基于改进自适应蚁群算法MAACO的多无人载具路径规划——MATLAB实现
蚁群算法模拟蚂蚁觅食过程中寻找最短路径的行为。在路径规划里,蚂蚁在地图(环境)上爬行,通过释放信息素留下“痕迹”,后续蚂蚁依据信息素浓度选择路径。改进自适应蚁群算法MAACO在此基础上,对信息素更新规则、启发式信息等方面做了优化,以提升算法的收敛速度和寻优能力。比如,传统蚁群算法信息素更新较为单一,MAACO可能会根据路径的优劣动态调整信息素的挥发和增强程度。
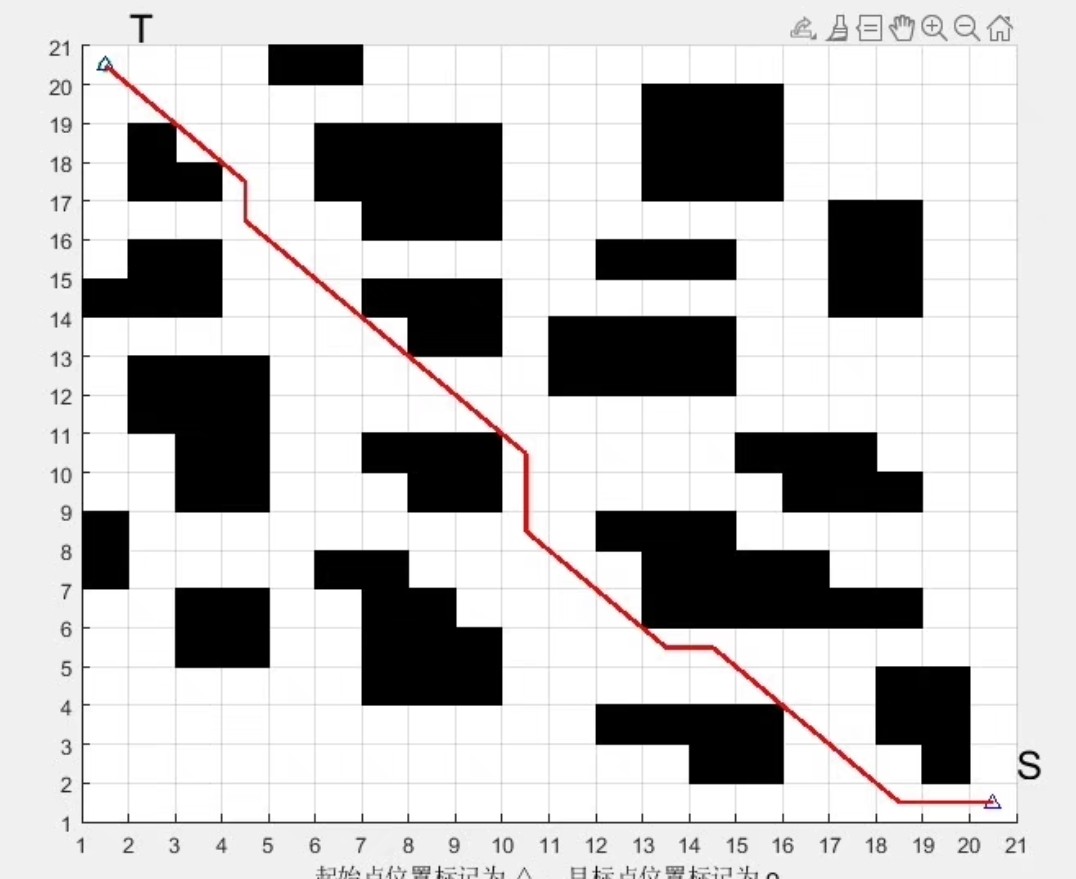
顶刊复现,基于改进自适应蚁群算法MAACO的机器人,无人船,无人机,无人车,自动驾驶的路径规划算法,MATLAB编写,可以修改地图信息 输出如下图所示,只有一条轨迹的那张。 包括源代码和参考文献,有详细注释
在机器人、无人船、无人机以及无人车等自动驾驶领域,路径规划一直是核心问题。今天,咱们来聊聊基于改进自适应蚁群算法MAACO的路径规划,并且使用MATLAB实现,还能修改地图信息哦。
一、改进自适应蚁群算法MAACO简介
蚁群算法模拟蚂蚁觅食过程中寻找最短路径的行为。在路径规划里,蚂蚁在地图(环境)上爬行,通过释放信息素留下“痕迹”,后续蚂蚁依据信息素浓度选择路径。改进自适应蚁群算法MAACO在此基础上,对信息素更新规则、启发式信息等方面做了优化,以提升算法的收敛速度和寻优能力。比如,传统蚁群算法信息素更新较为单一,MAACO可能会根据路径的优劣动态调整信息素的挥发和增强程度。
二、MATLAB代码实现
1. 地图初始化
% 定义地图尺寸
map_size = [100, 100];
% 创建一个简单的二维地图,0表示可通行,1表示障碍物
map = zeros(map_size(1), map_size(2));
% 设置一些障碍物
map(20:30, 40:50) = 1;
map(60:70, 70:80) = 1; 代码分析:这里我们首先定义了地图的尺寸为100x100。然后创建了一个全零矩阵代表地图,0意味着该位置可通行。接着通过给矩阵特定区域赋值1来设置障碍物,模拟真实环境中的不可通过区域。
2. 蚁群算法参数初始化
% 蚂蚁数量
num_ants = 50;
% 最大迭代次数
max_iterations = 200;
% 信息素重要程度因子
alpha = 1;
% 启发式信息重要程度因子
beta = 5;
% 信息素挥发系数
rho = 0.1;
% 初始信息素浓度
tau0 = 1; 代码分析:这些参数对算法性能影响很大。蚂蚁数量决定了一次迭代中探索路径的多样性;最大迭代次数限制了算法运行时间,避免无限循环。alpha和beta分别控制信息素和启发式信息在路径选择中的权重。rho表示信息素挥发程度,tau0是初始信息素浓度。
3. 路径搜索与信息素更新
% 存储每次迭代的最优路径长度
best_path_lengths = zeros(max_iterations, 1);
% 存储每次迭代的最优路径
best_paths = cell(max_iterations, 1);
for iter = 1:max_iterations
% 初始化每只蚂蚁的路径
ant_paths = cell(num_ants, 1);
for ant = 1:num_ants
current_position = [1, 1]; % 蚂蚁从起点[1,1]出发
path = [current_position];
while ~isequal(current_position, [map_size(1), map_size(2)]) % 终点为右下角
% 计算转移概率
probabilities = calculate_transition_probabilities(current_position, map, alpha, beta);
% 选择下一个位置
next_position = select_next_position(probabilities);
path = [path; next_position];
current_position = next_position;
end
ant_paths{ant} = path;
end
% 计算每只蚂蚁路径长度
path_lengths = cellfun(@(x) size(x, 1) - 1, ant_paths);
[min_path_length, best_ant_index] = min(path_lengths);
best_path_lengths(iter) = min_path_length;
best_paths{iter} = ant_paths{best_ant_index};
% 更新信息素
map = update_pheromone(map, ant_paths, rho, min_path_length);
end代码分析:这里外层循环控制迭代次数。每次迭代中,先初始化每只蚂蚁的路径,蚂蚁从起点出发,通过计算转移概率选择下一个位置,直到到达终点。记录每只蚂蚁路径长度,找出最优路径及其长度。最后根据本次迭代结果更新地图上的信息素。
4. 辅助函数
function probabilities = calculate_transition_probabilities(current_position, map, alpha, beta)
% 获取当前位置的邻居
neighbors = get_neighbors(current_position, map);
num_neighbors = size(neighbors, 1);
probabilities = zeros(num_neighbors, 1);
for i = 1:num_neighbors
neighbor = neighbors(i, :);
% 信息素浓度
tau = map(neighbor(1), neighbor(2));
% 启发式信息(这里简单以距离终点的倒数衡量)
eta = 1 / norm(neighbor - [size(map, 1), size(map, 2)]);
probabilities(i) = tau^alpha * eta^beta;
end
probabilities = probabilities / sum(probabilities);
end
function next_position = select_next_position(probabilities)
r = rand();
cumulative_probabilities = cumsum(probabilities);
next_position_index = find(cumulative_probabilities >= r, 1, 'first');
next_position = get_neighbors([1, 1], zeros(100, 100))(next_position_index, :);
end
function map = update_pheromone(map, ant_paths, rho, best_path_length)
% 信息素挥发
map = (1 - rho) * map;
for ant = 1:numel(ant_paths)
path = ant_paths{ant};
for i = 1:size(path, 1) - 1
current_position = path(i, :);
next_position = path(i + 1, :);
% 信息素增强
map(next_position(1), next_position(2)) = map(next_position(1), next_position(2)) + 1 / best_path_length;
end
end
end
function neighbors = get_neighbors(current_position, map)
neighbors = [];
row = current_position(1);
col = current_position(2);
if row > 1 && map(row - 1, col) == 0
neighbors = [neighbors; row - 1, col];
end
if row < size(map, 1) && map(row + 1, col) == 0
neighbors = [neighbors; row + 1, col];
end
if col > 1 && map(row, col - 1) == 0
neighbors = [neighbors; row, col - 1];
end
if col < size(map, 2) && map(row, col + 1) == 0
neighbors = [neighbors; row, col + 1];
end
end代码分析:calculatetransitionprobabilities函数计算蚂蚁从当前位置转移到邻居位置的概率,综合考虑信息素浓度和启发式信息。selectnextposition函数根据转移概率选择下一个位置。updatepheromone函数负责信息素的挥发和增强。getneighbors函数获取当前位置的可通行邻居。
5. 结果展示
% 绘制地图和最优路径
figure;
imagesc(map);
colormap(gray);
hold on;
plot(best_paths{end}(:, 2), best_paths{end}(:, 1), 'r', 'LineWidth', 2);
hold off; 代码分析:这里使用imagesc函数绘制地图,colormap(gray)设置地图颜色为灰度。然后使用plot函数在地图上绘制最优路径,红色线条表示路径,LineWidth设置线条宽度。
三、参考文献
[1] Dorigo, M., & Gambardella, L. M. (1997). Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Transactions on Evolutionary Computation, 1(1), 53-66.
[2] 你可根据实际改进点,查阅相关改进蚁群算法的文献补充。
以上就是基于改进自适应蚁群算法MAACO的多无人载具路径规划在MATLAB中的实现,大家可以根据实际需求调整地图信息、算法参数等来优化路径规划效果。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 14
14 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)