python程序启动ros节点rospy.init_node卡住
由于python代码要同时用到pytorch和ros,因此需要在conda环境里面运行python程序。但是终端运行时,在运行到rospy.init_node时,程序会卡住,不会报错,但是后面的代码不会执行,一直卡住没反应。1.在setting里面点击下拉菜单,点击Python Interpreter的下拉菜单选择“Show All”后面在pycharm里面运行时解决了该问题,不过需要要rospy
·
由于python代码要同时用到pytorch和ros,因此需要在conda环境里面运行python程序。但是终端运行时,在运行到rospy.init_node时,程序会卡住,不会报错,但是后面的代码不会执行,一直卡住没反应。
后面在pycharm里面运行时解决了该问题,不过需要要rospy的路径配置到pycharm里。具体见下图:
1.在setting里面点击下拉菜单,点击Python Interpreter的下拉菜单选择“Show All”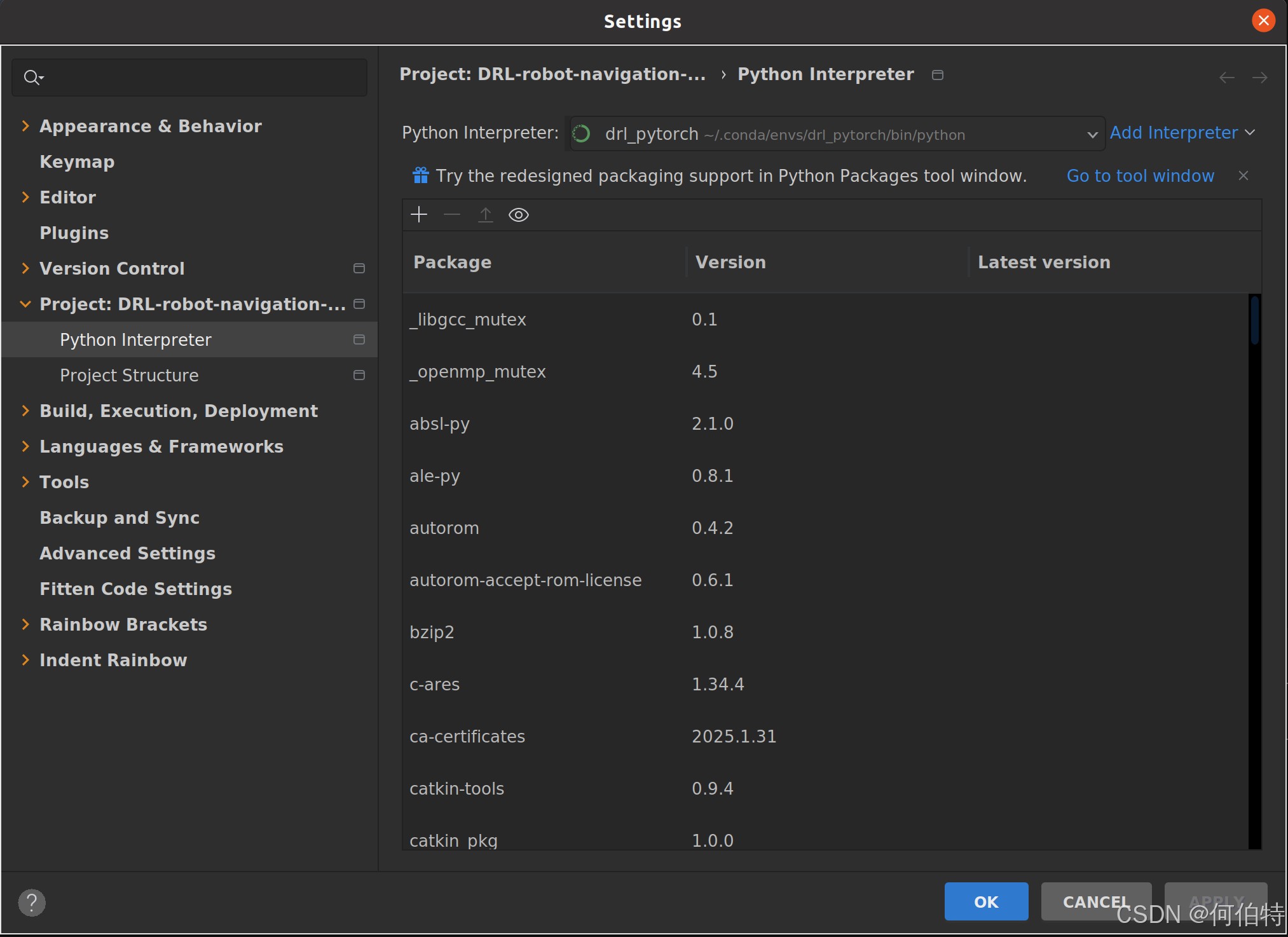
2.在弹出来的窗口中,点击左侧小图标(Show Interpreter Paths),将ros中python相关库文件路径(“/opt/ros/noetic/lib/python3/dist-packages”)添加进行: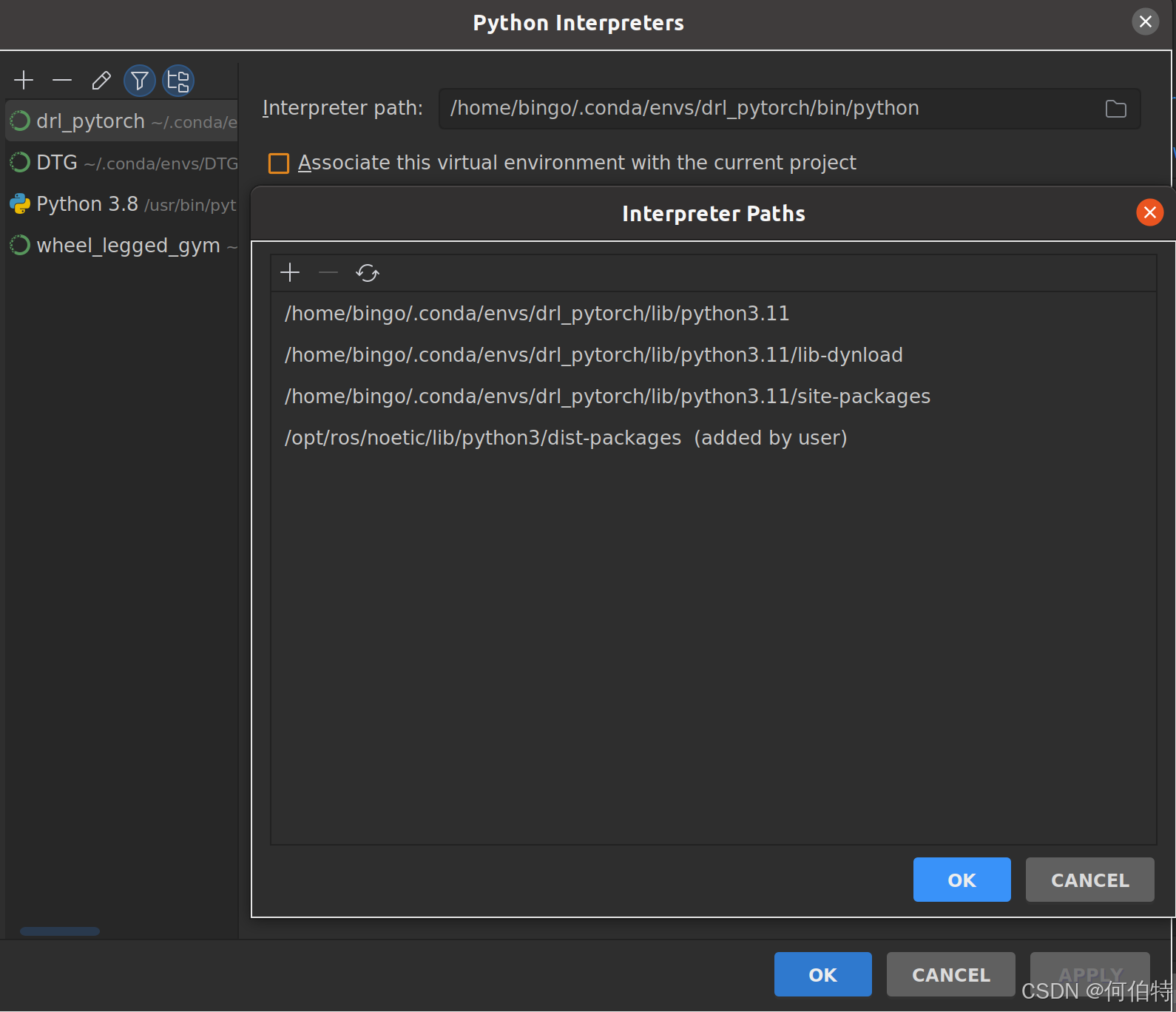
完成上述操作后,在Pycharm中即可运行代码正常启动ros节点。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)