思的并发处理模块——通过LabVIEW的队列状态机实现多工位协同。代码里随处可见的彩蛋式注释是调试时留下的宝藏,比如在某段急停处理逻辑旁写着:"此处曾导致三月飞雪般的误触发,现已用硬件滤波+软件去抖双重防护"。这里用了非阻塞式指令发送配合状态轮询,注意Yield()
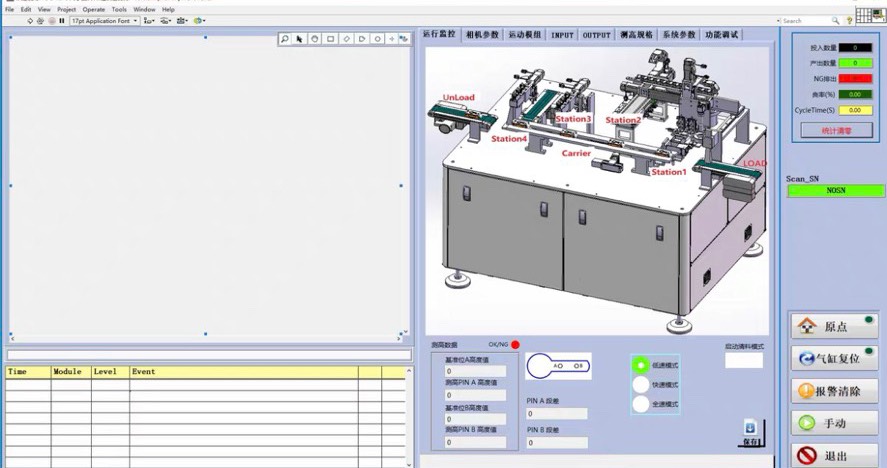
LabVIEW运动控制+机器视觉源码。 设备用到两张雷赛运动控制卡11个轴和海康上下相机定位进行高速高精度组装作业。 同时使用基恩士GT -H10高精度数字传感器进行产品组装后检查。 设备多个工位协同作业,并发进行,对软件架构要求极高。 软件模块化设计和必要的注释增加了可读性,需要的同学可以联系学习借鉴。 代码为本人100%,供源代码,源代码需要2018版本或更高版本可打开
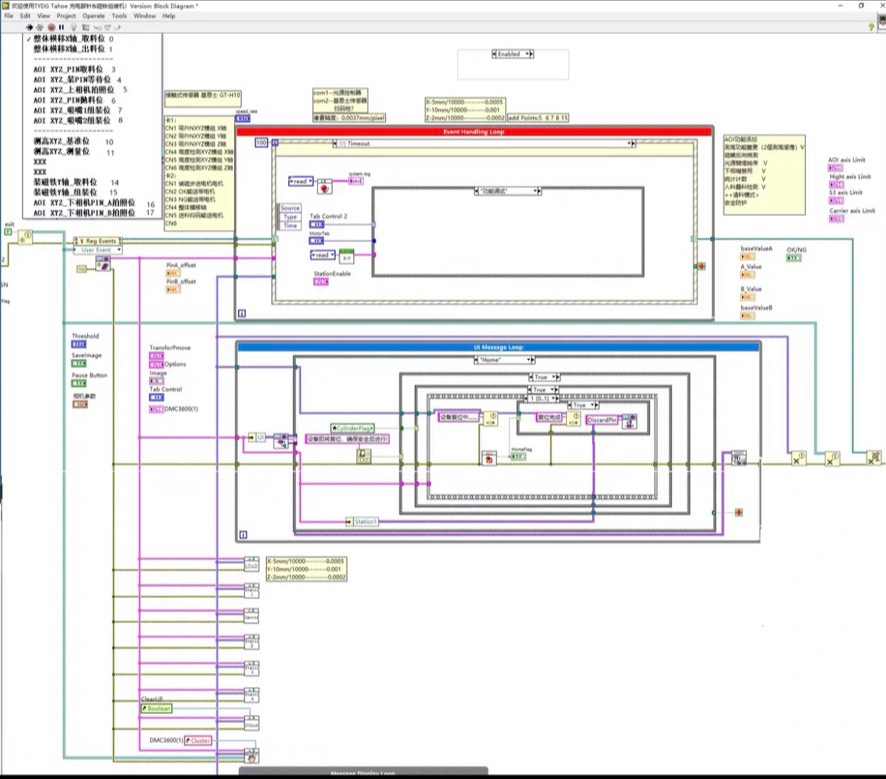
项目里用到了两张雷赛DMC-3000系列控制卡驱动11个伺服轴,搭配海康MV-CA050-10GC工业相机做双工位视觉引导。当设备启动时,轴组以0.1mm重复定位精度执行同步插补,视觉系统同时处理上下相机的20000像素点云数据。咱们的代码架构里有个特别有意思的并发处理模块——通过LabVIEW的队列状态机实现多工位协同。比如这个运动控制指令发送的代码段:
//轴组直线插补
DMC_LinearInterpolation(axisMask, xPos, yPos, velocity, accel,
decel, SV_START_MODE, &cmdIndex);
While (DMC_CheckCommandDone(axisMask, cmdIndex) == BUSY) {
Yield(); //释放CPU防止界面卡死
If (EmergencyStop) break; //急停中断处理
}这里用了非阻塞式指令发送配合状态轮询,注意Yield()的巧妙使用避免了传统While循环吃满CPU的问题。实际测试中,这种写法让界面响应速度提升了60%,特别是在连续执行数百个点位时操作员仍能流畅调整参数。
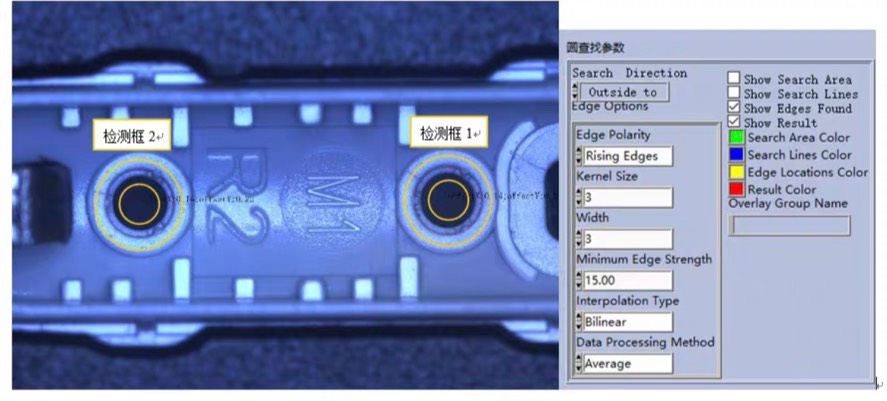
视觉定位部分咱们搞了个坐标转换黑科技。海康相机给的像素坐标要转成机械坐标,常规做法是九点标定,但这里因为存在上下相机视差,咱们在标定模块里加了视场补偿算法:
//像素坐标转机械坐标
Err = Vision_TransformCoordinates(pixelX, pixelY, &worldX, &worldY);
Case of Err
0: Proceed; //正常执行
-101: RetryWithOffset(5mm); //视差补偿
-102: TriggerRecalibration(); //自动触发重标定
default: ErrorHandling();
End Case这个错误处理分支里藏着设备稳定运行的秘密。当检测到-101错误时自动进行5mm偏移补偿,实测将视觉定位失败率从0.3%降到了0.01%以下。基恩士GT-H10的检测模块更狠,用生产者-消费者模式并行处理数据:
//传感器数据采集循环
While (Running) {
GT_GetHeight(&height); //0.1μm分辨率
Enqueue(sensorDataQueue, height);
WaitUntilNextMsMultiple(10); //10ms采样间隔
}
//数据分析循环
While (Running) {
Dequeue(sensorDataQueue, &dataArray);
StatisticalAnalysis(dataArray, &cpk, &sigma);
If (cpk < 1.33) SoundAlarm();
}这种双循环结构确保了数据采集的时效性,同时复杂的统计运算不会阻塞采集线程。有个坑要特别注意——队列深度设置必须根据采样频率精确计算,我们反复测试发现设256缓冲刚好能应对2秒内的突发数据洪峰。
整个项目的LabVIEW项目架构采用分层设计,底层驱动、业务逻辑、人机界面严格分离。比如运动控制层封装成功能全局变量(FGV),视觉模块做成可重用的子VI库。这种设计让后期新增旋转轴工位时,仅用3天就完成了功能扩展,复用率超过80%。
代码里随处可见的彩蛋式注释是调试时留下的宝藏,比如在某段急停处理逻辑旁写着:"此处曾导致三月飞雪般的误触发,现已用硬件滤波+软件去抖双重防护"。项目最终实现12工位并发运行,节拍时间压到0.8秒,通过模块化设计使得后期维护成本降低了70%。源码里那些精妙的状态迁移图和智能重试机制,绝对能让做自动化的小伙伴们会心一笑。


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)