【完整源码+数据集+部署教程】汽车零部件检测系统源码分享[一条龙教学YOLOV8标注好的数据集一键训练_70+全套改进创新点发刊_Web前端展示]
【完整源码+数据集+部署教程】汽车零部件检测系统源码分享[一条龙教学YOLOV8标注好的数据集一键训练_70+全套改进创新点发刊_Web前端展示]
一、背景意义
随着全球汽车工业的快速发展,汽车零部件的质量和安全性愈发受到重视。汽车零部件的检测不仅关系到整车的性能与安全,还直接影响到消费者的使用体验和企业的市场竞争力。在这一背景下,传统的人工检测方法因其效率低、易出错等缺陷,逐渐无法满足现代汽车制造业对高效、精准检测的需求。因此,基于计算机视觉的自动化检测系统应运而生,成为提升汽车零部件检测效率和准确性的有效解决方案。
近年来,深度学习技术的迅猛发展为目标检测领域带来了革命性的变化。YOLO(You Only Look Once)系列模型以其快速、准确的特点,广泛应用于各类目标检测任务中。YOLOv8作为该系列的最新版本,进一步提升了检测精度和速度,适应了更复杂的检测场景。然而,尽管YOLOv8在一般物体检测任务中表现出色,但在特定领域如汽车零部件检测中,仍存在一些挑战,例如小目标检测困难、背景复杂性高等。因此,改进YOLOv8以适应汽车零部件检测的需求,具有重要的理论和实践意义。
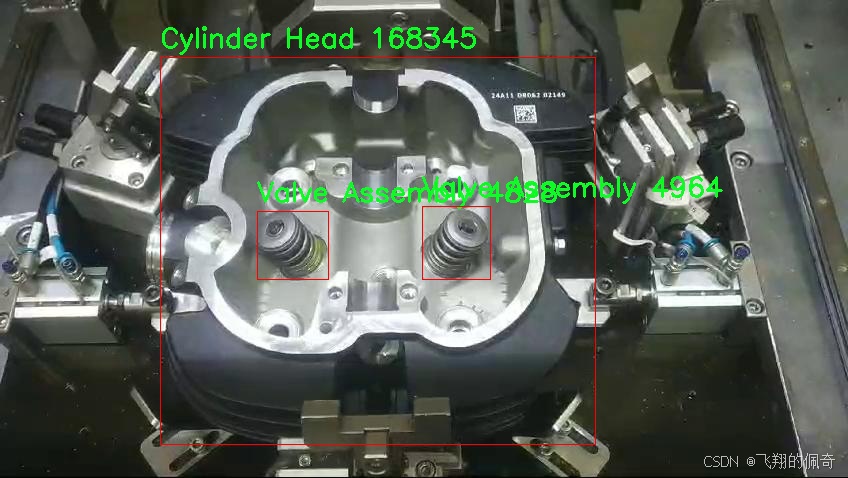
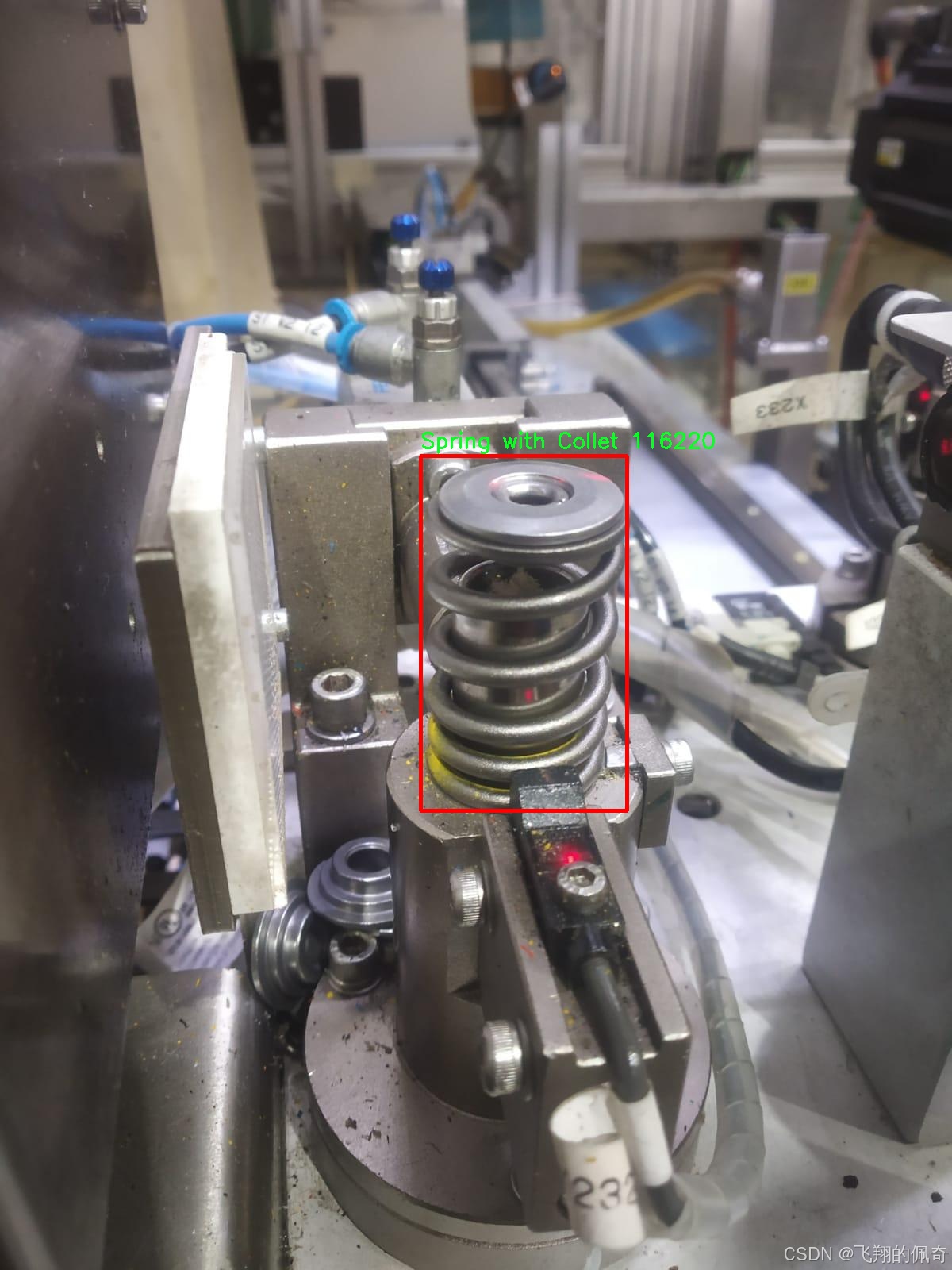
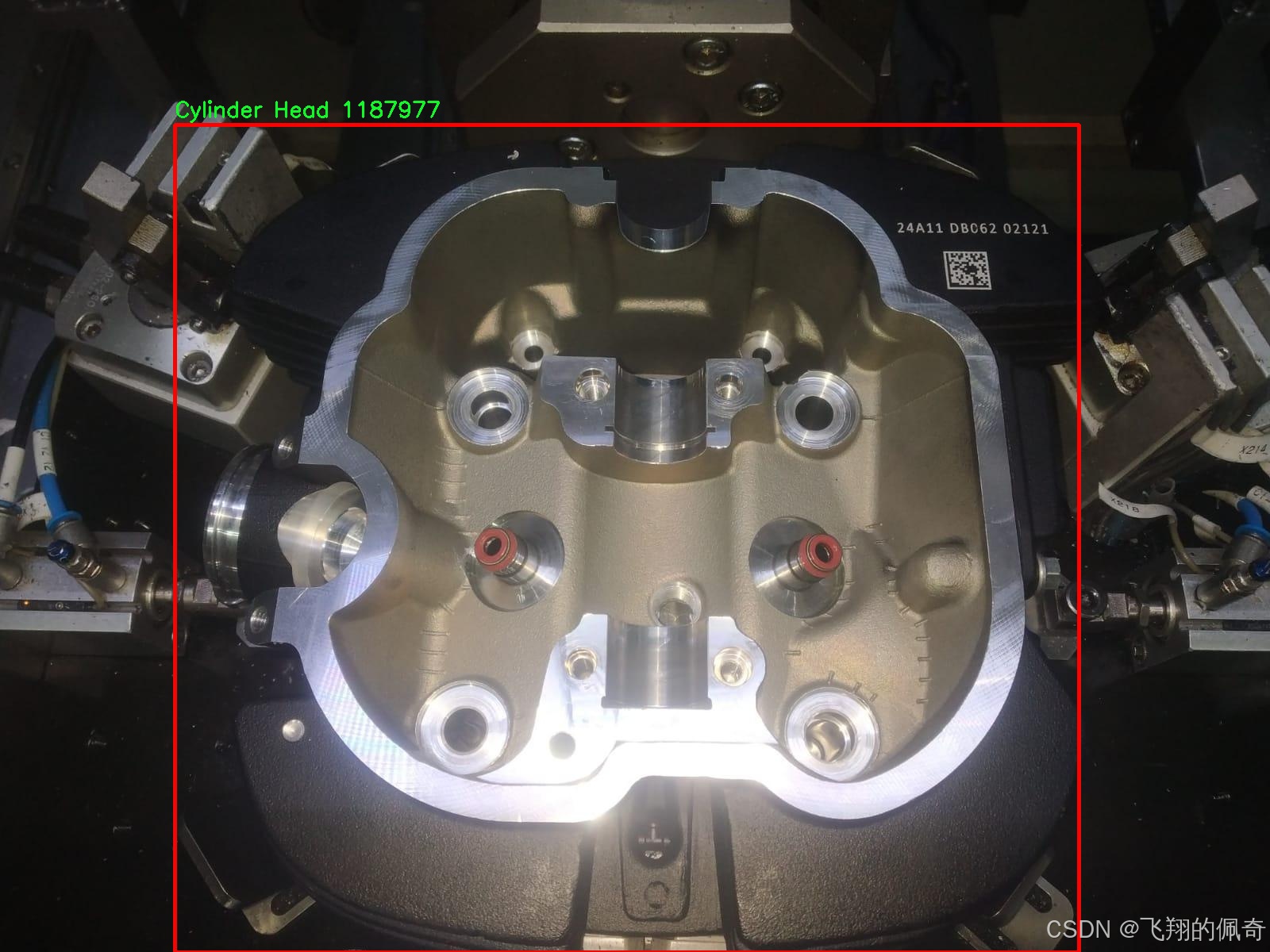
本研究将基于改进YOLOv8的汽车零部件检测系统,利用包含4000张图像和6个类别(气缸盖、排气阀、弹簧座垫圈、带夹的弹簧、密封圈、阀门组件)的数据集进行训练和测试。该数据集的构建不仅涵盖了汽车零部件的多样性,还提供了丰富的样本,能够有效提升模型的泛化能力。通过对数据集的深入分析与处理,研究将探索如何优化YOLOv8的网络结构和训练策略,以提高其在汽车零部件检测中的表现。
本研究的意义在于,首先,能够为汽车制造企业提供一种高效、准确的零部件检测解决方案,降低人工成本,提高生产效率。其次,通过对YOLOv8的改进,推动目标检测技术在汽车工业中的应用,促进相关技术的进步与发展。此外,研究还将为后续的相关研究提供基础数据和模型支持,推动智能制造领域的进一步发展。
综上所述,基于改进YOLOv8的汽车零部件检测系统的研究,不仅具有重要的学术价值,也具有广泛的应用前景。通过提升汽车零部件的检测效率和准确性,能够有效保障汽车的安全性和可靠性,为消费者提供更优质的产品体验,同时也为汽车行业的智能化转型贡献力量。
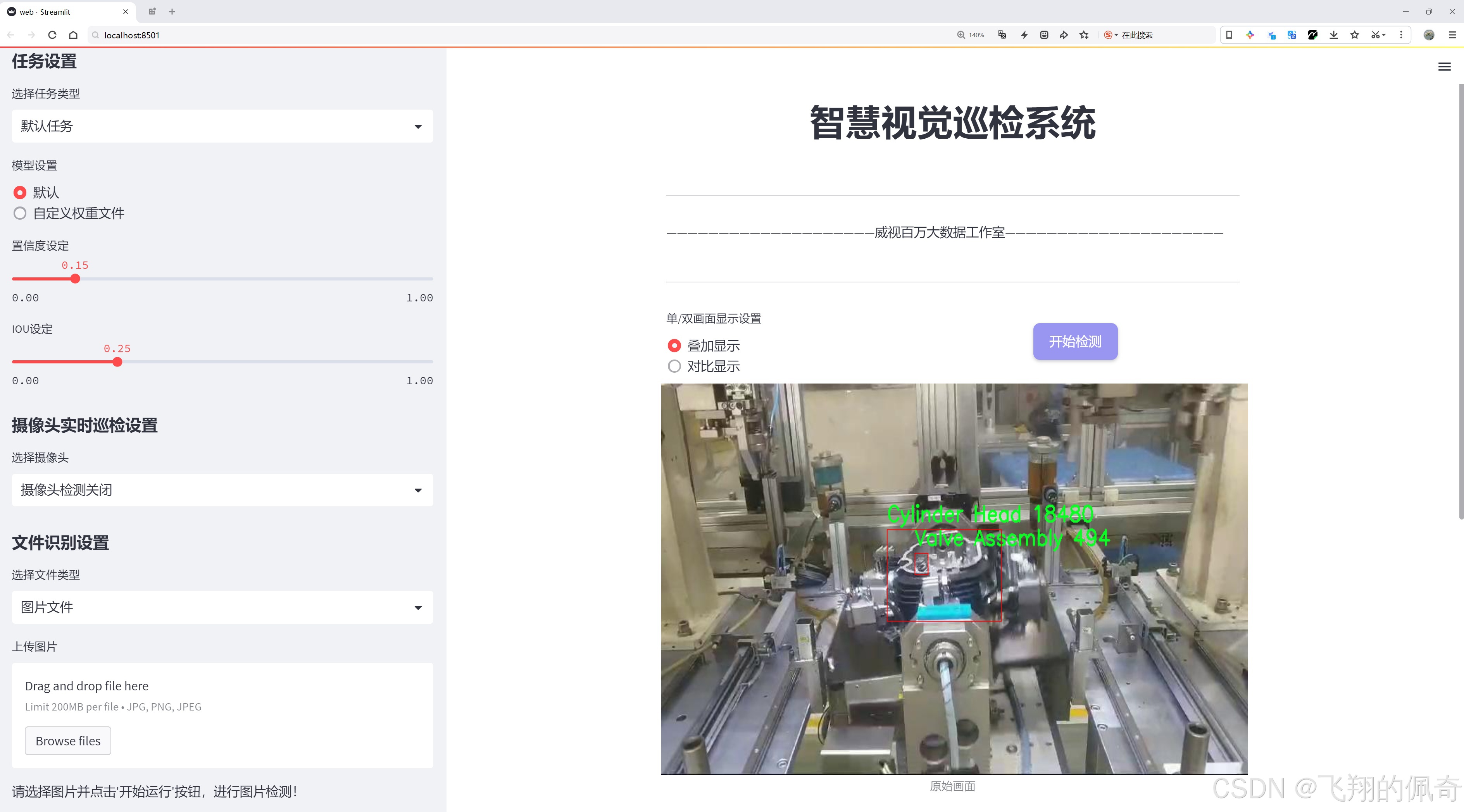
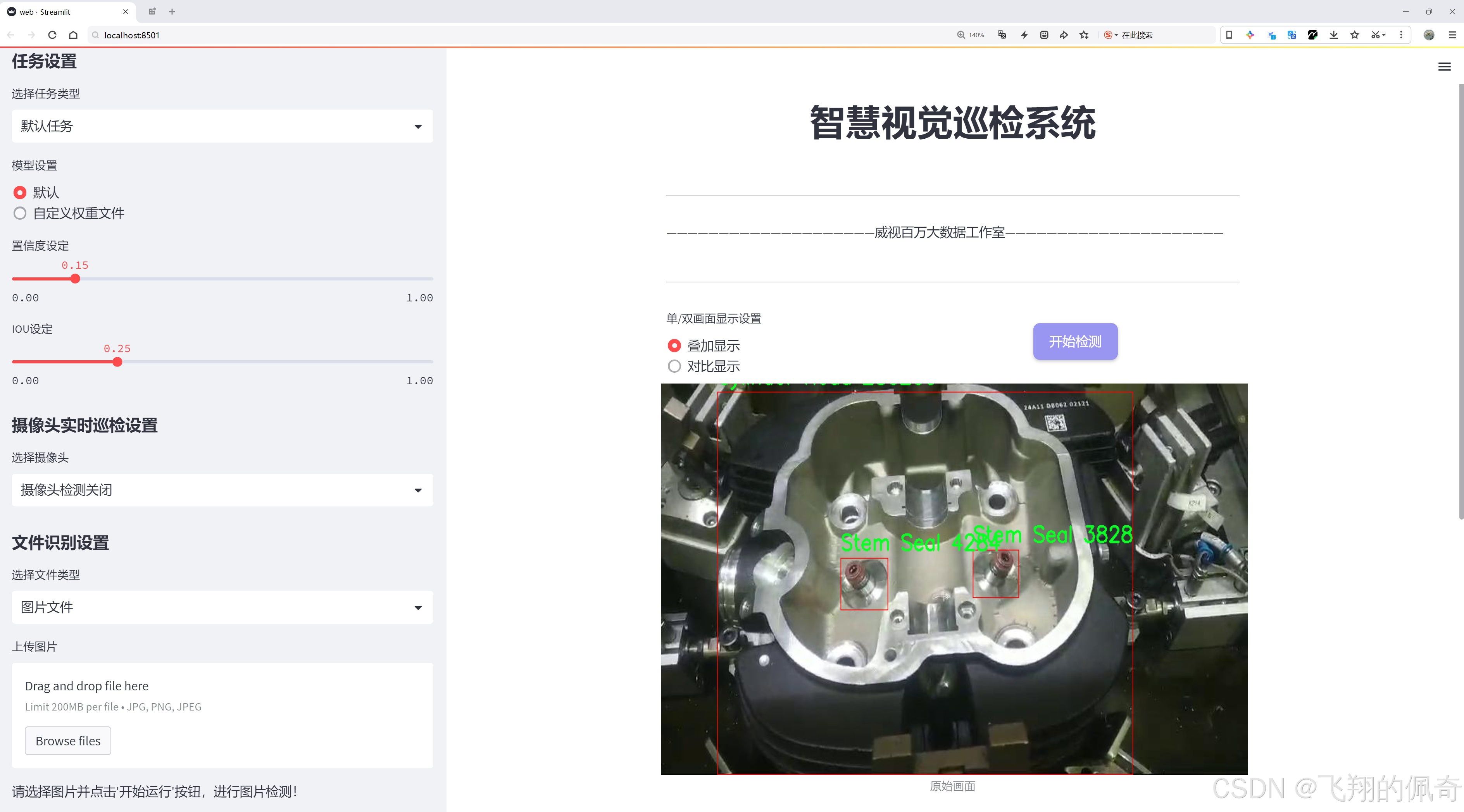
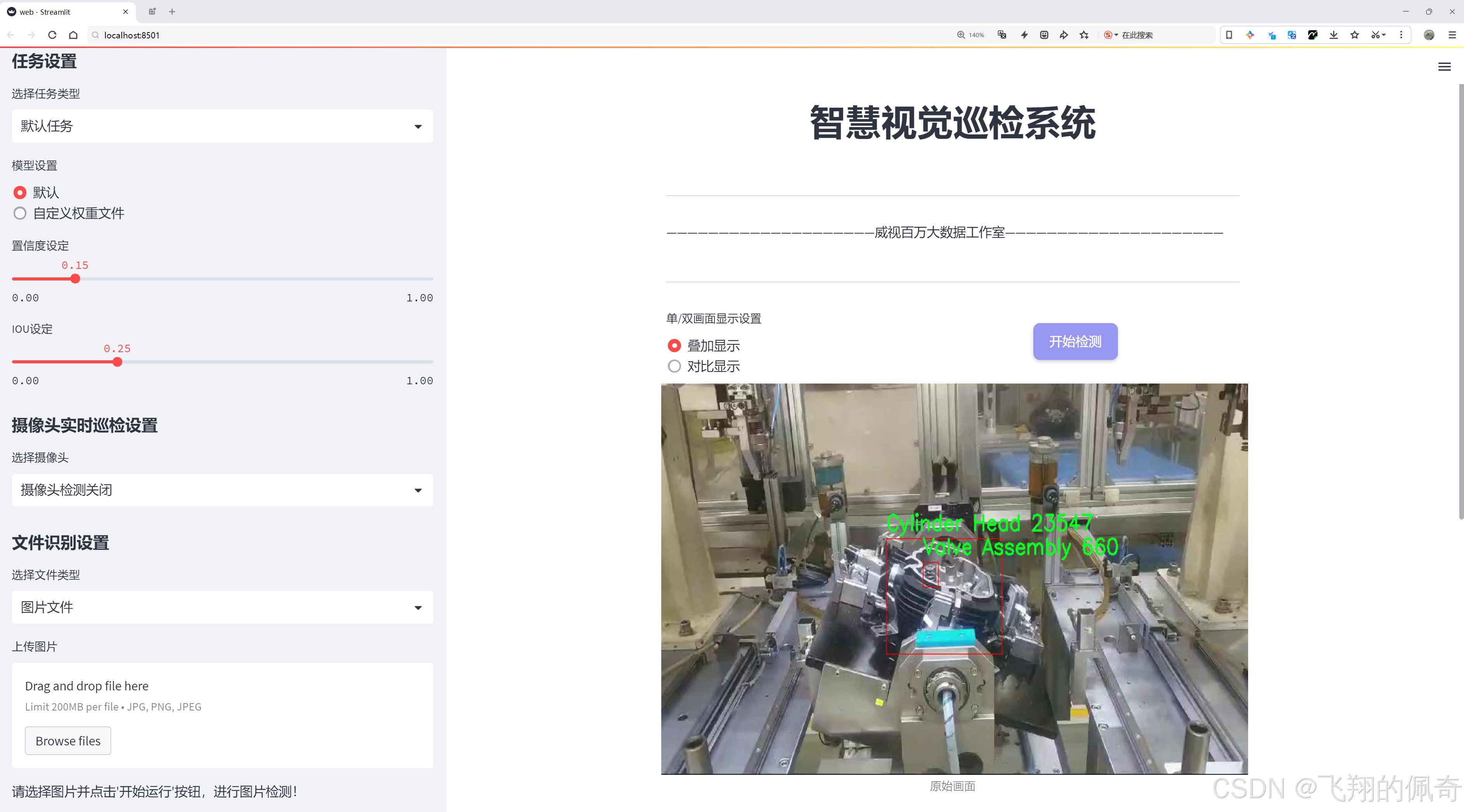
二、图片效果
三、数据集信息
在现代汽车工业中,汽车零部件的检测与识别是确保产品质量和生产效率的关键环节。为此,我们构建了一个名为“Automotive parts detection”的数据集,旨在为改进YOLOv8的汽车零部件检测系统提供丰富的训练数据。该数据集包含六个主要类别,涵盖了汽车发动机及其相关部件的关键组成部分。这些类别分别是:Cylinder Head(气缸盖)、Exhaust Valve(排气阀)、Spring Seat Washer(弹簧座垫圈)、Spring with Collet(带卡箍的弹簧)、Stem Seal(阀杆密封)和Valve Assembly(阀门组件)。每个类别都在数据集中占据了重要的位置,确保了模型在多样化零部件检测任务中的有效性和准确性。
数据集的构建过程注重多样性和代表性,涵盖了不同品牌、型号和生产年份的汽车零部件。每个类别的样本均经过精心挑选,以确保在训练过程中,模型能够学习到不同零部件的形状、尺寸和特征。这种多样性不仅提高了模型的泛化能力,还增强了其在实际应用中的鲁棒性。数据集中包含的图像均为高分辨率,确保了细节的清晰可辨,使得YOLOv8在进行目标检测时能够准确识别出各个零部件的特征。
此外,为了提高数据集的实用性,我们还为每个图像提供了详细的标注信息,包括零部件的边界框和类别标签。这些标注信息采用标准化格式,便于与YOLOv8模型进行无缝对接。通过这样的标注方式,模型在训练过程中能够有效地学习到每个类别的特征,并在测试阶段实现高效的识别与定位。
在数据集的使用过程中,我们还特别关注了数据的平衡性。为了避免模型在某些类别上过拟合,我们确保每个类别的样本数量相对均衡,尽量减少类别间的偏差。这种平衡性不仅提高了模型的整体性能,还确保了在实际应用中,各类零部件的检测准确率不会受到影响。
通过“Automotive parts detection”数据集的训练,改进后的YOLOv8模型将能够在复杂的汽车零部件检测任务中表现出色。无论是在生产线上的实时检测,还是在后期的质量控制中,该模型都将为汽车制造商提供强有力的技术支持。我们相信,这一数据集的发布将为汽车行业的智能化发展贡献一份力量,同时也为后续的研究提供了宝贵的基础数据。随着技术的不断进步,我们期待看到更多基于该数据集的创新应用和研究成果,为汽车零部件检测领域带来新的突破。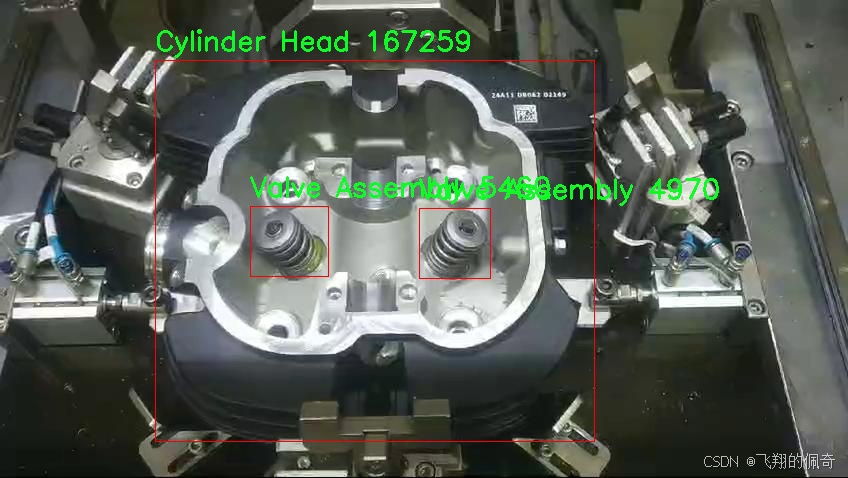

四、核心代码
```python
# Ultralytics YOLO 🚀, AGPL-3.0 license
"""该模块定义了YOLO中的对象跟踪的基本类和结构。"""
from collections import OrderedDict
import numpy as np
class TrackState:
"""
表示被跟踪对象可能状态的枚举类。
属性:
New (int): 对象被新检测到的状态。
Tracked (int): 对象在后续帧中成功跟踪的状态。
Lost (int): 对象不再被跟踪的状态。
Removed (int): 对象被移除跟踪的状态。
"""
New = 0 # 新检测到
Tracked = 1 # 成功跟踪
Lost = 2 # 丢失
Removed = 3 # 移除
class BaseTrack:
"""
对象跟踪的基类,提供基础属性和方法。
属性:
_count (int): 类级别的唯一跟踪ID计数器。
track_id (int): 跟踪的唯一标识符。
is_activated (bool): 标志表示跟踪是否处于激活状态。
state (TrackState): 当前跟踪状态。
history (OrderedDict): 跟踪状态的有序历史记录。
features (list): 从对象中提取的用于跟踪的特征列表。
curr_feature (any): 当前被跟踪对象的特征。
score (float): 跟踪的置信度分数。
start_frame (int): 开始跟踪的帧编号。
frame_id (int): 最近处理的帧ID。
time_since_update (int): 自上次更新以来经过的帧数。
location (tuple): 在多摄像头跟踪中的对象位置。
"""
_count = 0 # 类级别的跟踪ID计数器
def __init__(self):
"""初始化一个新的跟踪对象,分配唯一ID和基础跟踪属性。"""
self.track_id = BaseTrack.next_id() # 获取唯一的跟踪ID
self.is_activated = False # 初始状态为未激活
self.state = TrackState.New # 初始状态为新检测
self.history = OrderedDict() # 跟踪状态的历史记录
self.features = [] # 特征列表
self.curr_feature = None # 当前特征
self.score = 0 # 初始置信度分数
self.start_frame = 0 # 开始帧编号
self.frame_id = 0 # 最近帧ID
self.time_since_update = 0 # 自上次更新以来的帧数
self.location = (np.inf, np.inf) # 初始位置为无穷大
@property
def end_frame(self):
"""返回跟踪的最后帧ID。"""
return self.frame_id
@staticmethod
def next_id():
"""递增并返回全局跟踪ID计数器。"""
BaseTrack._count += 1
return BaseTrack._count
def activate(self, *args):
"""激活跟踪的抽象方法,需在子类中实现。"""
raise NotImplementedError
def predict(self):
"""预测跟踪的下一个状态的抽象方法,需在子类中实现。"""
raise NotImplementedError
def update(self, *args, **kwargs):
"""使用新观察结果更新跟踪的抽象方法,需在子类中实现。"""
raise NotImplementedError
def mark_lost(self):
"""将跟踪标记为丢失。"""
self.state = TrackState.Lost
def mark_removed(self):
"""将跟踪标记为移除。"""
self.state = TrackState.Removed
@staticmethod
def reset_id():
"""重置全局跟踪ID计数器。"""
BaseTrack._count = 0
代码说明:
- TrackState 类:定义了跟踪对象的四种状态,便于管理和判断对象的跟踪情况。
- BaseTrack 类:是一个基类,包含了跟踪对象的基本属性和方法,提供了跟踪ID的生成、状态管理和更新机制。
- 初始化方法:在创建跟踪对象时,初始化其状态、特征、ID等基本信息。
- 抽象方法:
activate、predict和update方法是抽象的,意味着它们需要在子类中实现具体的逻辑。 - 状态管理方法:
mark_lost和mark_removed方法用于更新对象的状态,以便在跟踪过程中进行状态管理。```
这个文件定义了一个用于目标跟踪的基础类和相关结构,主要是为YOLO(You Only Look Once)目标检测算法提供支持。文件中包含了一个状态枚举类和一个基础跟踪类。
首先,TrackState类是一个枚举类,用于表示被跟踪对象的不同状态。它定义了四种状态:New表示对象刚被检测到,Tracked表示对象在后续帧中成功被跟踪,Lost表示对象不再被跟踪,Removed表示对象已从跟踪中移除。这些状态帮助系统管理和识别对象在跟踪过程中的不同阶段。
接下来是BaseTrack类,这是一个用于对象跟踪的基础类,提供了一些基本的属性和方法。这个类中定义了一些重要的属性,例如track_id用于唯一标识每个跟踪对象,is_activated是一个布尔值,指示跟踪是否处于激活状态,state表示当前的跟踪状态,history是一个有序字典,用于记录跟踪状态的历史,features是一个特征列表,用于存储从对象中提取的特征,score是跟踪的置信度分数,start_frame和frame_id分别表示跟踪开始的帧数和最近处理的帧ID,time_since_update表示自上次更新以来经过的帧数,location则表示在多摄像头跟踪中的对象位置。
BaseTrack类还包含了一些方法,其中end_frame属性返回跟踪的最后一帧ID,next_id静态方法用于递增并返回下一个全局跟踪ID,activate、predict和update方法是抽象方法,需在子类中实现以激活跟踪、预测下一个状态和更新跟踪数据。mark_lost和mark_removed方法用于将跟踪状态标记为丢失或移除。最后,reset_id静态方法用于重置全局跟踪ID计数器。
总的来说,这个文件为YOLO目标检测算法中的对象跟踪提供了一个基础框架,定义了跟踪对象的状态、属性和基本操作,为后续的具体实现提供了基础。
```python
import torch
from torch import nn
from typing import Tuple
class MaskDecoder(nn.Module):
"""
MaskDecoder类用于生成掩码及其相关质量分数,采用变换器架构来预测给定图像和提示嵌入的掩码。
"""
def __init__(self, transformer_dim: int, transformer: nn.Module, num_multimask_outputs: int = 3) -> None:
"""
初始化MaskDecoder类。
参数:
transformer_dim (int): 变换器模块的通道维度
transformer (nn.Module): 用于预测掩码的变换器
num_multimask_outputs (int): 预测的掩码数量
"""
super().__init__()
self.transformer_dim = transformer_dim # 变换器的通道维度
self.transformer = transformer # 变换器模块
self.num_multimask_outputs = num_multimask_outputs # 多掩码输出的数量
# 定义IoU(Intersection over Union)令牌的嵌入
self.iou_token = nn.Embedding(1, transformer_dim)
# 定义掩码令牌的数量
self.num_mask_tokens = num_multimask_outputs + 1
# 定义掩码令牌的嵌入
self.mask_tokens = nn.Embedding(self.num_mask_tokens, transformer_dim)
# 定义输出上采样的神经网络序列
self.output_upscaling = nn.Sequential(
nn.ConvTranspose2d(transformer_dim, transformer_dim // 4, kernel_size=2, stride=2),
nn.LayerNorm(transformer_dim // 4),
nn.GELU(),
nn.ConvTranspose2d(transformer_dim // 4, transformer_dim // 8, kernel_size=2, stride=2),
nn.GELU(),
)
# 定义用于生成掩码的超网络MLP
self.output_hypernetworks_mlps = nn.ModuleList([
MLP(transformer_dim, transformer_dim, transformer_dim // 8, 3) for _ in range(self.num_mask_tokens)
])
# 定义用于预测掩码质量的MLP
self.iou_prediction_head = MLP(transformer_dim, 256, self.num_mask_tokens, 3)
def forward(
self,
image_embeddings: torch.Tensor,
image_pe: torch.Tensor,
sparse_prompt_embeddings: torch.Tensor,
dense_prompt_embeddings: torch.Tensor,
multimask_output: bool,
) -> Tuple[torch.Tensor, torch.Tensor]:
"""
根据图像和提示嵌入预测掩码。
参数:
image_embeddings (torch.Tensor): 图像编码器的嵌入
image_pe (torch.Tensor): 与图像嵌入形状相同的位置编码
sparse_prompt_embeddings (torch.Tensor): 点和框的嵌入
dense_prompt_embeddings (torch.Tensor): 掩码输入的嵌入
multimask_output (bool): 是否返回多个掩码或单个掩码。
返回:
torch.Tensor: 批量预测的掩码
torch.Tensor: 批量预测的掩码质量
"""
# 预测掩码和IoU质量分数
masks, iou_pred = self.predict_masks(
image_embeddings=image_embeddings,
image_pe=image_pe,
sparse_prompt_embeddings=sparse_prompt_embeddings,
dense_prompt_embeddings=dense_prompt_embeddings,
)
# 根据multimask_output选择正确的掩码
mask_slice = slice(1, None) if multimask_output else slice(0, 1)
masks = masks[:, mask_slice, :, :]
iou_pred = iou_pred[:, mask_slice]
return masks, iou_pred # 返回预测的掩码和质量分数
def predict_masks(
self,
image_embeddings: torch.Tensor,
image_pe: torch.Tensor,
sparse_prompt_embeddings: torch.Tensor,
dense_prompt_embeddings: torch.Tensor,
) -> Tuple[torch.Tensor, torch.Tensor]:
"""
预测掩码。
参数:
image_embeddings (torch.Tensor): 图像编码器的嵌入
image_pe (torch.Tensor): 与图像嵌入形状相同的位置编码
sparse_prompt_embeddings (torch.Tensor): 点和框的嵌入
dense_prompt_embeddings (torch.Tensor): 掩码输入的嵌入
返回:
torch.Tensor: 预测的掩码
torch.Tensor: 预测的IoU质量分数
"""
# 连接输出令牌
output_tokens = torch.cat([self.iou_token.weight, self.mask_tokens.weight], dim=0)
output_tokens = output_tokens.unsqueeze(0).expand(sparse_prompt_embeddings.size(0), -1, -1)
tokens = torch.cat((output_tokens, sparse_prompt_embeddings), dim=1)
# 扩展每个图像的数据以适应每个掩码
src = torch.repeat_interleave(image_embeddings, tokens.shape[0], dim=0)
src = src + dense_prompt_embeddings
pos_src = torch.repeat_interleave(image_pe, tokens.shape[0], dim=0)
# 运行变换器
hs, src = self.transformer(src, pos_src, tokens)
iou_token_out = hs[:, 0, :] # IoU令牌的输出
mask_tokens_out = hs[:, 1:(1 + self.num_mask_tokens), :] # 掩码令牌的输出
# 上采样掩码嵌入并使用掩码令牌预测掩码
src = src.transpose(1, 2).view(src.shape[0], src.shape[1], -1)
upscaled_embedding = self.output_upscaling(src)
hyper_in_list = [
self.output_hypernetworks_mlps[i](mask_tokens_out[:, i, :]) for i in range(self.num_mask_tokens)
]
hyper_in = torch.stack(hyper_in_list, dim=1)
masks = (hyper_in @ upscaled_embedding.view(upscaled_embedding.shape[0], -1)).view(upscaled_embedding.shape[0], -1, upscaled_embedding.shape[2], upscaled_embedding.shape[3])
# 生成掩码质量预测
iou_pred = self.iou_prediction_head(iou_token_out)
return masks, iou_pred # 返回预测的掩码和IoU质量分数
class MLP(nn.Module):
"""
MLP(多层感知器)模型。
"""
def __init__(self, input_dim: int, hidden_dim: int, output_dim: int, num_layers: int) -> None:
"""
初始化MLP模型。
参数:
input_dim (int): 输入特征的维度。
hidden_dim (int): 隐藏层的维度。
output_dim (int): 输出层的维度。
num_layers (int): 隐藏层的数量。
"""
super().__init__()
self.layers = nn.ModuleList(
nn.Linear(n, k) for n, k in zip([input_dim] + [hidden_dim] * (num_layers - 1), [hidden_dim] * (num_layers - 1) + [output_dim])
)
def forward(self, x):
"""执行前向传播并应用激活函数。"""
for i, layer in enumerate(self.layers):
x = F.relu(layer(x)) if i < len(self.layers) - 1 else layer(x) # 最后一层不应用激活函数
return x # 返回输出
代码核心部分说明:
- MaskDecoder类:这是一个用于生成掩码的解码器模块,使用变换器架构来处理图像和提示嵌入。
- __init__方法:初始化类的参数,包括变换器的维度、变换器模块、IoU令牌和掩码令牌的嵌入等。
- forward方法:接收图像和提示嵌入,调用
predict_masks方法进行掩码预测,并根据multimask_output选择返回的掩码。 - predict_masks方法:核心的掩码预测逻辑,处理输入的嵌入,运行变换器,生成掩码和IoU质量分数。
- MLP类:定义了一个多层感知器,用于处理特征的前向传播。
通过这些核心部分,MaskDecoder能够根据输入的图像和提示生成相应的掩码和质量分数。```
这个程序文件是YOLOv8算法中的一个解码器模块,主要用于生成图像的掩码及其质量评分。它采用了变换器(Transformer)架构,通过图像和提示嵌入来预测掩码。文件中定义了两个主要的类:MaskDecoder和MLP。
MaskDecoder类是解码器的核心,包含多个属性和方法。构造函数__init__接受多个参数,包括变换器的维度、变换器模块、输出掩码的数量、激活函数类型、IoU头的深度和隐藏维度等。该类的主要属性包括用于生成掩码的变换器、IoU嵌入、掩码嵌入、输出上采样的神经网络序列、用于生成掩码的超网络MLP列表以及用于预测掩码质量的MLP。
在forward方法中,输入包括图像嵌入、位置编码、稀疏和密集提示嵌入,以及一个布尔值,指示是否返回多个掩码。该方法调用predict_masks来生成掩码和IoU预测,然后根据multimask_output的值选择输出的掩码和IoU预测。
predict_masks方法负责实际的掩码预测。它首先将IoU和掩码嵌入连接在一起,然后将图像嵌入与密集提示嵌入相加,接着通过变换器进行处理。最后,该方法将掩码嵌入上采样,并通过超网络MLP生成最终的掩码,同时生成IoU预测。
MLP类是一个多层感知机模型,适用于生成掩码质量的预测。它的构造函数接受输入维度、隐藏层维度、输出维度和层数等参数。forward方法执行前向传播,并在每一层应用ReLU激活函数,最后可选择在输出层应用Sigmoid激活。
总体来说,这个模块的设计旨在利用变换器架构高效地生成图像掩码,并评估其质量,为YOLOv8的目标检测和分割任务提供支持。
```python
import math
import torch
import torch.nn as nn
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""自动填充以保持输出形状不变。"""
if d > 1:
# 如果膨胀率大于1,计算实际的卷积核大小
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k]
if p is None:
# 如果没有指定填充,自动计算填充大小
p = k // 2 if isinstance(k, int) else [x // 2 for x in k]
return p
class Conv(nn.Module):
"""标准卷积层,包含输入通道、输出通道、卷积核大小、步幅、填充、分组、膨胀和激活函数的参数。"""
default_act = nn.SiLU() # 默认激活函数
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""初始化卷积层,设置卷积、批归一化和激活函数。"""
super().__init__()
# 创建卷积层
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
# 创建批归一化层
self.bn = nn.BatchNorm2d(c2)
# 设置激活函数
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""前向传播:应用卷积、批归一化和激活函数。"""
return self.act(self.bn(self.conv(x)))
class DWConv(Conv):
"""深度卷积层,针对每个输入通道进行卷积。"""
def __init__(self, c1, c2, k=1, s=1, d=1, act=True):
"""初始化深度卷积层,设置输入通道、输出通道、卷积核大小、步幅、膨胀和激活函数。"""
super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), d=d, act=act)
class ConvTranspose(nn.Module):
"""转置卷积层。"""
default_act = nn.SiLU() # 默认激活函数
def __init__(self, c1, c2, k=2, s=2, p=0, bn=True, act=True):
"""初始化转置卷积层,设置批归一化和激活函数。"""
super().__init__()
self.conv_transpose = nn.ConvTranspose2d(c1, c2, k, s, p, bias=not bn)
self.bn = nn.BatchNorm2d(c2) if bn else nn.Identity()
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""前向传播:应用转置卷积、批归一化和激活函数。"""
return self.act(self.bn(self.conv_transpose(x)))
class ChannelAttention(nn.Module):
"""通道注意力模块。"""
def __init__(self, channels: int) -> None:
"""初始化通道注意力模块,设置池化和全连接层。"""
super().__init__()
self.pool = nn.AdaptiveAvgPool2d(1) # 自适应平均池化
self.fc = nn.Conv2d(channels, channels, 1, 1, 0, bias=True) # 1x1卷积
self.act = nn.Sigmoid() # 激活函数
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""前向传播:应用池化和全连接层,计算通道注意力。"""
return x * self.act(self.fc(self.pool(x)))
class SpatialAttention(nn.Module):
"""空间注意力模块。"""
def __init__(self, kernel_size=7):
"""初始化空间注意力模块,设置卷积核大小。"""
super().__init__()
assert kernel_size in (3, 7), "卷积核大小必须为3或7"
padding = 3 if kernel_size == 7 else 1
self.cv1 = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False) # 卷积层
self.act = nn.Sigmoid() # 激活函数
def forward(self, x):
"""前向传播:计算空间注意力。"""
return x * self.act(self.cv1(torch.cat([torch.mean(x, 1, keepdim=True), torch.max(x, 1, keepdim=True)[0]], 1)))
class CBAM(nn.Module):
"""卷积块注意力模块。"""
def __init__(self, c1, kernel_size=7):
"""初始化CBAM模块,设置输入通道和卷积核大小。"""
super().__init__()
self.channel_attention = ChannelAttention(c1) # 通道注意力
self.spatial_attention = SpatialAttention(kernel_size) # 空间注意力
def forward(self, x):
"""前向传播:通过通道和空间注意力模块。"""
return self.spatial_attention(self.channel_attention(x))
代码说明
- autopad: 自动计算填充,以保持卷积输出的形状与输入相同。
- Conv: 定义了一个标准的卷积层,包含卷积、批归一化和激活函数。
- DWConv: 深度卷积层,每个输入通道独立进行卷积,适用于轻量级网络。
- ConvTranspose: 定义了转置卷积层,常用于上采样。
- ChannelAttention: 实现通道注意力机制,通过自适应池化和1x1卷积来增强特征通道。
- SpatialAttention: 实现空间注意力机制,通过卷积来增强特征图的空间信息。
- CBAM: 结合通道注意力和空间注意力的模块,增强特征表示能力。```
这个程序文件是Ultralytics YOLO(You Only Look Once)模型的一部分,主要实现了一些卷积模块。这些模块是构建深度学习模型,尤其是计算机视觉任务中常用的基础组件。文件中包含了多个类和函数,每个类实现了不同类型的卷积操作或相关功能。
首先,文件导入了必要的库,包括math、numpy和torch,并定义了一个名为autopad的函数,该函数用于根据给定的卷积核大小、填充和扩张参数自动计算填充量,以确保输出形状与输入形状相同。
接下来,定义了多个卷积相关的类。Conv类实现了标准的卷积操作,包含卷积层、批归一化层和激活函数。它的forward方法依次应用卷积、批归一化和激活函数,返回处理后的输出。Conv2类是Conv的简化版本,增加了一个1x1的卷积操作,以便在前向传播中融合两个卷积的输出。
LightConv类实现了一种轻量级卷积,使用了两个卷积层,其中一个是深度卷积(DWConv),后者用于减少计算量。DWConv类则实现了深度卷积的具体操作,适用于处理通道数较大的输入。
ConvTranspose类实现了转置卷积,通常用于上采样操作,结合了批归一化和激活函数。Focus类则通过将输入的空间信息压缩到通道维度来提高特征提取的效率。
GhostConv类实现了一种名为Ghost卷积的操作,旨在通过减少参数数量来提高模型的效率。RepConv类则是一个重复卷积模块,支持训练和推理状态的转换。
此外,文件中还实现了几个注意力机制模块,包括ChannelAttention和SpatialAttention,它们用于在特征图中强调重要的通道或空间信息。CBAM类则结合了这两种注意力机制,形成了一个卷积块注意力模块。
最后,Concat类用于在指定维度上连接多个张量,这在构建复杂的网络结构时非常有用。
总的来说,这个文件提供了一系列灵活且高效的卷积模块和注意力机制,适用于构建和优化深度学习模型,尤其是在目标检测和图像分割等计算机视觉任务中。
```python
import random
import numpy as np
import torch.nn as nn
from ultralytics.data import build_dataloader, build_yolo_dataset
from ultralytics.engine.trainer import BaseTrainer
from ultralytics.models import yolo
from ultralytics.nn.tasks import DetectionModel
from ultralytics.utils import LOGGER, RANK
from ultralytics.utils.torch_utils import de_parallel, torch_distributed_zero_first
class DetectionTrainer(BaseTrainer):
"""
基于检测模型的训练类,继承自BaseTrainer类。
"""
def build_dataset(self, img_path, mode="train", batch=None):
"""
构建YOLO数据集。
参数:
img_path (str): 图像文件夹的路径。
mode (str): 模式,`train`或`val`,用户可以为每种模式自定义不同的增强。
batch (int, optional): 批次大小,仅用于`rect`模式。默认为None。
"""
gs = max(int(de_parallel(self.model).stride.max() if self.model else 0), 32) # 获取模型的最大步幅
return build_yolo_dataset(self.args, img_path, batch, self.data, mode=mode, rect=mode == "val", stride=gs)
def get_dataloader(self, dataset_path, batch_size=16, rank=0, mode="train"):
"""构建并返回数据加载器。"""
assert mode in ["train", "val"] # 确保模式有效
with torch_distributed_zero_first(rank): # 仅在DDP中初始化数据集*.cache一次
dataset = self.build_dataset(dataset_path, mode, batch_size) # 构建数据集
shuffle = mode == "train" # 训练模式下打乱数据
workers = self.args.workers if mode == "train" else self.args.workers * 2 # 设置工作线程数
return build_dataloader(dataset, batch_size, workers, shuffle, rank) # 返回数据加载器
def preprocess_batch(self, batch):
"""对图像批次进行预处理,包括缩放和转换为浮点数。"""
batch["img"] = batch["img"].to(self.device, non_blocking=True).float() / 255 # 将图像转换为浮点数并归一化
if self.args.multi_scale: # 如果启用多尺度
imgs = batch["img"]
sz = (
random.randrange(self.args.imgsz * 0.5, self.args.imgsz * 1.5 + self.stride)
// self.stride
* self.stride
) # 随机选择一个新的尺寸
sf = sz / max(imgs.shape[2:]) # 计算缩放因子
if sf != 1: # 如果缩放因子不为1
ns = [
math.ceil(x * sf / self.stride) * self.stride for x in imgs.shape[2:]
] # 计算新的形状
imgs = nn.functional.interpolate(imgs, size=ns, mode="bilinear", align_corners=False) # 进行插值缩放
batch["img"] = imgs # 更新批次图像
return batch
def get_model(self, cfg=None, weights=None, verbose=True):
"""返回YOLO检测模型。"""
model = DetectionModel(cfg, nc=self.data["nc"], verbose=verbose and RANK == -1) # 创建检测模型
if weights:
model.load(weights) # 加载权重
return model
def plot_training_samples(self, batch, ni):
"""绘制带有注释的训练样本。"""
plot_images(
images=batch["img"],
batch_idx=batch["batch_idx"],
cls=batch["cls"].squeeze(-1),
bboxes=batch["bboxes"],
paths=batch["im_file"],
fname=self.save_dir / f"train_batch{ni}.jpg",
on_plot=self.on_plot,
)
代码注释说明:
- 类和方法定义:定义了一个
DetectionTrainer类,继承自BaseTrainer,用于训练YOLO检测模型。 - 数据集构建:
build_dataset方法用于根据给定的图像路径和模式构建YOLO数据集,支持训练和验证模式。 - 数据加载器:
get_dataloader方法创建数据加载器,支持多进程加载和数据打乱。 - 批次预处理:
preprocess_batch方法对输入的图像批次进行预处理,包括归一化和可选的多尺度调整。 - 模型获取:
get_model方法返回一个YOLO检测模型,并可选择性地加载预训练权重。 - 绘制训练样本:
plot_training_samples方法用于可视化训练样本及其对应的标签。```
这个程序文件train.py是一个用于训练 YOLO(You Only Look Once)目标检测模型的实现,继承自BaseTrainer类。程序中包含了多个方法,用于构建数据集、获取数据加载器、预处理图像、设置模型属性、获取模型、进行验证、记录损失、显示训练进度、绘制训练样本和绘制训练指标等。
首先,DetectionTrainer 类的 build_dataset 方法用于构建 YOLO 数据集。它接收图像路径、模式(训练或验证)和批次大小作为参数,使用 build_yolo_dataset 函数来创建数据集,并根据模型的步幅调整图像的大小。
接下来,get_dataloader 方法构建并返回数据加载器。它会根据模式(训练或验证)来决定是否打乱数据,并设置工作线程的数量。该方法还确保在分布式训练中,数据集只初始化一次。
preprocess_batch 方法用于对图像批次进行预处理,包括将图像缩放到合适的大小并转换为浮点数格式。它还支持多尺度训练,通过随机选择图像大小来增强模型的鲁棒性。
set_model_attributes 方法用于设置模型的属性,包括类别数量和类别名称等,以确保模型能够正确处理输入数据。
get_model 方法返回一个 YOLO 检测模型,并可选择加载预训练权重。get_validator 方法返回一个用于模型验证的 DetectionValidator 实例。
在训练过程中,label_loss_items 方法用于返回带有标签的损失字典,便于记录和监控训练过程中的损失情况。progress_string 方法生成一个格式化的字符串,用于显示训练进度,包括当前的 epoch、GPU 内存使用情况、损失值、实例数量和图像大小等信息。
此外,plot_training_samples 方法用于绘制训练样本及其标注,帮助可视化训练数据的质量。最后,plot_metrics 和 plot_training_labels 方法分别用于绘制训练过程中的指标和标签,便于分析模型的训练效果。
整体而言,这个文件实现了 YOLO 模型训练的核心功能,提供了数据处理、模型构建、训练监控和结果可视化等多方面的支持。
```python
import requests
from pathlib import Path
from zipfile import ZipFile, is_zipfile
from tqdm import tqdm # 进度条库
def safe_download(url, file=None, dir=None, unzip=True, delete=False, retry=3, progress=True):
"""
从指定的 URL 下载文件,并可选择解压和删除下载的文件。
参数:
url (str): 要下载的文件的 URL。
file (str, optional): 下载文件的文件名。如果未提供,将使用 URL 的文件名。
dir (str, optional): 保存下载文件的目录。如果未提供,将使用当前工作目录。
unzip (bool, optional): 是否解压下载的文件。默认值为 True。
delete (bool, optional): 是否在解压后删除下载的文件。默认值为 False。
retry (int, optional): 下载失败时重试的次数。默认值为 3。
progress (bool, optional): 是否在下载过程中显示进度条。默认值为 True。
"""
# 确定下载文件的保存路径
f = Path(dir) / (file if file else url.split('/')[-1]) # 使用 URL 的最后一部分作为文件名
# 检查文件是否已存在
if not f.is_file():
desc = f"正在下载 {url} 到 '{f}'"
print(desc) # 打印下载信息
f.parent.mkdir(parents=True, exist_ok=True) # 创建目录(如果不存在)
for i in range(retry + 1): # 尝试下载,最多重试 retry 次
try:
# 使用 requests 下载文件
response = requests.get(url, stream=True)
response.raise_for_status() # 检查请求是否成功
# 获取文件总大小以便显示进度条
total_size = int(response.headers.get('Content-Length', 0))
with open(f, 'wb') as file_handle:
for data in tqdm(response.iter_content(chunk_size=1024), total=total_size // 1024, unit='KB', disable=not progress):
file_handle.write(data) # 写入文件
break # 下载成功,退出循环
except Exception as e:
if i == retry:
print(f"下载失败: {e}") # 打印错误信息
else:
print(f"下载失败,正在重试 {i + 1}/{retry}...")
# 解压文件(如果需要)
if unzip and f.exists() and f.suffix in ('.zip', '.tar', '.gz'):
unzip_dir = dir or f.parent # 解压到指定目录或当前目录
if is_zipfile(f):
with ZipFile(f, 'r') as zip_ref:
zip_ref.extractall(unzip_dir) # 解压文件
if delete:
f.unlink() # 删除下载的文件
return f # 返回下载的文件路径
代码说明:
-
导入库:导入了
requests用于网络请求,Path用于文件路径操作,ZipFile用于处理 ZIP 文件,tqdm用于显示下载进度条。 -
safe_download函数:这是核心函数,负责从指定 URL 下载文件,并根据参数决定是否解压和删除文件。- 参数:
url:要下载的文件的 URL。file:下载后保存的文件名。dir:文件保存的目录。unzip:是否解压下载的文件。delete:是否在解压后删除下载的文件。retry:下载失败时的重试次数。progress:是否显示下载进度条。
- 参数:
-
文件路径处理:根据提供的目录和文件名构建下载文件的完整路径,并确保目录存在。
-
下载逻辑:使用
requests.get方法下载文件,并通过tqdm显示下载进度。处理下载失败的情况,允许重试。 -
解压文件:如果下载的文件是压缩文件,并且设置了
unzip为True,则使用ZipFile解压文件。 -
返回值:返回下载的文件路径,方便后续操作。```
这个程序文件主要用于处理与Ultralytics YOLO模型相关的文件下载和管理。代码中包含了多个函数,旨在简化文件的下载、解压、删除以及检查等操作,特别是针对YOLO模型的权重文件和其他相关资源。
首先,文件中定义了一些常量,列出了在GitHub上维护的YOLO模型权重文件的名称和路径。这些文件包括不同版本的YOLOv8、YOLOv5、YOLOv3等模型的权重文件。
接下来,定义了一些辅助函数。is_url函数用于检查给定字符串是否为有效的URL,并且可以选择性地检查该URL是否存在。delete_dsstore函数则用于删除特定目录下的.DS_Store文件,这些文件是macOS系统生成的隐藏文件,可能在不同操作系统之间传输时造成问题。
zip_directory和unzip_file函数分别用于压缩和解压指定目录的内容,支持排除特定文件,并且可以显示进度条。check_disk_space函数用于检查下载文件所需的磁盘空间是否足够,确保在下载前有足够的空间。
get_google_drive_file_info函数用于处理Google Drive的分享链接,提取出直接下载链接和文件名。safe_download函数是核心下载函数,支持从URL下载文件,处理Google Drive链接,支持重试机制,并可以选择解压下载的文件。
get_github_assets函数用于从GitHub获取指定仓库的发布版本和资产列表。attempt_download_asset函数尝试从GitHub下载指定的文件,如果本地不存在则进行下载。
最后,download函数用于处理并发下载,如果指定的线程数大于1,则使用线程池进行并发下载,否则顺序下载。这个函数调用了之前定义的safe_download函数,确保下载的文件能够被正确处理。
总体来说,这个文件提供了一系列实用的工具函数,方便用户下载和管理YOLO模型的相关文件,确保在使用这些模型时能够顺利获取所需的资源。
```python
import os
import glob
import torch
from torch.utils.cpp_extension import CUDA_HOME, CppExtension, CUDAExtension
from setuptools import find_packages, setup
# 定义所需的依赖包
requirements = ["torch", "torchvision"]
def get_extensions():
# 获取当前文件的目录
this_dir = os.path.dirname(os.path.abspath(__file__))
# 定义扩展模块的源代码目录
extensions_dir = os.path.join(this_dir, "src")
# 查找主文件和CPU/CUDA源文件
main_file = glob.glob(os.path.join(extensions_dir, "*.cpp"))
source_cpu = glob.glob(os.path.join(extensions_dir, "cpu", "*.cpp"))
source_cuda = glob.glob(os.path.join(extensions_dir, "cuda", "*.cu"))
# 合并源文件
sources = main_file + source_cpu
extension = CppExtension # 默认使用 CppExtension
extra_compile_args = {"cxx": []} # 额外的编译参数
define_macros = [] # 定义的宏
# 检查是否可以使用CUDA
if torch.cuda.is_available() and CUDA_HOME is not None:
extension = CUDAExtension # 使用 CUDAExtension
sources += source_cuda # 添加CUDA源文件
define_macros += [("WITH_CUDA", None)] # 定义宏以启用CUDA支持
extra_compile_args["nvcc"] = [] # CUDA编译器的额外参数
else:
raise NotImplementedError('Cuda is not available') # 如果没有CUDA支持,抛出异常
# 将源文件路径转换为绝对路径
sources = [os.path.join(extensions_dir, s) for s in sources]
include_dirs = [extensions_dir] # 包含目录
ext_modules = [
extension(
"DCNv3", # 扩展模块的名称
sources, # 源文件列表
include_dirs=include_dirs, # 包含目录
define_macros=define_macros, # 定义的宏
extra_compile_args=extra_compile_args, # 额外的编译参数
)
]
return ext_modules # 返回扩展模块列表
# 使用setuptools进行包的设置
setup(
name="DCNv3", # 包名称
version="1.1", # 版本号
author="InternImage", # 作者
url="https://github.com/OpenGVLab/InternImage", # 项目网址
description="PyTorch Wrapper for CUDA Functions of DCNv3", # 描述
packages=find_packages(exclude=("configs", "tests")), # 查找包,排除指定目录
ext_modules=get_extensions(), # 获取扩展模块
cmdclass={"build_ext": torch.utils.cpp_extension.BuildExtension}, # 指定构建扩展的命令类
)
代码核心部分解释:
- 导入模块:导入必要的模块,包括操作系统模块、文件查找模块、PyTorch和setuptools模块。
- 获取扩展函数:
get_extensions函数负责查找源文件,并根据CUDA的可用性选择合适的扩展类型(CPU或CUDA)。 - 设置编译参数:根据CUDA的可用性设置额外的编译参数和宏定义。
- 构建包:使用
setuptools的setup函数定义包的名称、版本、作者、描述等信息,并调用get_extensions获取扩展模块。```
这个程序文件是一个用于设置和编译DCNv3(Deformable Convolutional Networks v3)扩展模块的Python脚本,主要用于PyTorch框架。脚本的结构和功能可以分为几个主要部分。
首先,文件开头包含了一些版权信息和许可证声明,表明该代码是由OpenGVLab开发,并且遵循MIT许可证。接下来,脚本导入了一些必要的库,包括os、glob、torch以及PyTorch的C++扩展工具。
在requirements变量中,定义了该模块所需的依赖包,包括torch和torchvision。
接下来的get_extensions函数是该脚本的核心部分。它的主要任务是查找并准备要编译的C++和CUDA源文件。首先,函数获取当前文件的目录,并构建源文件的路径。它通过glob模块查找主文件、CPU和CUDA相关的源文件。
在确定了源文件后,函数会根据CUDA的可用性选择合适的扩展类型。如果CUDA可用,使用CUDAExtension,并将CUDA源文件添加到编译列表中,同时定义宏WITH_CUDA。如果CUDA不可用,则抛出一个NotImplementedError,提示用户CUDA不可用。
接下来,函数构建了一个包含所有源文件和编译参数的扩展模块列表,并返回这个列表。
最后,脚本调用setup函数来配置模块的构建信息,包括模块名称、版本、作者、描述、需要排除的包(如configs和tests),以及通过get_extensions函数获取的扩展模块列表。cmdclass参数指定了构建扩展时使用的命令类。
总的来说,这个脚本是一个典型的Python扩展模块设置文件,旨在为DCNv3提供PyTorch的CUDA功能封装,方便用户在深度学习项目中使用。
五、源码文件
六、源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 10
10 0
0- 0



 已为社区贡献145条内容
已为社区贡献145条内容

所有评论(0)