【YOLO数据集】无人机视角目标检测
无人机视角下的目标检测是计算机视觉领域的重要研究方向,随着无人机技术的快速发展和广泛应用,其相关研究也日益受到关注。与传统固定摄像头或地面拍摄视角不同,无人机能够提供独特的俯视或倾斜视角,具备高度灵活、视野广阔的优势,已广泛应用于城市规划、农业监测、灾害救援、交通管理、安防巡逻等多个领域。近年来,随着深度学习的突破,尤其是卷积神经网络和Transformer等模型的发展,无人机目标检测在精度和效率
📥 1、背景
无人机视角下的目标检测是计算机视觉领域的重要研究方向,随着无人机技术的快速发展和广泛应用,其相关研究也日益受到关注。与传统固定摄像头或地面拍摄视角不同,无人机能够提供独特的俯视或倾斜视角,具备高度灵活、视野广阔的优势,已广泛应用于城市规划、农业监测、灾害救援、交通管理、安防巡逻等多个领域。然而,无人机视角也带来了一系列特有的技术挑战:目标通常尺度较小且分布密集;拍摄角度多变导致目标外观、姿态和光照条件变化剧烈;高速飞行可能引起运动模糊;同时还需兼顾实时处理与能耗限制。近年来,随着深度学习的突破,尤其是卷积神经网络和Transformer等模型的发展,无人机目标检测在精度和效率上取得了显著进展,但如何在复杂动态环境中实现鲁棒、高效、轻量化的检测,仍然是当前研究的关键问题。因此,探索适用于无人机视角的目标检测方法,对于推动相关实际应用具有重要意义。
📌 2、数据集概览
| 项目 | 内容 |
|---|---|
| 数据集名称 | 无人机视角目标检测数据集 |
| 任务类型 | 目标检测(Object Detection) |
| 类别 | pedestrian、people、bicycle、car、van、truck、tricycle、awning-tricycle、bus、motor |
| 标注格式 | YOLO TXT 格式(<类别> <中心x> <中心y> <宽度> <高度>,坐标和尺寸均为相对于图像宽高的归一化值(0-1)) |
| 图片总数 | 8629 |
| 标注总数 | 457066 |
🗂 3、数据详情
| 类别ID | 类别名称 | 图片数量 | 标注数量 |
|---|---|---|---|
| 0 | pedestrian | 7083 | 109187 |
| 1 | people | 5226 | 38560 |
| 2 | bicycle | 3496 | 13069 |
| 3 | car | 8178 | 187005 |
| 4 | van | 6537 | 32702 |
| 5 | truck | 4567 | 16284 |
| 6 | tricycle | 2270 | 6387 |
| 7 | awning-tricycle | 1604 | 4377 |
| 8 | bus | 2992 | 9117 |
| 9 | motor | 5516 | 40378 |
| 总计 | - | 8629 | 457066 |
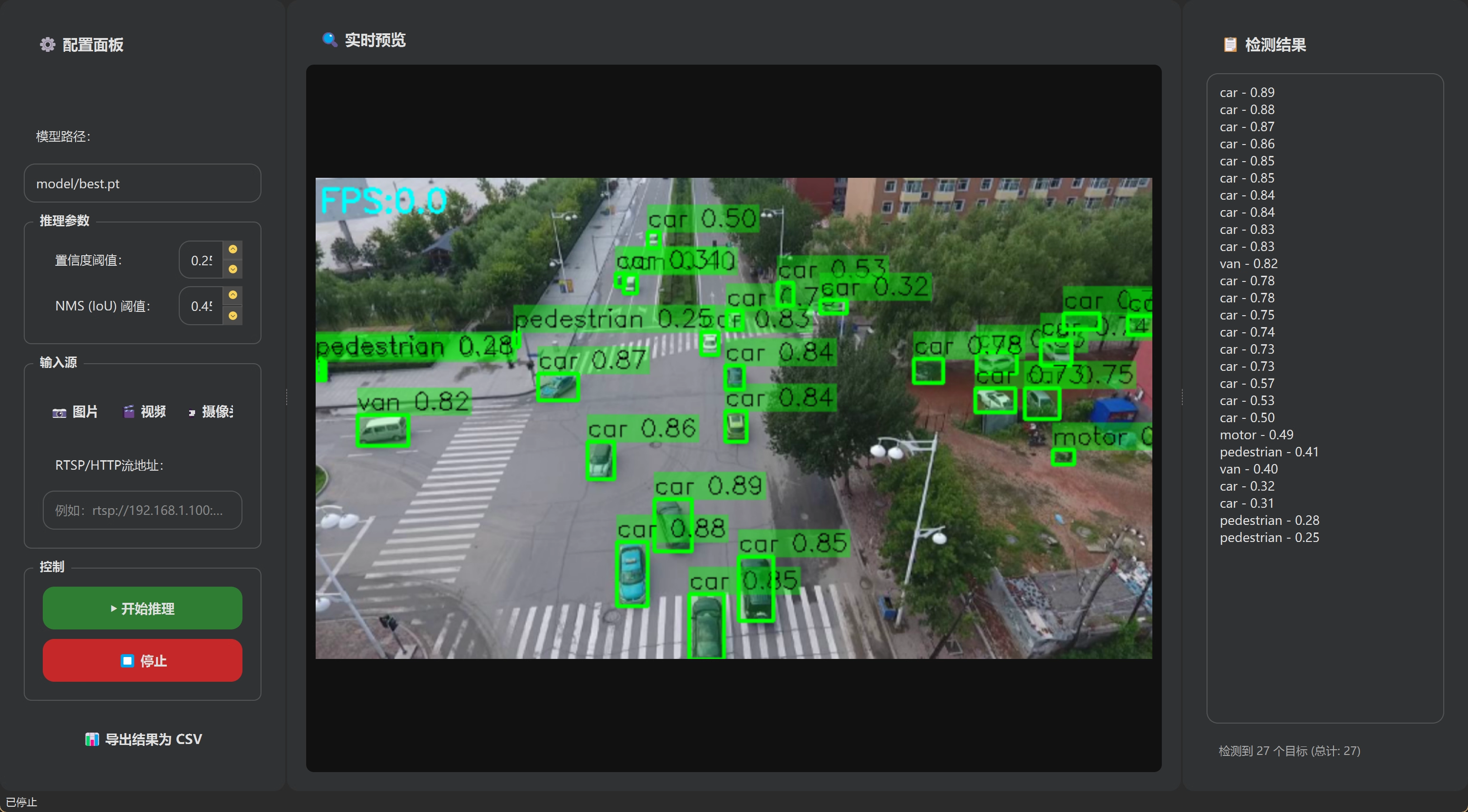
✨ 4、效果演示
🧠 5、模型训练
1、安装miniconda
地址: https://repo.anaconda.com/miniconda/Miniconda3-latest-Windows-x86_64.exe
环境变量(根据实际的安装目录配置):
C:\ProgramData\miniconda3
C:\ProgramData\miniconda3\Scripts
C:\ProgramData\miniconda3\Library\bin
2、创建虚拟环境
conda create -n yolo python==3.8
# 查看现有环境
conda env list
# 激活环境
conda activate yolo
# 激活失败 (执行该命令后重新进入cmd)
conda init cmd.exe
3、源码下载
https://github.com/ultralytics/ultralytics
(注意:不同版本的yolo在不同tag)
4、训练脚本
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO('ultralytics/cfg/models/v8/yolov8n.pt') # 指定YOLO模型对象,并加载指定配置文件中的模型配置
# model.load('yolov8s.pt') #加载预训练的权重文件'yolov8s.pt',加速训练并提升模型性能
model.train(data='ultralytics/cfg/datasets/data36.yaml', # 指定训练数据集的配置文件路径,这个.yaml文件包含了数据集的路径和类别信息
cache=False, # 是否缓存数据集以加快后续训练速度,False表示不缓存
imgsz=640, # 指定训练时使用的图像尺寸,640表示将输入图像调整为640x640像素
epochs=100, # 设置训练的总轮数为200轮
batch=8, # 设置每个训练批次的大小为16,即每次更新模型时使用16张图片
close_mosaic=0, # 设置在训练结束前多少轮关闭 Mosaic 数据增强,10 表示在训练的最后 10 轮中关闭 Mosaic workers=16, # 设置用于数据加载的线程数为8,更多线程可以加快数据加载速度
patience=300, # 在训练时,如果经过50轮性能没有提升,则停止训练(早停机制)
device='0', # 指定使用的设备,'0'表示使用第一块GPU进行训练
optimizer='SGD', # 设置优化器为SGD(随机梯度下降),用于模型参数更新
)
5、配置文件 data.yaml
path: E:/data/yoloTrain/uav
test: test/images # test images
train: train/images # train images
val: val/images # val images
names:
0: pedestrian
1: people
2: bicycle
3: car
4: van
5: truck
6: tricycle
7: awning-tricycle
8: bus
9: motor
🛠 6、配套服务
我们提供一站式视觉解决方案,包括:
- 模型训练与调优指导
- 部署环境远程配置
- 定制标注与数据增强
- 毕业设计/课题辅导
- 企业项目合作开发
❓ 7、常见问题
Q:标注格式如何转换?
A:提供Python转换脚本,支持YOLO→VOC/COCO,开箱即用:点击下载转换脚本
我这边客户资料同步身份证号

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 8
8 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)