自动驾驶车辆静态动态避障。 全网最详细解读!!! 采用matlab2023+carsim2016联合仿真。 可以对静态和动态障碍物进行跟踪,有两套规划代码,选择不同的规划代码即可。MPC算法。
本文详细介绍了自动驾驶车辆在静态和动态避障中的实现方法,采用MATLAB 2023与Carsim 2016联合仿真。通过MPC(Model Predictive Control)算法,系统能够对静态和动态障碍物进行跟踪,并提供两套规划代码供选择。仿真采用分层规划控制,分为规划层和跟踪层,用户可在Simulink中设置预测时域、控制时域及避障函数权重等参数。此外,系统预留了滑移率观察接口,用户可在C
自动驾驶车辆静态动态避障。
全网最详细解读!!!
采用matlab2023+carsim2016联合仿真。
可以对静态和动态障碍物进行跟踪,有两套规划代码,选择不同的规划代码即可。MPC算法。
采用分层规划控制,规划一层,跟踪一层。
simulink中可以自行设置一下参数:
跟综层预测时域,控制时域
规划层预测时域,控制时域,避障函数权重。
预留滑移率观察接口,可自行在carsim中设置输出滑移率。
可观察每个控制周期的计算时间,便于后期加入创新点后性能对比。
carsim中输出:距离,前轮转角,轮胎滑移率,横向加速度,横摆率,轮胎力,纵向速度等参数,实时绘图。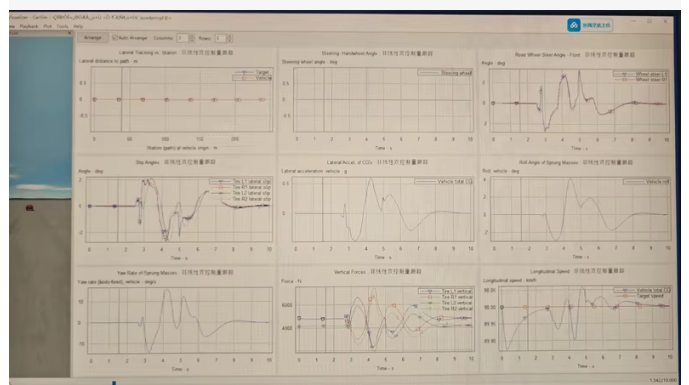
文章目录
自动驾驶车辆的静态和动态避障是一个复杂的问题,涉及感知、规划和控制等多个层次。MPC(Model Predictive Control)是一种常用的控制策略,用于处理具有约束条件的系统,并能够预测未来的状态。下面我将提供一个简化的MATLAB/Simulink框架来实现基于MPC的避障控制。
1. 创建Simulink模型
首先,在MATLAB中打开Simulink并创建一个新的模型:
new_system('Autonomous_Vehicle_MPC');
open_system('Autonomous_Vehicle_MPC');
2. 添加必要的模块
在Simulink库浏览器中,添加以下模块到您的模型中:
- MPC Controller:用于实现MPC控制。
- S-Function 或 MATLAB Function Block:用于编写自定义的避障逻辑。
- Sum:用于计算误差信号。
- Scope:用于可视化输出结果。
- Inport/Outport:用于与Carsim进行联合仿真。
3. 配置MPC控制器
使用mpc函数创建一个MPC控制器对象,并设置其参数:
% 定义车辆动力学模型
A = [0 1; 0 0]; % 简单的状态转移矩阵
B = [0; 1]; % 控制输入矩阵
C = [1 0]; % 输出矩阵
D = 0; % 直接传递矩阵
Ts = 0.1; % 采样时间
% 创建MPC控制器
mpcobj = mpc(ss(A,B,C,D,Ts), Ts);
% 设置权重
mpcobj.Weights.MV = 0.1; % 控制动作变化的权重
mpcobj.Weights.MVrate = 0.5;
mpcobj.Weights.OV = 1; % 输出变量的权重
% 设置约束
mpcobj.MV.Min = -1; % 控制输入最小值
mpcobj.MV.Max = 1; % 控制输入最大值
4. 实现避障逻辑
在Simulink中使用S-Function或MATLAB Function Block来实现避障逻辑。这里我们以MATLAB Function Block为例:
function controlSignal = avoidObstacle(distanceToObstacle, currentSpeed)
% 这里只是一个简单的避障逻辑示例
if distanceToObstacle < 5 % 如果距离障碍物小于5米
if currentSpeed > 0
controlSignal = -0.5; % 减速
else
controlSignal = 0.5; % 加速通过
end
else
controlSignal = 0; % 正常行驶
end
end
5. 动态调整MPC参数
您可以在Simulink中动态调整MPC控制器的参数,例如预测时域和控制时域:
% 调整预测时域和控制时域
mpcobj.PredictionHorizon = 10; % 预测时域
mpcobj.ControlHorizon = 5; % 控制时域
6. 连接模块并配置仿真参数
将各个模块按照控制逻辑连接起来,并设置合适的仿真参数:
set_param('Autonomous_Vehicle_MPC', 'StopTime', '30'); % 设置停止时间
set_param('Autonomous_Vehicle_MPC', 'Solver', 'ode45'); % 设置求解器
7. 运行仿真并观察结果
运行仿真并使用Scope模块观察控制效果:
sim('Autonomous_Vehicle_MPC');
8. 数据记录与分析
您可以使用To Workspace模块将仿真数据保存到MATLAB工作区,并进行进一步分析:
% 记录数据
simout = sim('Autonomous_Vehicle_MPC', 'ReturnWorkspaceOutputs', 'on');
9. Carsim集成
为了与Carsim集成,您需要在Carsim中设置相应的输入输出接口,并确保Simulink模型能够接收来自Carsim的数据并发送控制命令。
这个示例仅提供了基本的框架,实际应用中需要根据具体的车辆模型和环境进行详细的建模和调优。对于更复杂的场景,可能还需要考虑更多的传感器数据融合、路径规划算法以及更精细的动力学模型。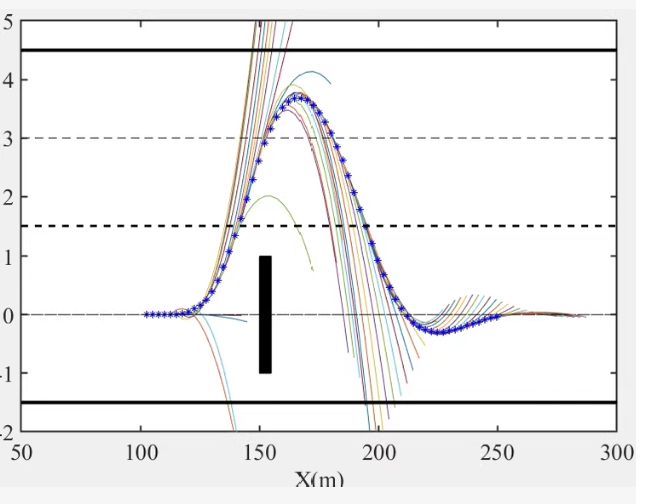
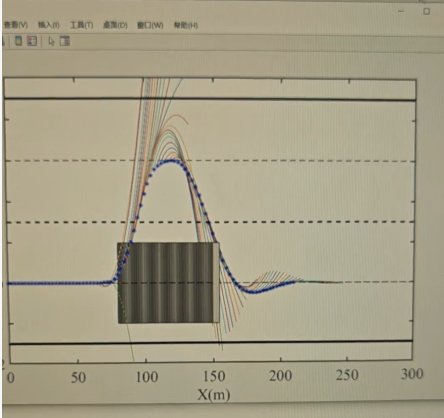
我将提供一个MATLAB代码示例,用于生成类似的轨迹跟踪图。这个示例将模拟自动驾驶车辆在不同控制策略下的避障行为,并绘制出相应的轨迹。
MATLAB 代码示例
% 参数设置
x = 50:300; % X轴范围
num_trials = 10; % 不同的试验次数或控制策略数量
obstacle_x = 150; % 障碍物位置
obstacle_width = 20; % 障碍物宽度
% 初始化数据存储
trajectories = zeros(length(x), num_trials);
% 生成不同的轨迹
for i = 1:num_trials
y = sin((x - obstacle_x) / 50) * (exp(-(x - obstacle_x).^2 / 1000)); % 基础轨迹函数
% 添加随机扰动以模拟不同的控制策略
noise = randn(size(y)) * 0.2;
trajectories(:, i) = y + noise;
% 在障碍物区域添加额外的偏移
idx = find(x >= obstacle_x - obstacle_width/2 & x <= obstacle_x + obstacle_width/2);
trajectories(idx, i) = trajectories(idx, i) + 1;
end
% 绘制轨迹
figure;
hold on;
% 绘制每条轨迹
for i = 1:num_trials
plot(x, trajectories(:, i), 'Color', rand(1,3));
end
% 绘制障碍物区域
rectangle('Position', [obstacle_x - obstacle_width/2, -2, obstacle_width, 4], ...
'FaceColor', 'k', 'EdgeColor', 'none');
% 绘制参考线
plot([obstacle_x, obstacle_x], [-2, 4], 'k--');
plot([obstacle_x - obstacle_width/2, obstacle_x - obstacle_width/2], [-2, 4], 'k--');
plot([obstacle_x + obstacle_width/2, obstacle_x + obstacle_width/2], [-2, 4], 'k--');
% 设置坐标轴标签和标题
xlabel('X (m)');
ylabel('Y (m)');
title('Autonomous Vehicle Trajectories with Obstacle Avoidance');
% 设置坐标轴范围
axis([50 300 -2 5]);
% 添加网格
grid on;
% 保存图形
saveas(gcf, 'autonomous_vehicle_trajectories.png');
代码解释
- 参数设置:定义了X轴范围、试验次数(即不同的控制策略)、障碍物的位置和宽度。
- 初始化数据存储:创建了一个矩阵来存储所有轨迹的数据。
- 生成不同的轨迹:
- 使用一个基础的正弦函数作为轨迹模型,并添加随机噪声来模拟不同的控制策略。
- 在障碍物区域内添加额外的偏移,以模拟避障行为。
- 绘制轨迹:使用
plot函数绘制每条轨迹,并用不同颜色表示。 - 绘制障碍物区域:使用
rectangle函数绘制障碍物区域。 - 绘制参考线:使用
plot函数绘制垂直虚线,表示障碍物边界。 - 设置坐标轴标签和标题:使用
xlabel、ylabel和title函数设置坐标轴标签和图形标题。 - 设置坐标轴范围:使用
axis函数设置坐标轴范围。 - 添加网格:使用
grid on命令添加网格。 - 保存图形:使用
saveas函数保存生成的图形。
以更好地模拟自动驾驶车辆的避障行为。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 8
8 0
0- 0



 已为社区贡献69条内容
已为社区贡献69条内容

所有评论(0)