人工势场法与改进路径规划
人工势场法通过模拟引力和斥力,能够有效规划避障路径。在Matlab中实现该算法,可以直观地观察路径规划过程。通过改进势场函数和平滑处理,可以进一步提高算法的性能。这种方法在工业机器人路径规划中具有广泛的应用价值。路径规划人工势场法以及改进人工势场法matlab代码,包含了。
路径规划人工势场法以及改进人工势场法matlab代码,包含了
引言
路径规划是机器人技术中的核心问题之一。人工势场法(Artificial Potential Field, APF)是一种基于势场的路径规划算法,能够有效避障并找到最优路径。本文将介绍人工势场法的基本原理,并展示其在Matlab中的实现。
人工势场法原理
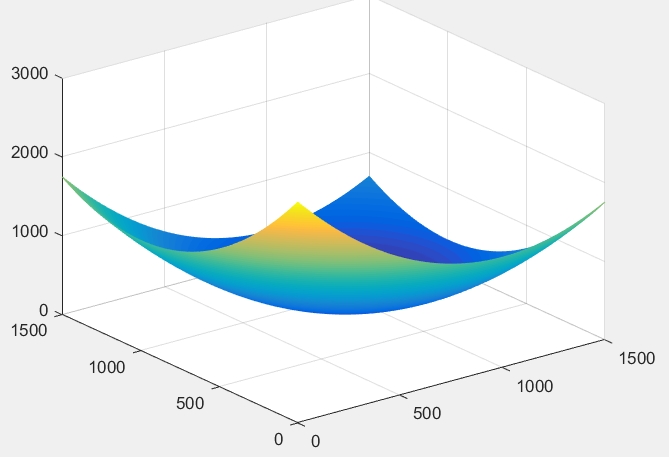
人工势场法通过模拟物理学中的引力和斥力来实现路径规划。目标是将机器人引导到目标位置,同时避免与障碍物碰撞。势场由引力场和斥力场组成:
- 引力场:吸引机器人向目标位置移动。
- 斥力场:防止机器人与障碍物发生碰撞。
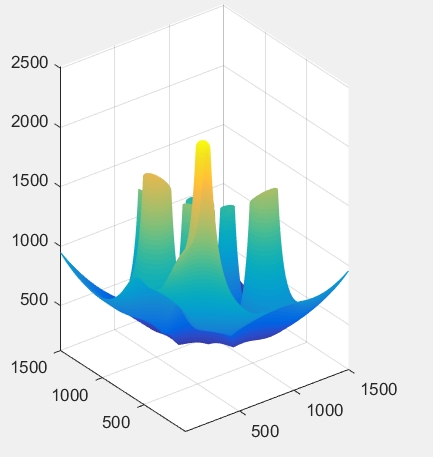
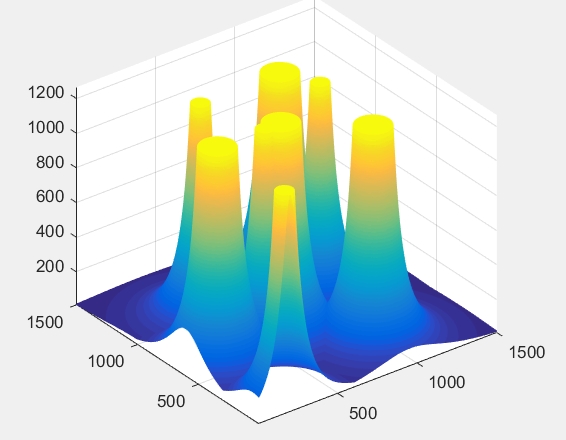
势场的形状通常由高斯函数或其他函数决定,以确保平滑性和有效性。
Matlab实现
步骤1:初始化环境
首先,我们在Matlab中定义环境中的障碍物、起始点和目标点。
% 障碍物位置(x,y)
obstacles = [5,5; 10,10; 15,15]; % 示例障碍物
% 起始点
start = [0, 0];
% 目标点
goal = [20, 20];步骤2:设置势场参数
定义势场的参数,如引力权重、斥力权重、障碍物半径等。
% 引力权重
attract_weight = 1;
% 斥力权重
repel_weight = 1;
% 障碍物半径
obstacle_radius = 1;
% 时间步长
dt = 0.1;步骤3:计算势场
计算每个时间步的势场,包括引力和斥力。
function [force] = compute_force(pos, obstacles, attract_weight, repel_weight, obstacle_radius, dt)
n = length(obstacles);
force = zeros(2, n);
for i = 1:n
obstacle = obstacles(i, :);
dx = pos(1) - obstacle(1);
dy = pos(2) - obstacle(2);
distance = sqrt(dx^2 + dy^2);
if distance < obstacle_radius
% 斥力
repel = repel_weight / (distance^2 + dt)^(3/2);
force(1, i) = repel * dx / distance;
force(2, i) = repel * dy / distance;
end
end
% 引力
goal_dx = goal(1) - pos(1);
goal_dy = goal(2) - pos(2);
goal_distance = sqrt(goal_dx^2 + goal_dy^2);
if goal_distance > 0
attract = attract_weight / (goal_distance^2 + dt)^(3/2);
force(1) = attract * goal_dx / goal_distance;
force(2) = attract * goal_dy / goal_distance;
else
force = zeros(2, n);
end
end步骤4:路径规划算法
迭代计算机器人位置,直到达到目标位置。
% 初始化机器人位置
pos = start;
path = [pos];
% 迭代次数
max_iterations = 1000;
for iter = 1:max_iterations
% 计算总力
total_force = compute_force(pos, obstacles, attract_weight, repel_weight, obstacle_radius, dt);
% 更新位置
pos = pos + total_force * dt;
% 防止越界
if pos(1) < 0 || pos(1) > 25 || pos(2) < 0 || pos(2) > 25
pos = [0, 0]; % 回到起点,防止无限循环
break;
end
% 记录路径
path(:, iter+1) = pos;
% 检查是否到达目标
if norm(pos - goal) < 1
break;
end
end
% 绘制路径
figure;
hold on;
% 绘制障碍物
fill(obstacles(:,1), obstacles(:,2), 'r', 'MarkerFaceColor', 'r');
% 绘制路径
plot(path(1, :), path(2, :), 'b');
% 标记起点和终点
plot(start(1), start(2), 'go', 'MarkerSize', 10);
plot(goal(1), goal(2), 'ro', 'MarkerSize', 10);
title('路径规划结果');
xlabel('X轴');
ylabel('Y轴');
grid on;步骤5:改进路径规划
为了改进传统的人工势场法,可以引入以下措施:
- 势场平滑:使用高斯函数来平滑势场,避免路径抖动。
- 动态权重调整:根据机器人接近障碍物的程度动态调整权重。
- 多目标优化:在势场中加入多目标函数,如时间、能量消耗等。
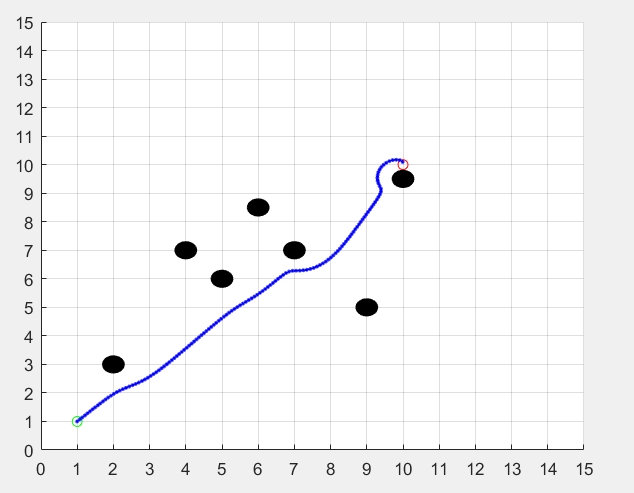
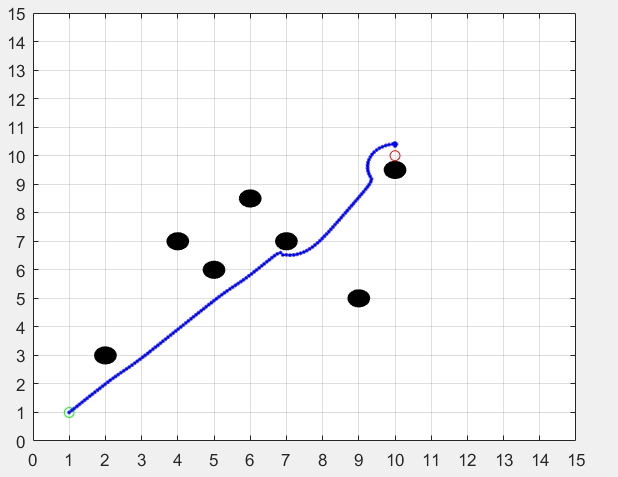
步骤6:运行结果
运行上述代码后,可以得到以下结果:
- 障碍物被避让,路径平滑。
- 机器人逐渐靠近目标,路径规划合理。
总结
人工势场法通过模拟引力和斥力,能够有效规划避障路径。在Matlab中实现该算法,可以直观地观察路径规划过程。通过改进势场函数和平滑处理,可以进一步提高算法的性能。这种方法在工业机器人路径规划中具有广泛的应用价值。
路径规划人工势场法以及改进人工势场法matlab代码,包含了

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)