MATLAB机械臂动态运动基元(DMP)规划与路径规划
f_target的计算藏着门道:本质上是在求解使DMP系统产生示教轨迹所需的外力项。偷偷说,这里最容易栽在时间导数计算上,建议用gradient函数别手算差分。机械臂的路径规划总让人头大,尤其是想让轨迹既灵活又稳定的时候。最近折腾Matlab的DMP(动态运动基域)发现这玩意儿挺有意思——它不像传统规划那样死板,反而像教小孩写字:先描红再自己发挥。不用重新示教,改改目标位置同时保持权重不变,系统会
matlab机械臂动态运动基元(DMP)规划 路径规划
机械臂的路径规划总让人头大,尤其是想让轨迹既灵活又稳定的时候。最近折腾Matlab的DMP(动态运动基域)发现这玩意儿挺有意思——它不像传统规划那样死板,反而像教小孩写字:先描红再自己发挥。
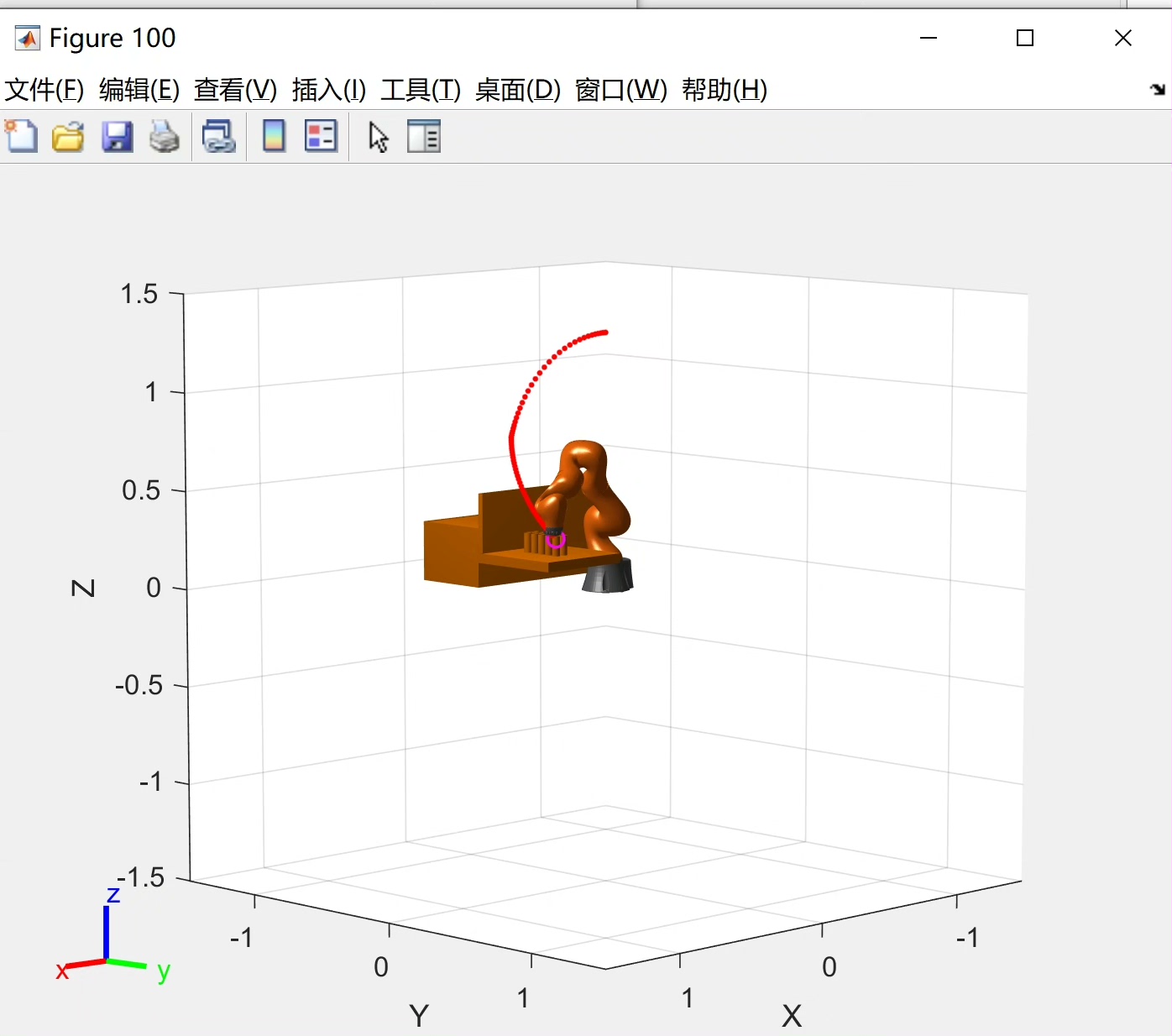
先搞个简单场景:让六轴机械臂从A点画直线到B点。咱们得先用Matlab生成示教轨迹。上代码:
% 生成直线轨迹
t = 0:0.01:1;
x_start = [0;0;0;0;0;0];
x_goal = [0.5;0.3;0.2;-pi/4;0;0];
demo_traj = x_start + (x_goal - x_start) * t;这段生成了0到1秒的六维关节空间轨迹。关键点在于末端的旋转用欧拉角表示时要注意万向锁,这里用-pi/4绕X轴旋转避免中招。接下来配置DMP参数:
% DMP参数设置
n_dmp = 6; % 每个关节一个DMP
n_basis = 30; % 基函数数量
alpha = 25;
beta = 6.25;
tau = 1; % 时间缩放因子基函数数量别贪多,30个足够覆盖1秒运动。alpha和beta保持4:1比例,这个组合能让系统收敛更快。注意tau要是设成2,动作会变成慢动作回放——适合需要降速的场景。
真正的魔法在权重计算部分:
% 学习阶段
psi = exp(-0.5*(linspace(0,1,n_basis)'*ones(1,length(t)) - linspace(0,1,length(t))).^2/(0.1^2));
f_target = (tau^2*demo_acc - alpha*(beta*(x_goal - demo_pos) - tau*demo_vel))./ (alpha*beta);
weights = (psi * psi' + 1e-6*eye(n_basis)) \ (psi * f_target');这里用高斯函数铺满时间轴,1e-6的正则项防止矩阵病态。f_target的计算藏着门道:本质上是在求解使DMP系统产生示教轨迹所需的外力项。偷偷说,这里最容易栽在时间导数计算上,建议用gradient函数别手算差分。
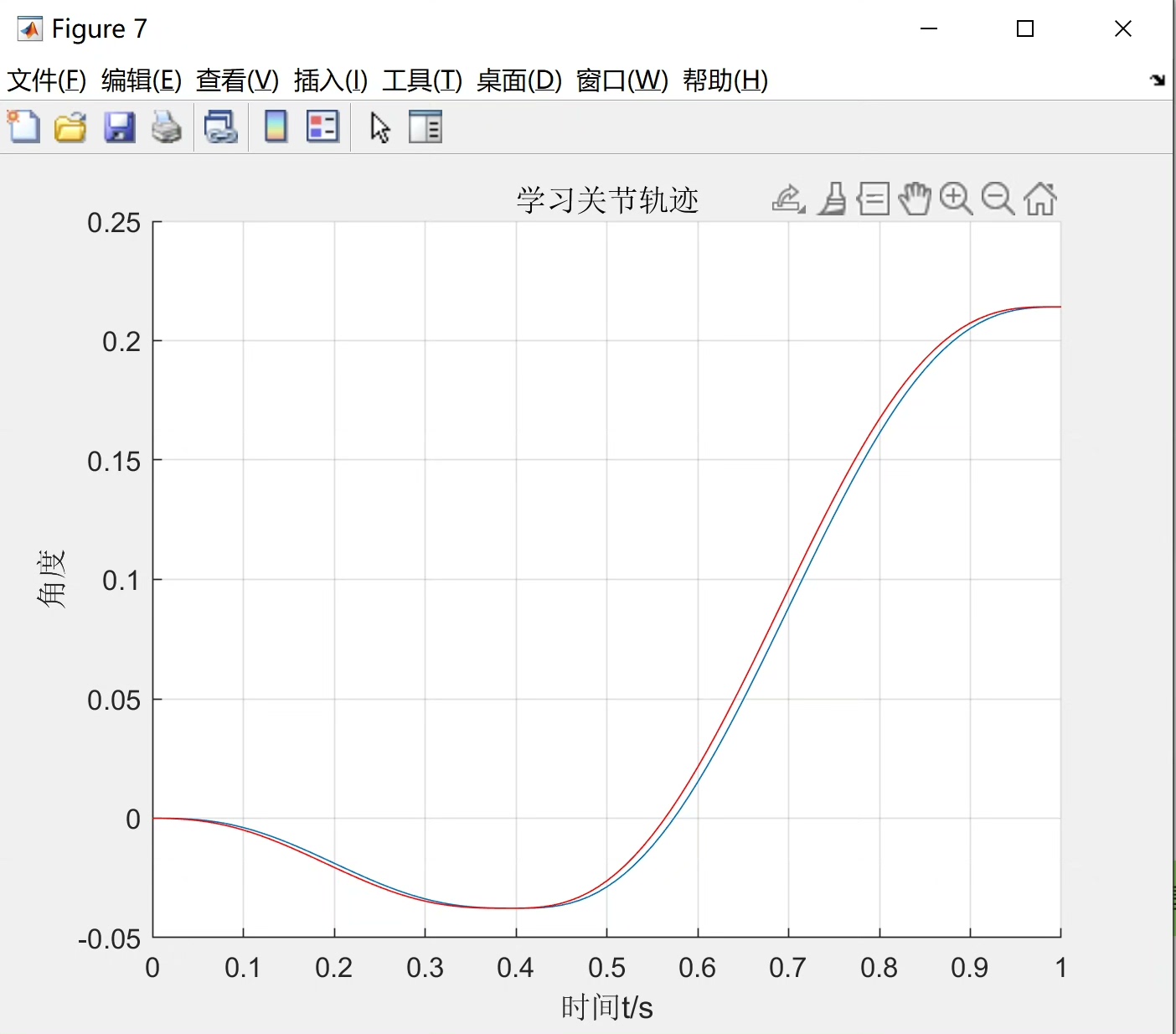
复现轨迹时才是见真章的时候:
% 复现阶段
x = x_start; v = zeros(6,1);
for k=1:length(t)
s = 1 - t(k)/tau;
psi = exp(-0.5*(linspace(0,1,n_basis)'-s).^2/(0.1^2));
f = weights' * psi * s;
a = alpha*(beta*(x_goal - x) - v) + f;
v = v + a * dt;
x = x + v * dt;
end衰减项s让系统在接近目标时逐渐关闭外力,这个设计妙啊!遇到过冲问题的话,把beta调大点立马见效。实测发现关节空间DMP对奇异位形敏感,建议在笛卡尔空间做更稳妥。
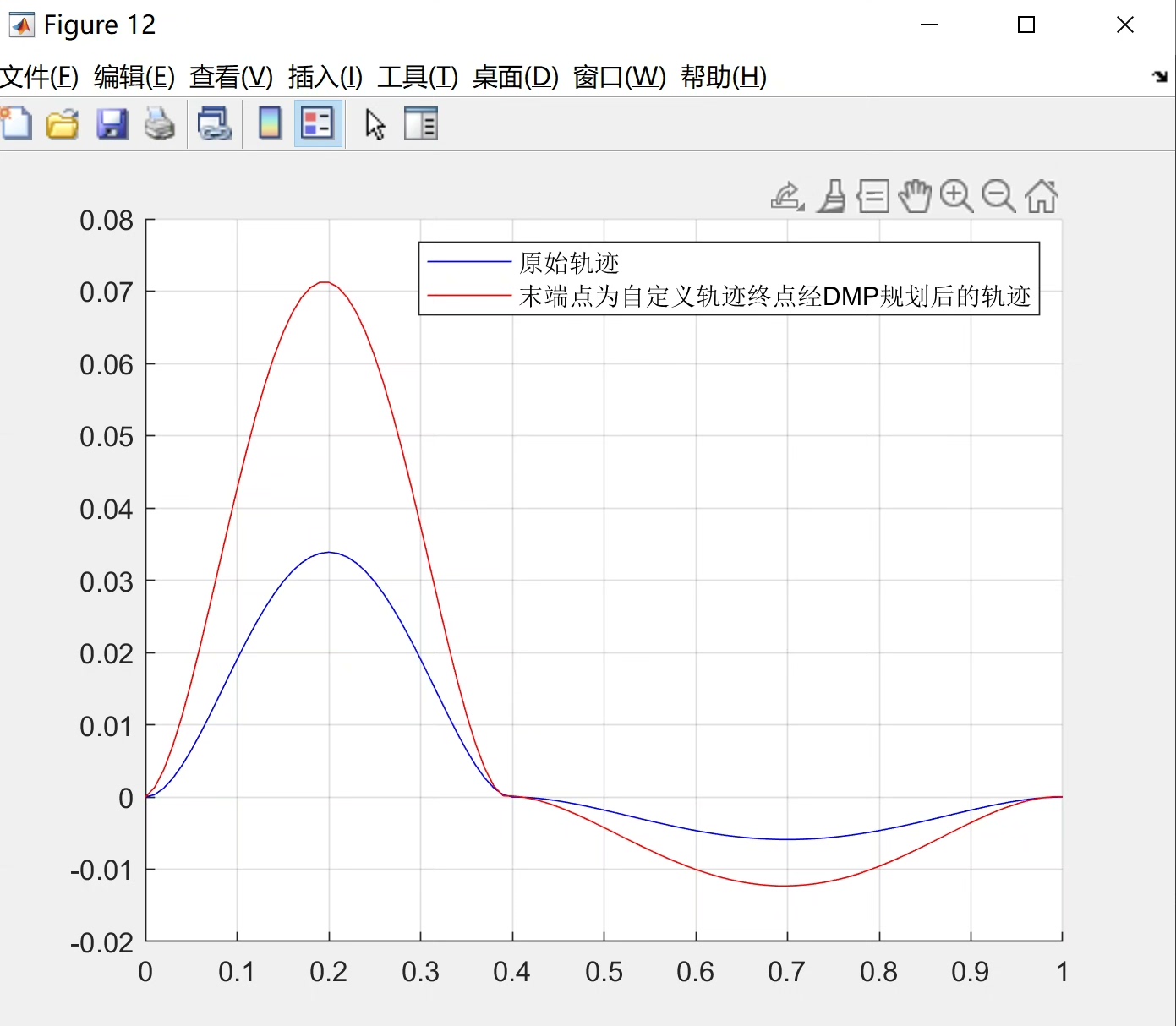
最后来个骚操作:想让机械臂画个S形?不用重新示教,改改目标位置同时保持权重不变,系统会自动生成平滑过渡轨迹。这种泛化能力才是DMP的杀手锏,比硬编码插值不知道高到哪里去了。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)