ubuntu20.04.06_ROS1安装流程记录
本文详细介绍了在Ubuntu 20.04系统上安装机器人操作系统ROS(Noetic版本)的步骤及所遇到问题的解决方案。
前言
本文章基于机器人操作系统ROS的安装心得以及rosdep问题的处理_哔哩哔哩_bilibili安装教程记录本人安装过程及遇到的问题和解决方案。为了后续方便从Windows复制代码到ubuntu,首先安装一个工具实现该功能,分别在终端输入这两行代码后再重启。
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools-desktop一. 导入ROS安装源
ros官网
www.ros.orgubuntu20.04对应的ros版本为Noetic,下载网址:noetic/Installation/Ubuntu - ROS Wiki,里面有安装流程介绍
1.进入下载网址点击黄色标识进入镜像源选择,选择第二个清华镜像源(选其他也可以)
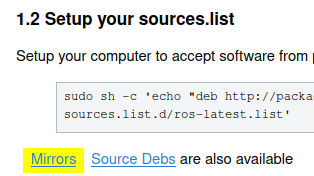

2.复制command代码,粘贴到终端回车
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'二. 设置安装秘钥
1.分别赋值下列两条指令到终端

sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -2.第二条指令可能会因为网络问题卡主不动,这时按Ctrl+C退出。
第一种方法:打开手机热点让电脑连接再次输入第二条指令 (亲测可行)
第二种方法:根据视频的方法操作输入下面的指令
sudo apt-key adv--keyserver hkp://keyserver.ubuntu.com:80 --recv-keyC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654成功后会返回OK字样,都不行就百度或问问ai吧

三. 下载安装ROS
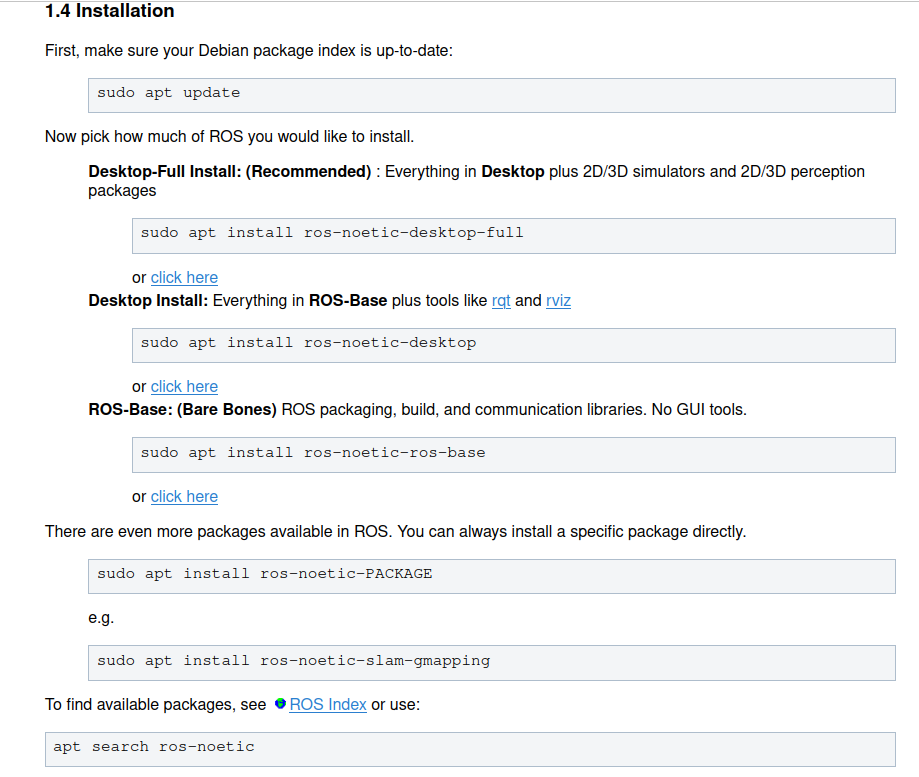
1.更新索引列表
sudo apt update2.安装ros主体部分,网速慢的话可以去开一局铲铲了
sudo apt install ros-noetic-desktop-full四. 环境参数设置
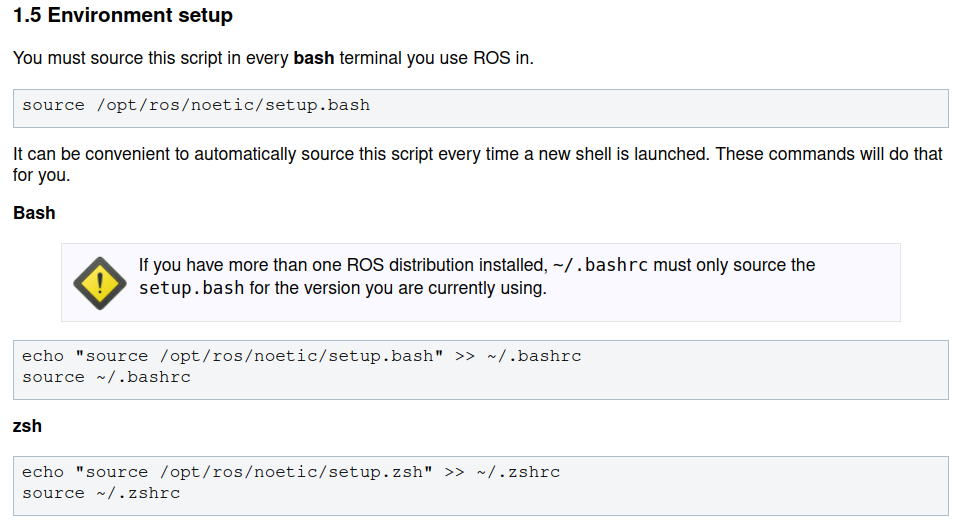
1.分别复制下列代码到终端
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
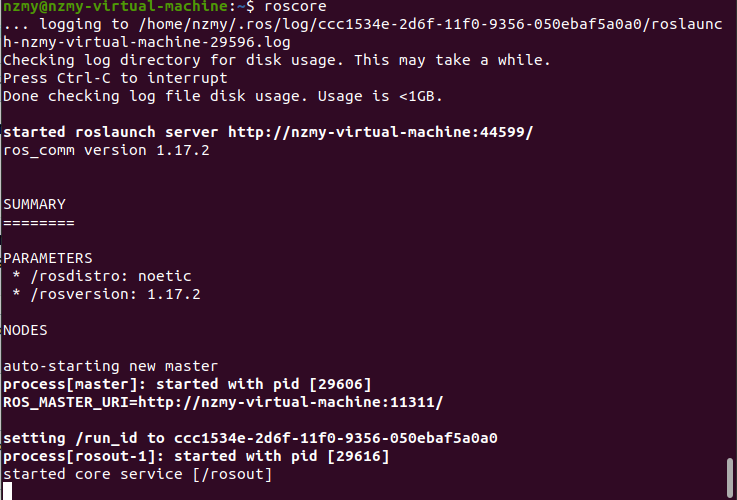
roscore显示下列信息就成功了
五. rosdep初始化
对ros的依赖包进行初始化,方便后续对第三方扩展软件包进行安装
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential下列两句代码对网络要求高,运行成功如图所示。如果不行就试试手机热点或者按照视频的方法
视频方法:1.先分别输入下列三条指令,将rosdep资源文件配置从国外地址转为国内 2.再输入后面的指令进行配置
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdepsudo rosdep init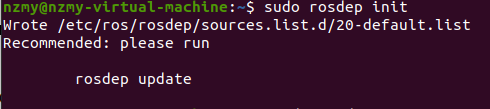
rosdep update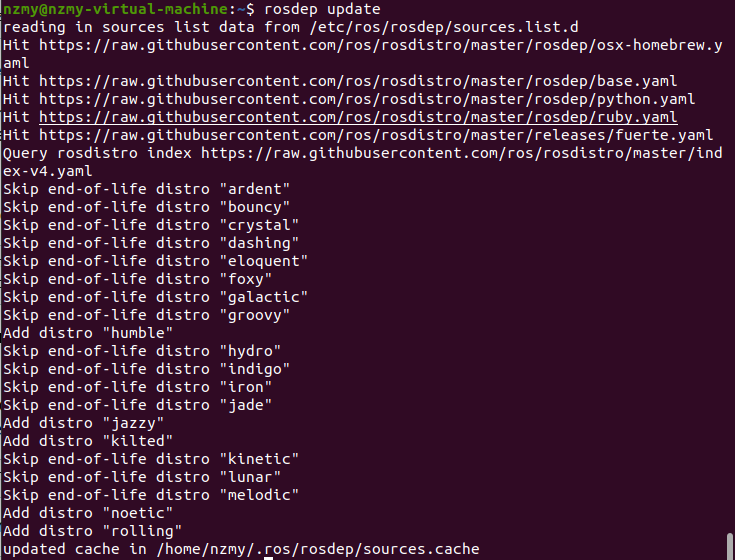
六. ROS软件包资源网站
index.ros.org

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)