C#基于海康视觉VM4.1的二次开发框架源码,有多流程框架 运动控制卡 服务框架
C#基于海康视觉VM4.1的二次开发框架源码,有多流程框架 运动控制卡 服务框架 需要有海康VM的基础并且有海康威视VM开发狗
一、框架概述
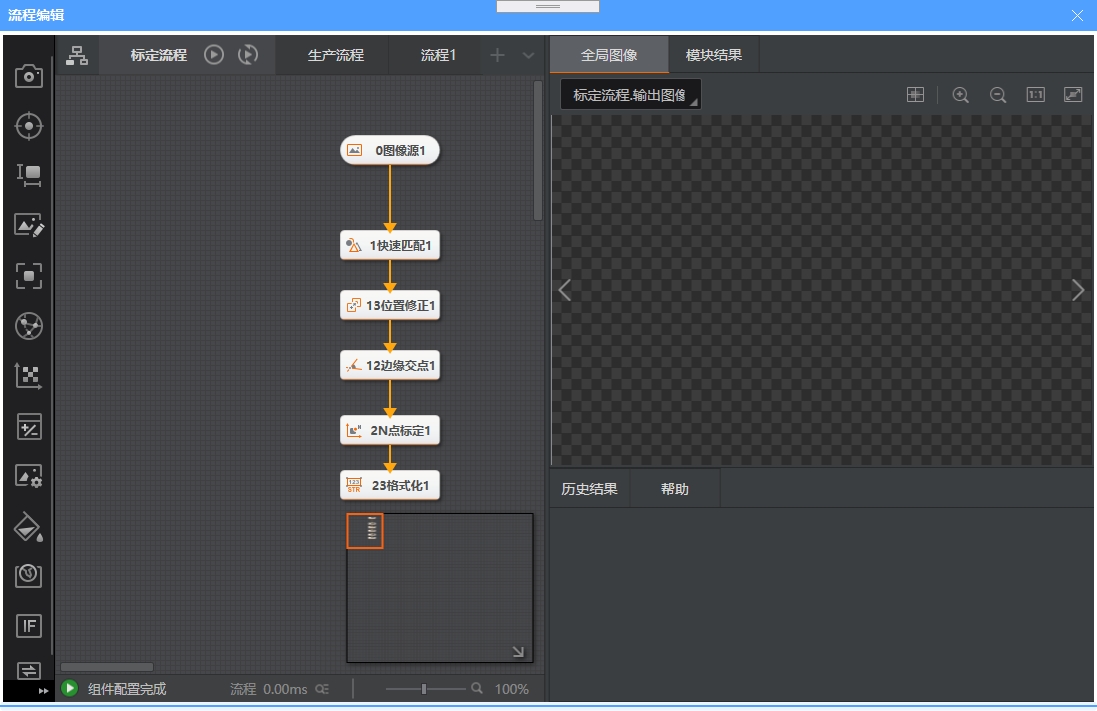
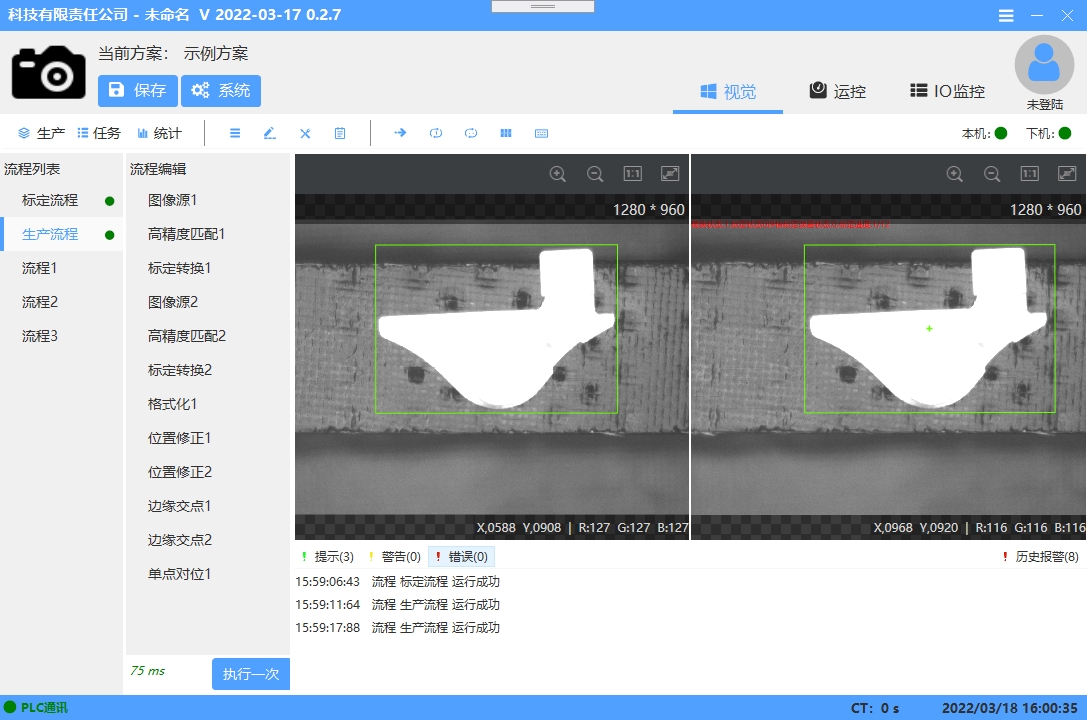
GVM V2.7 是基于 C# 语言开发,依托海康威视 VM4.1 视觉平台构建的二次开发框架,专为工业自动化场景设计,整合了多流程管理、运动控制、设备通讯、光源控制及打标控制等核心功能。框架采用模块化架构,通过清晰的类层次与接口设计,实现了对工业场景中主流硬件设备的兼容与管控,同时支持灵活的服务启动配置与跨设备数据交互,为工业视觉检测与自动化控制提供了稳定、可扩展的开发基础。
C#基于海康视觉VM4.1的二次开发框架源码,有多流程框架 运动控制卡 服务框架 需要有海康VM的基础并且有海康威视VM开发狗
框架开发环境依赖 .NET Framework 4.6.1,需配合海康威视 VM 开发环境及对应硬件加密狗使用,支持 Windows 系统下的系统服务或 EXE 两种启动模式,可根据实际部署需求灵活切换。
二、核心配置模块(App.config)
配置文件作为框架的“启动入口开关”,定义了服务启动模式、远程连接参数及程序集依赖规则,是框架初始化的核心依据。
1. 服务启动配置
- 启动模式控制:通过
StartServerByExe键控制服务启动形式,value="0"表示默认以系统服务模式启动(适合后台长期运行,随系统开机自启);value="1"则以 EXE 可执行程序模式启动(便于开发调试与日志查看)。 - 远程连接参数:
ServerSetting键预留远程服务端地址配置(格式为IP:端口,如127.0.0.1:5556),可用于跨主机连接远程服务,实现分布式设备管控。
2. 程序集与依赖配置
- 程序集探测路径:
probing节点定义了框架依赖库的扫描路径,涵盖自定义库(myLibs)、第三方库(3rdLib,含 Log4Net、Newtonsoft.Json、OpenCv 等)及硬件模块库(运动控制、光源控制、通讯模块等),确保框架启动时能正确加载各类依赖组件。 - 版本绑定:通过
dependentAssembly节点对System.Threading.Tasks.Extensions组件进行版本绑定,将旧版本(0.0.0.0-4.2.0.1)统一重定向至 4.2.0.1 版本,避免版本冲突导致的运行异常。
三、服务通讯模块
服务通讯模块是框架与外部设备交互的“桥梁”,涵盖串口通讯、TCP/IP 通讯两类核心通讯方式,支持与 PLC、传感器、远程服务器等设备的稳定数据交互。
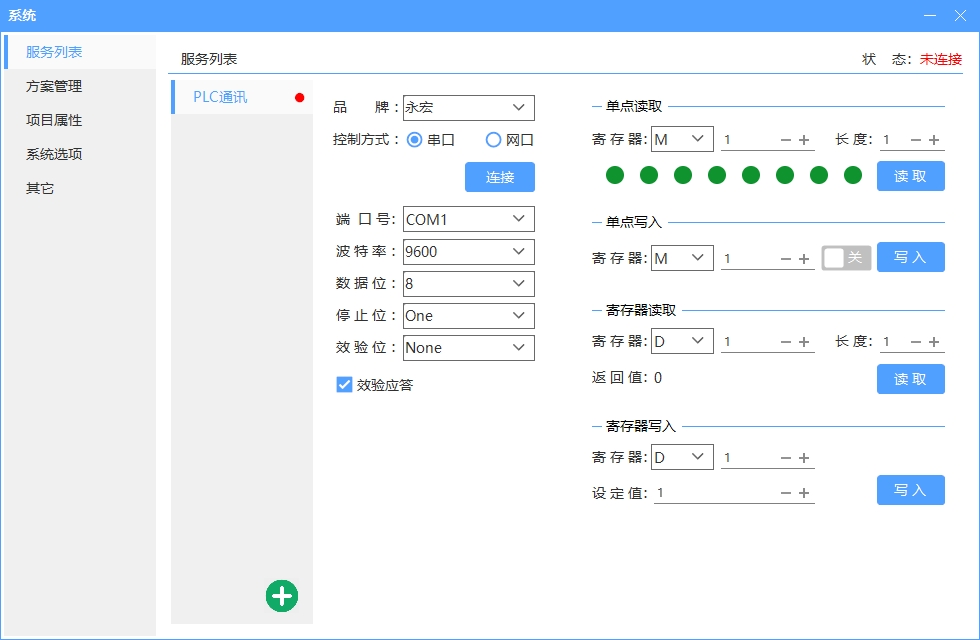
1. 串口通讯(Serial 类)
专注于串口设备的连接与数据收发,适用于近距离、低速率的设备通讯(如 PLC、光源控制器),核心功能包括:
- 参数配置:支持自定义串口号(默认 COM1)、波特率(默认 9600)、数据位(默认 8)、停止位(默认 1 位)及奇偶校验位(默认奇校验),满足不同串口设备的通讯协议要求。
- 连接管理:通过
Open()方法初始化串口连接,自动检测串口状态并处理打开异常;Close()方法安全关闭串口,避免资源泄漏;Send()方法实现指令发送与响应接收,并提供超时处理与错误提示。 - 状态缓存:采用静态字典
L_serialPort存储串口对象(键为服务名,值为 SerialPort 实例),解决 SerialPort 类不可序列化的问题,确保多串口设备的独立管理。
2. TCP/IP 通讯
分为 TCP 客户端(TCPClient 类)与 TCP 服务端(TCPSever 类),支持跨网络的高速数据传输,适用于远程设备监控与数据交互。
(1)TCP 客户端(TCPClient 类)
作为主动连接方,用于连接远程服务端(如远程控制器、上位机),核心能力包括:
- 灵活连接:支持配置服务端 IP(默认 127.0.0.1)与端口(默认 6000),提供连接超时控制(默认 200ms)、自动重连(
autoConnect开关)及失败重试机制,确保网络波动时的连接稳定性。 - 数据收发:
Send()方法实现消息发送与发送次数统计,Recieve()方法异步接收服务端数据,支持十六进制(hexMode开关)与 ASCII 码两种收发模式,满足不同设备的数据格式要求。 - 日志与历史记录:自动保存通讯日志至本地(按日期、小时分档存储),同时缓存最近 200 条通讯记录,便于问题排查与数据追溯。
(2)TCP 服务端(TCPSever 类)
作为被动监听方,支持多客户端同时连接(如多台检测设备),核心能力包括:
- 监听管理:通过
Connect()方法启动端口监听,自动检测 IP 与端口冲突;支持动态管理客户端连接,自动分配客户端名称(默认“未命名_序号”),并允许手动重命名。 - 多客户端管控:采用
SeverItem结构体存储服务端信息,包含服务端 Socket、客户端列表(L_clientItem)及监听状态,支持单独向某一客户端发送数据(Send()方法)或断开指定客户端连接。 - 状态可视化:实时更新客户端连接状态(绿色表示在线,红色表示离线),并同步至主界面按钮颜色,便于操作人员直观掌握设备通讯状态。
四、硬件控制模块
硬件控制模块是框架的“执行核心”,涵盖 PLC 控制、运动控制、光源控制及打标控制,实现对工业自动化关键硬件的精细化管控。
1. PLC 控制(PLCBase 及其子类)
采用“基类定义接口 + 子类实现协议”的设计模式,支持不同品牌 PLC 的兼容控制,当前已实现永宏(PLCFatek 类)与三菱(PLCMelsecSerial 类)PLC 的适配。
- 基类抽象:
PLCBase定义了 PLC 控制的通用接口,包括初始化(Open())、关闭(Close())、寄存器读写(ReadBool()、ReadWord()、WriteBool()、WriteWord())等,统一了不同品牌 PLC 的控制逻辑。 - 协议适配:子类针对具体品牌 PLC 的通讯协议实现细节逻辑,例如永宏 PLC 采用自定义指令格式与累加校验和(
SumCheck()方法)确保数据完整性,三菱 PLC 则适配其专用串口通讯协议,实现寄存器数据的精准读写。 - 连接检测:通过
Connected属性实时检测 PLC 连接状态(串口通讯检测 SerialPort 打开状态,以太网通讯直接返回在线状态),异常时触发错误提示。
2. 运动控制(CardBase 及其子类)
专注于运动控制卡的轴控制与 IO 管理,当前支持雷赛 DMC1000B 运动控制卡(CardDMC1000B 类)与雷赛 IOC0640 IO 卡(CardIOC0640 类),核心功能包括:
- 轴管理:支持多轴(最多 8 轴)独立控制,可配置轴名称、脉冲比(脉冲/毫米)、回零模式、软限位(正负极限)等参数,满足直线运动、圆弧运动等复杂轨迹控制需求。
- 回零控制:
Home()方法实现自动回零,支持负方向回零逻辑(检测原点与限位信号,自动规避限位冲突),并提供回退距离、回零速度等参数配置,确保回零精度。 - IO 控制:通过
SetDo()/GetDoSts()方法控制通用输出点,GetDiSts()方法读取输入点状态,支持输入/输出逻辑电平配置,适配不同 IO 设备的信号极性要求。
3. 光源控制(LightBase 及其子类)
针对工业视觉场景的光源调节需求,支持大恒系列光源控制器(普通光源:LightDaHeng 类;UV 光源:LightDaHengUV 类),核心功能包括:
- 通道管理:支持多通道(最多 8 通道)独立控制,可配置通道名称、亮度值(0-255)及开关状态,支持单通道启停(
OpenCh()/CloseCh())与全通道批量启停(OpenAllCh()/CloseAllCh())。 - 亮度调节:
SetValue()方法精确设置通道亮度,GetValue()方法读取当前亮度值,UV 光源控制器额外支持 UV 强度调节与状态检测,满足特殊材质的检测需求。 - 通讯适配:支持串口(默认波特率 19200)与以太网两种控制方式,自动检测通讯状态,异常时触发弹窗提示与日志记录。
4. 打标控制(MarkBase 及其子类)
适配金橙子 EZD3 系列打标卡(Mark_Ezd3 类),用于激光打标场景的振镜控制与打标参数配置,核心功能包括:
- 振镜控制:支持振镜位置的绝对移动(
MoveAbs())与相对移动(MoveRel()),可配置移动速度(默认 4000mm/s),满足不同打标精度要求。 - 打标配置:支持打标参数(功率、频率、脉冲宽度)的灵活配置,支持多图层管理与对象打标(文本、条码、位图),并提供红光预览功能,便于打标位置校准。
- IO 联动:集成打标卡 IO 端口控制,支持通过输入信号触发打标(如外部传感器信号),输出信号同步控制外部设备(如输送带启停),实现打标与生产流程的联动。
五、框架设计亮点与扩展建议
1. 设计亮点
- 模块化架构:各功能模块(通讯、运动、光源、打标)独立封装,通过基类定义统一接口,子类实现具体逻辑,便于新增硬件设备的适配(如新增其他品牌 PLC 仅需继承 PLCBase 并实现协议)。
- 稳定性保障:关键操作(如连接、数据收发)均包含异常处理与重试机制,同时提供详细的日志记录(按时间分档存储),便于问题定位;静态字典缓存不可序列化对象(如 Socket、SerialPort),确保多设备管理的稳定性。
- 易用性设计:提供可视化界面(如 FrmTCPClient、FrmCard)实时展示设备状态与通讯日志,支持参数配置与手动控制,降低操作人员的使用门槛。
2. 扩展建议
- 硬件适配:可基于现有基类扩展新设备支持(如西门子 PLC、Keyence 视觉传感器),只需实现对应基类的抽象方法,无需修改框架核心逻辑。
- 功能增强:新增数据可视化模块(如运动轨迹实时绘制、打标效果预览),或集成 MQTT 协议支持物联网场景的远程监控。
- 性能优化:针对高频率数据收发场景,可引入异步通讯(如 Async/Await)替代传统线程睡眠(Thread.Sleep),提升框架的响应速度与并发能力。
六、总结
GVM V2.7 框架通过模块化设计、灵活的配置与稳定的硬件控制,为工业自动化场景提供了完整的二次开发解决方案。其核心价值在于降低海康 VM 平台的二次开发门槛,统一硬件设备的控制接口,同时兼顾稳定性与可扩展性,可广泛应用于视觉检测、激光打标、自动化装配等工业场景。开发者可基于现有模块快速搭建定制化系统,或通过扩展接口适配新设备、新功能,加速工业自动化项目的落地效率。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 31
31 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)