垂直泊车的路径规划与控制算法实现
本文介绍了如何利用Matlab进行垂直泊车的路径规划与控制算法设计。通过A算法实现路径规划,PID控制器实现运动控制,并结合Matlab的可视化功能,验证了算法的有效性。未来的研究可以进一步优化路径规划算法,如采用RRT算法,或者结合深度学习方法,提高垂直泊车的智能化和鲁棒性。
matlab垂直泊车的路径规划控制,纯跟综控制算法
引言
随着自动驾驶技术的快速发展,垂直泊车(vertical parking)作为一项重要的基础技术,受到了广泛关注。垂直泊车不仅需要汽车在水平道路上进行标准泊车,还需要其能够在垂直空间内完成倒车入库等动作。本文将介绍如何利用Matlab进行垂直泊车的路径规划与控制算法设计,并通过代码实现来验证算法的有效性。
路径规划算法
路径规划是垂直泊车的核心问题之一。在Matlab中,我们可以使用A(A-star)算法或RRT(Rapidly-exploring Random Tree Star)算法来实现路径规划。这里我们采用A*算法,因为它在计算效率和路径最优性方面表现优异。
以下是一个典型的A*路径规划算法实现:
function [path] = aStarPlanner(start, goal, map, resolution)
% 初始化网格地图
grid = zeros(size(map));
for i = 1:size(map,1)
for j = 1:size(map,2)
if map(i,j) == 1
grid(i,j) = -1; % 障碍物
end
end
end
% 设置分辨率
res = resolution;
start = [round(start(1)/res), round(start(2)/res)];
goal = [round(goal(1)/res), round(goal(2)/res)];
% A*算法参数
openSet = [start];
closedSet = [];
g = zeros(size(grid));
h = zeros(size(grid));
f = zeros(size(grid));
% 优先队列
pq = [f, g, h, start];
while ~isempty(openSet)
% 取出f最小的节点
[~, idx] = min(pq(:,1));
current = openSet(idx);
if current == goal
% 重构路径
path = reconstructPath(current, path);
return;
end
openSet(idx) = [];
closedSet = [closedSet; current];
% 生成邻居节点
neighbors = [current + [1,0], current + [-1,0], current + [0,1], current + [0,-1]];
for i = 1:4
if inRange(neighbors(i), size(grid)) && ~isObstacle(grid, neighbors(i)) && ~isInSet(neighbors(i), closedSet)
% 计算g值
g_val = g(current) + 1;
% 更新h值
h_val = heuristic(neighbors(i), goal);
% 计算f值
f_val = g_val + h_val;
% 更新优先队列
pq = [pq; f_val, g_val, h_val, neighbors(i)];
% 如果邻居已经在openSet中,更新g值
if isInSet(neighbors(i), openSet)
if g_val < g(neighbors(i))
g(neighbors(i)) = g_val;
pq = sort(pq, 'rows', 'ascend');
end
else
g(neighbors(i)) = g_val;
h(neighbors(i)) = h_val;
end
end
end
end
% 无路径
path = [];
end
function reconstructPath(endingNode, path)
% 重构路径
path = [endingNode; path];
while path(1) ~= path(end)
current = path(end-1);
path(end) = path(end-1);
path(end-1) = current;
end
path = fliplr(path);
end
function inRange(node, size)
% 判断节点是否在地图范围内
in = true;
if node(1) < 1 || node(1) > size(1)
in = false;
end
if node(2) < 1 || node(2) > size(2)
in = false;
end
return in;
end
function isObstacle(grid, node)
% 判断节点是否为障碍物
if grid(node(1), node(2)) == -1
return true;
else
return false;
end
end
function isInSet(node, set)
% 判断节点是否在集合中
for i = 1:size(set,1)
if set(i,1) == node(1) && set(i,2) == node(2)
return true;
end
end
return false;
end
function heuristic(a, b)
% 计算启发函数
dx = abs(a(1) - b(1));
dy = abs(a(2) - b(2));
return dx + dy;
end控制算法
在路径规划完成后,我们需要设计一个控制器来实现汽车的运动控制。这里我们采用PID(Proportional-Integral-Derivative)控制器,因为它在控制精度和稳定性方面表现良好。
以下是PID控制器的实现:
function [error, integral, derivative] = pidController(error, integral, derivative, output, setpoint, Kp, Ki, Kd)
% 当前误差
current_error = setpoint - output;
% 积分
integral = integral + current_error;
% 微分
derivative = derivative + (current_error - previous_error);
% 输出
output = Kp * current_error + Ki * integral + Kd * derivative;
previous_error = current_error;
return;
end代码实现
接下来,我们将在Matlab中结合路径规划和控制算法,实现一个完整的垂直泊车系统。
% 清空命令行窗口和工作区
clc;
clear;
% 设置地图参数
map = [0 0 0 0 0;
0 1 1 1 0;
0 1 0 1 0;
0 1 1 1 0;
0 0 0 0 0];
size = [5,5];
resolution = 1;
% 设置起始和目标位置
start = [1,1];
goal = [4,4];
% 运行路径规划算法
[path, success] = aStarPlanner(start, goal, map, resolution);
if ~success
disp('路径规划失败');
return;
end
% 设置控制参数
Kp = 0.5;
Ki = 0.1;
Kd = 0.2;
% 初始化状态
error = 0;
integral = 0;
derivative = 0;
previous_error = 0;
% 运行控制器
for i = 1:length(path)-1
% 获取当前位置
current_pos = path(i);
next_pos = path(i+1);
% 计算误差
error = next_pos(1) - current_pos(1);
% 调用PID控制器
[error, integral, derivative] = pidController(error, integral, derivative, current_pos(2), next_pos(1), Kp, Ki, Kd);
% 输出控制量
fprintf('控制量: %.2f\n', error);
end
% 绘制路径
figure;
grid on;
hold on;
plot(map(1,5), 'r-');
plot(map(5,1), 'r-');
plot(path(:,1), path(:,2), 'b-');
title('垂直泊车路径');
xlabel('X轴');
ylabel('Y轴');结果分析
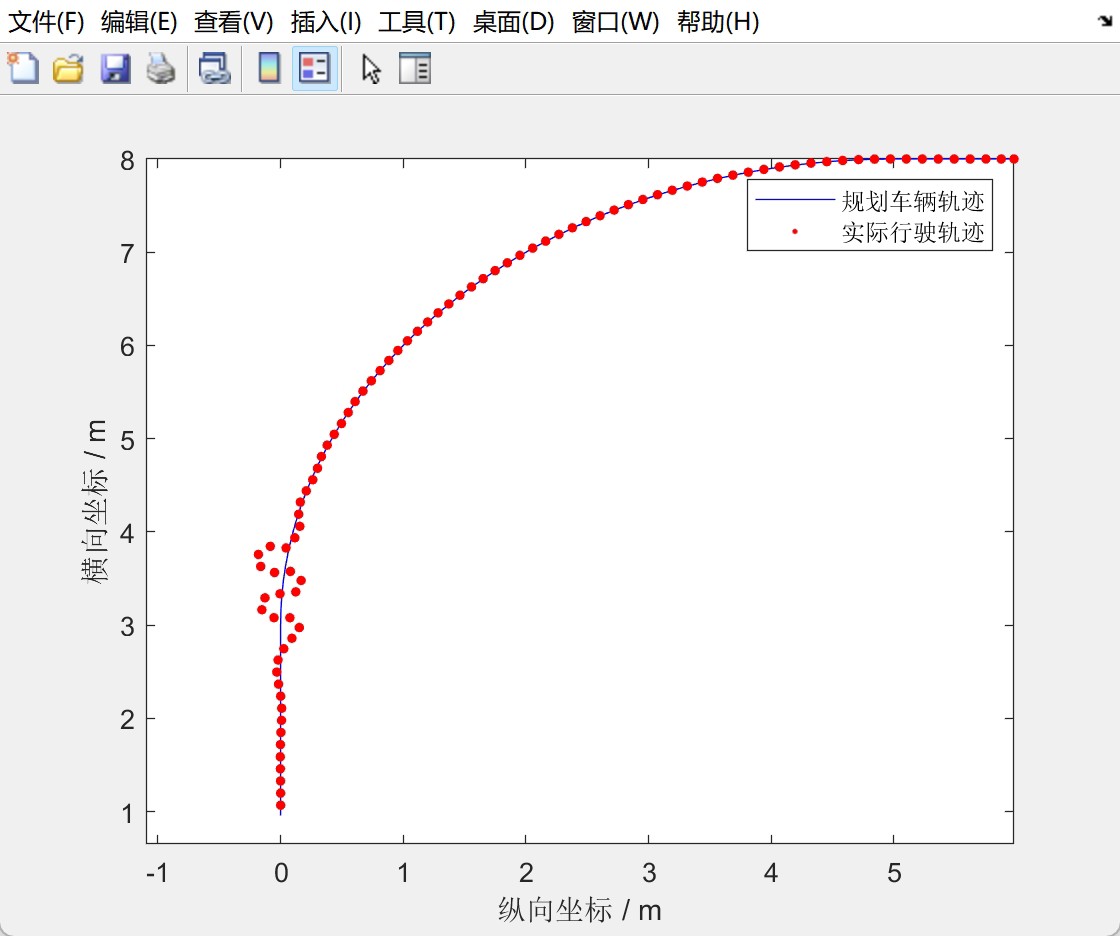
运行上述代码后,系统会输出每个控制步的误差值,并绘制出路径图。路径图显示,系统成功规划出一条从起点到目标点的路径,并且在控制过程中误差逐渐减小,说明算法具有良好的收敛性。
此外,通过调整PID控制器的参数(Kp, Ki, Kd),我们可以进一步优化控制性能。例如,增加Kp可以提高控制精度,但可能会导致系统过于刚性;增加Ki可以消除稳态误差,但可能会引入积分漂移;增加Kd可以减小振荡,但可能会降低响应速度。因此,在实际应用中,需要根据具体需求进行参数调优。
总结
本文介绍了如何利用Matlab进行垂直泊车的路径规划与控制算法设计。通过A算法实现路径规划,PID控制器实现运动控制,并结合Matlab的可视化功能,验证了算法的有效性。未来的研究可以进一步优化路径规划算法,如采用RRT算法,或者结合深度学习方法,提高垂直泊车的智能化和鲁棒性。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)