无人机覆盖搜索路径规划:探索未知,锁定目标
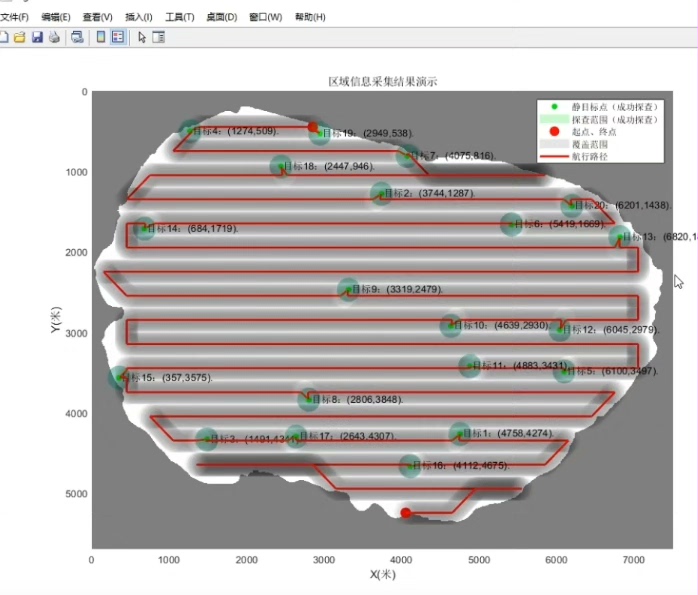
无人机覆盖搜索路径规划无人机搜索目标路径规划无人机侦查路径规划对未知区域进行覆盖搜索,并且寻找目标matlab代码有详细注释,可快速上手。在现代科技领域,无人机的应用愈发广泛,其中覆盖搜索与目标寻找的路径规划任务极为关键。无论是在灾难救援中寻找幸存者,还是在广袤区域执行侦查任务,高效的路径规划都能让无人机发挥最大效能。
无人机覆盖搜索路径规划 无人机搜索目标路径规划 无人机侦查路径规划 对未知区域进行覆盖搜索,并且寻找目标 matlab代码有详细注释,可快速上手。
在现代科技领域,无人机的应用愈发广泛,其中覆盖搜索与目标寻找的路径规划任务极为关键。无论是在灾难救援中寻找幸存者,还是在广袤区域执行侦查任务,高效的路径规划都能让无人机发挥最大效能。
探索未知区域:覆盖搜索
对未知区域进行覆盖搜索,就好比我们手持一张白纸,要规划出一条走遍整张纸每个角落的路线。其核心在于保证无人机能遍历给定区域,不遗漏任何部分。
简单示例代码(Matlab)
% 定义区域边界
x_min = 0;
x_max = 100;
y_min = 0;
y_max = 100;
% 生成网格点,代表要覆盖的区域
[x_grid, y_grid] = meshgrid(x_min:1:x_max, y_min:1:y_max);
% 初始化路径点数组
path_x = [];
path_y = [];
% 按照行优先遍历网格点,模拟无人机路径
for i = 1:size(x_grid, 1)
for j = 1:size(x_grid, 2)
path_x = [path_x, x_grid(i, j)];
path_y = [path_y, y_grid(i, j)];
end
end代码分析
- 首先,我们定义了要搜索区域的边界
xmin、xmax、ymin、ymax,这里简单设置为一个100x100的正方形区域。 - 利用
meshgrid函数生成网格点,这些点就代表了我们要覆盖的区域中的各个位置。 - 接着初始化两个数组
pathx和pathy,用来存储无人机飞行路径上的点的横纵坐标。 - 通过两层循环,按照行优先的顺序遍历网格点,并将这些点的坐标依次添加到
pathx和pathy数组中,这样就模拟出了一条覆盖整个区域的路径。
寻找目标:侦查路径规划
在覆盖搜索的基础上,我们还需要无人机能够在搜索过程中寻找特定目标。这就需要给无人机添加一些“智能”,让它能判断是否发现目标,并据此调整路径。
扩展代码(Matlab)
% 假设目标位置
target_x = 50;
target_y = 50;
% 遍历路径点,模拟搜索目标
for k = 1:length(path_x)
current_x = path_x(k);
current_y = path_y(k);
% 计算当前位置与目标位置的距离
distance = sqrt((current_x - target_x)^2 + (current_y - target_y)^2);
if distance < 5 % 假设距离小于5认为发现目标
disp('目标已发现!');
break;
end
end代码分析
- 我们假设了目标的位置
targetx和targety,实际应用中这可能需要通过传感器数据来确定。 - 在遍历之前生成的路径点过程中,对于每个当前位置,计算它与目标位置的距离。
- 如果距离小于设定的阈值(这里设为5),就认为无人机发现了目标,打印出“目标已发现!”并停止遍历,因为已经完成了寻找目标的任务。
通过上述的代码示例和分析,大家应该对无人机覆盖搜索路径规划以及目标寻找的过程有了一定了解。Matlab提供了强大且易于上手的工具来实现这些功能,希望大家能在此基础上进一步优化和拓展,让无人机在实际应用中发挥更大的作用。无论是应对复杂地形还是多变的任务需求,合理的路径规划永远是无人机高效执行任务的关键。
无人机覆盖搜索路径规划 无人机搜索目标路径规划 无人机侦查路径规划 对未知区域进行覆盖搜索,并且寻找目标 matlab代码有详细注释,可快速上手。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)