【学习笔记】三维重建中Alpha shapes与Ball Pivoting方法区别
概述
Alpha shapes和Ball Pivoting方法都是经典的重建方法,但是原理不同。Alpha shapes基于计算几何的Delaunay三角化,通过alpha值控制细节程度,适合凸形结构,但对噪声敏感。而Ball Pivoting是一种基于滚球原理的流形重建方法,更适合稠密点云,能处理曲面,但依赖点云密度和法向量。
具体区分
| 特性 | Alpha shapes | BPA |
|---|---|---|
| 核心原理 | 基于计算几何,对点集的Delaunay三角化进行“修剪” | 基于物理物理过程模拟,一个球在点云上“滚动” |
| 关键参数 | alpha值 ( α ) (\alpha) (α), | 球半径 ( ρ ) (\rho) (ρ),固定半径的球,控制可跨越点间距 |
| 对点云密度的要求 | 相对不敏感,较大的 ( α ) (\alpha) (α)值可跨越稀疏区域 | 高度敏感,球半径必须大于局部点间距 |
| 优点 | 概念简单,能重建任意拓扑(包括非流形),对开放边界和系数区域处理较好 | 在稠密均匀点云上快速高效,易生成水密网格 |
| 缺点 | 对 ( α ) (\alpha) (α)值敏感,难以选择;曲率大区域易产生锯齿,结果可能非流形 | 对点云密度非常敏感;稀疏或密度不均区域易重建失败,形成孔洞 |
它们都利用了 “空圆” 这一Delaunay三角化的基本性质。但使用这个性质的方式完全不同:
Alpha Shapes (全局雕刻):先生成完整的Delaunay三角网,然后根据一个全局统一的尺度 α,像用剪刀剪一样,移除不合格的三角形。它是一个 “自上而下”的筛选过程。
Ball Pivoting (局部生长):没有预先构建完整的三角网。它用一个固定半径的球作为“探针”,从局部开始,在点云表面滚动,增量地连接三个接触点来生成三角形。它是一个 “自下而上”的生长过程。
它们最根本的关联在于:当点云无限稠密且完全均匀时,对于某个特定的 α 值,Alpha Shapes 的理论结果会与使用相同半径的 Ball Pivoting 的结果非常相似。因为在这样的理想情况下,BPA的滚球路径恰好会勾勒出Alpha Shapes所定义的“空圆”边界。
探究:alpha shapes
-
理论基础:Delaunay三角剖分
这是Aplha shapes的基础。对于给定的点集 S S S,其Delaunay三角剖分满足“空圆特性”:即对于DT中的任何一个三角形,其外接圆内不包含 S S S中的任何其他点。 -
α \alpha α形状的定义
对于给定的点集 S S S和参数 a l p h a ( 0 ≤ α ≤ ∞ ) alpha (0 \leq \alpha \leq \infty) alpha(0≤α≤∞),点集的 α \alpha α形状由Delaunay三角剖分中满足一下条件的所有边(在3D中还包括面)构成:
存在一个半径为 α \alpha α 的空圆盘(不包含点集中的任何内点),使得该边(或面)位于圆盘的边界上。
这个定义的直观理解是:
在点集 S S S的“背景”上滚动一个半径为 α \alpha α的圆盘,当圆盘在点之间“卡住”时,这些点之间就形成了一条 α \alpha α-形状的边。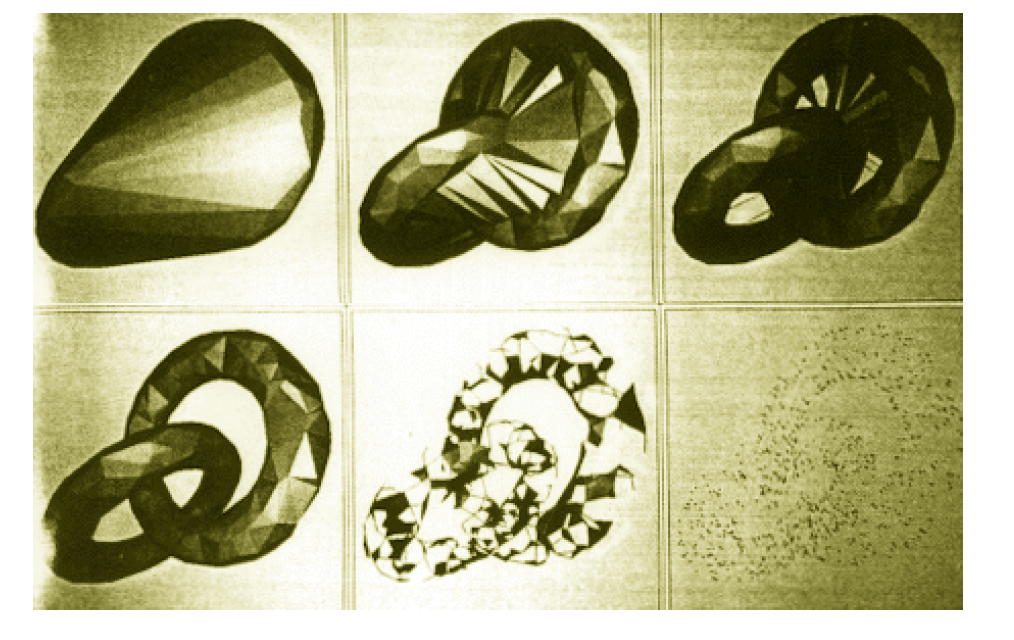
-
从定义到算法
从算法角度看, α \alpha α-形状是Delaunay三角剖分的子复型。
Alpha( α \alpha α)参数是一个“尺度”或“筛选器”。作用是,从唯一的、庞大的Delaunay三角网中,筛选出当前我们关心的特征尺度相关的部分。
Delaunay三角剖分算法:
图片引用自:链接:Delaunay三角剖分学习笔记
常用的为Bowyer_Watson算法。
探究 Ball Pivoting
一、核心思想
基本假设:想象一个半径为 ρ \rho ρ的“球”。如果这个球能同时接触三个点而不包含其他任何点,那么这三个点很可能来自同一个局部曲面,因此可以用一个三角形来连接它们。
关键定理:在采样密度足够高的理想条件下,BPA算法重建出的三角形网格式点集Delaunay三角化的一个子集,并且同胚于原始曲面。
滚球法核心思想为:滚球法的核心是模拟一个半径为ρ的球体在点云表面“滚动”的物理过程。算法从一组密集且分布均匀(不均匀无法确定合适的ρ)的点云出发,首先找到一个初始的“种子”三角形,使得该球能同时接触三个点且球内为空;然后以已生成网格的边界边为轴,让球沿其旋转滚动,寻找下一个接触点来形成新的三角形,通过这种局部生长的机制逐步扩展,最终重建出完整的曲面模型。该方法高度依赖于点云的密度和法线的一致性(此处法线用于告诉球应该沿着轴往哪个方向滚动),在理想条件下能高效生成水密的流形网格。图2表示二维滚球法获取边界。
小结
Alpha Shapes 过程概括为:首先为输入点云构建一个唯一且完整的 Delaunay 三角网作为基础[每个点集的Delaunay固定的],然后利用预设的 alpha 半径参数作为筛选尺度,遍历并剔除所有外接圆半径大于 alpha 的三角形,最终剩下的三角形集合即构成了能反映点云宏观形状的 alpha shape。
需要注意两个关键问题:其一,alpha 参数的选择至关重要且异常敏感,过小的值会导致形状支离破碎(如图1-第2行第2子图),过大的值则会过度平滑细节,使其退化为凸包(如图1-第1行第1子图),实践中往往需要通过多次试探才能确定合适值;其二,该方法对点云质量依赖度高,若点云密度不均或噪声较多,Delaunay 三角网中会产生大量畸形三角形,导致最终生成的 Alpha Shape 包含许多错误的连接和空洞,严重影响其保真度。
当点集无限稠密(现实中不可能实现,均是有限稠密)、分布完全均匀(现实中也不可能完全均匀)、且无噪声,同时滚球法的球半径 ρ 与 Alpha Shapes 的 alpha 半径 α 相等,并且滚球法采用了正确的法线方向时,滚球法可被视为 Alpha Shapes 的一种高效、增量式的实现。它无需构建全局 Delaunay 三角化,而是通过局部模拟物理过程,复现全局几何筛选的结果。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 21
21 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)