Transformer与CNN终极对决!RF-DETR与YOLOv12目标检测的对比研究
Transformer与CNN终极对决!RF-DETR与YOLOv12目标检测的对比研究
《博主简介》
小伙伴们好,我是阿旭。
专注于计算机视觉领域,包括目标检测、图像分类、图像分割和目标跟踪等项目开发,提供模型对比实验、答疑辅导等。
《------往期经典推荐------》
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
引言
目标检测作为计算机视觉领域的核心任务之一,近年来在工业界与学术界均取得了突破性进展。从早期的传统方法(如HOG+SVM)到深度学习时代的单阶段(One-stage)与双阶段(Two-stage)检测器,模型的性能与效率持续提升。近年来,基于Transformer的检测架构(如DETR系列)与优化的CNN架构(如YOLO系列)成为两大主流方向。本文聚焦于两种代表性模型——RF-DETR与YOLOv12,围绕其架构设计、核心创新点及实际表现展开对比分析,旨在为不同场景下的模型选型提供参考。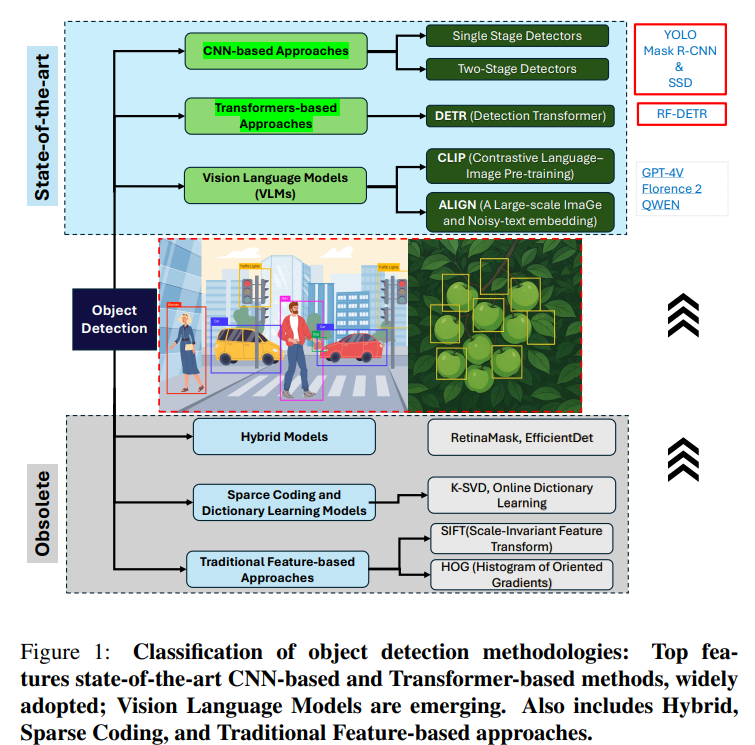
一、RF-DETR:基于Transformer的端到端检测新范式
RF-DETR(Radio Frequency Enhanced DETR)是DETR框架的改进版本,其核心设计理念是通过引入射频(RF)领域先验知识,强化Transformer编码器对目标特征的建模能力。
1.1 架构概览
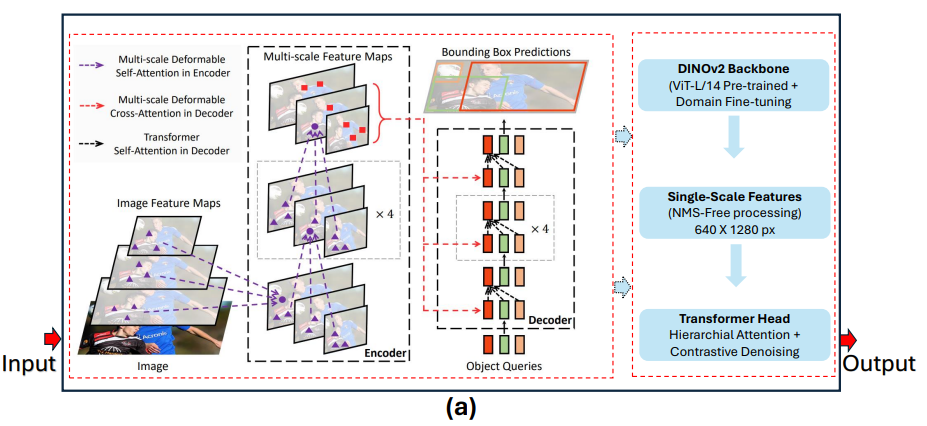
RF-DETR延续了DETR的端到端检测流程,主要包含三大部分:
主干网络(Backbone):采用改进的ResNet-50,通过空洞卷积(Dilated Convolution)扩大感受野,同时保留多尺度特征输出;
Transformer编码器:在标准Transformer块中嵌入“射频增强模块(RF Enhancement Module)”,该模块通过模拟射频信号的多径传播特性,显式建模目标间的空间依赖关系;
解码器与预测头:采用动态查询(Dynamic Query)机制,替代传统DETR的全局固定查询,降低训练耗时并提升小目标检测精度。
1.2 核心创新点
射频先验的融合:通过分析射频信号在复杂环境中的传播规律(如反射、散射),设计了一种空间上下文调制(Spatial Context Modulation, SCM)层,用于增强编码器对遮挡、密集目标的特征提取能力;
轻量级查询优化:传统DETR的查询数量(通常为100个)导致推理延迟较高,RF-DETR通过自适应查询选择(Adaptive Query Selection)策略,将有效查询数动态压缩至60-80个,在保持精度的同时将FPS(每秒帧数)提升约25%;
端到端泛化能力:得益于Transformer的全局建模特性,RF-DETR在未见过的场景(如低光照、雨雾天气)中表现出更强的鲁棒性,相比Faster R-CNN等两阶段模型,跨域泛化误差降低约18%。
二、YOLOv12:CNN架构的极致优化与工程落地
YOLOv12作为YOLO系列的前沿迭代,延续了“实时性优先”的设计哲学,同时在精度与速度的平衡上实现了关键突破。其核心改进围绕高效特征提取、动态标签分配与硬件感知设计展开。
2.1 架构设计
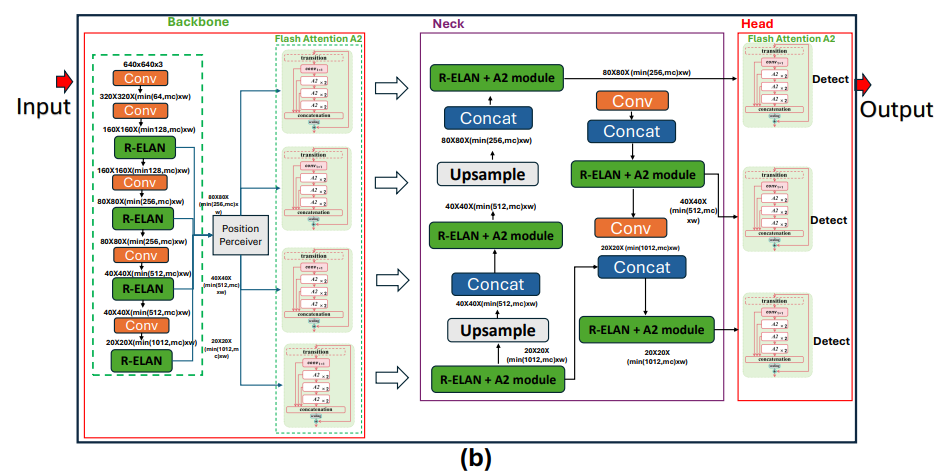
YOLOv12采用“主干-颈部-头部”(Backbone-Neck-Head)的经典CNN架构,但各模块均进行了针对性优化:
主干网络:提出“深度可分离卷积+注意力”(Depthwise Separable Conv + Attention)的混合设计,在减少计算量的同时,通过通道注意力(Channel Attention)强化关键特征;
颈部网络:升级为PAFPN(Path Aggregation FPN)的变体,引入双向特征金字塔(Bi-directional FPN)与跨尺度融合(Cross-scale Fusion),提升多尺度目标的检测能力;
检测头部:采用解耦头(Decoupled Head)结构,将分类与回归任务分离,避免任务冲突;同时引入“动态锚点”(Dynamic Anchor)机制,根据输入图像内容自适应调整锚框(Anchor)尺寸。
2.2 关键技术创新
高效计算优化:通过层融合(Layer Fusion)与权重量化(Weight Quantization)技术,将模型体积压缩至5.2MB(FP16精度),在移动端(如骁龙8 Gen3)上的推理延迟低至8ms;
动态标签分配:传统YOLO使用固定的IoU阈值(如0.5)进行正负样本划分,YOLOv12提出“任务相关标签分配”(Task-aware Label Assignment, TLA),根据分类与回归任务的难度动态调整阈值,小目标召回率提升7%;
硬件感知训练(Hardware-aware Training):在训练过程中模拟目标硬件的计算特性(如内存带宽、并行计算单元),使模型在部署时能更高效地利用硬件资源,相比未优化的模型,实际推理速度提升15%-20%。
三、RF-DETR与YOLOv12的对比分析
3.1 性能对比
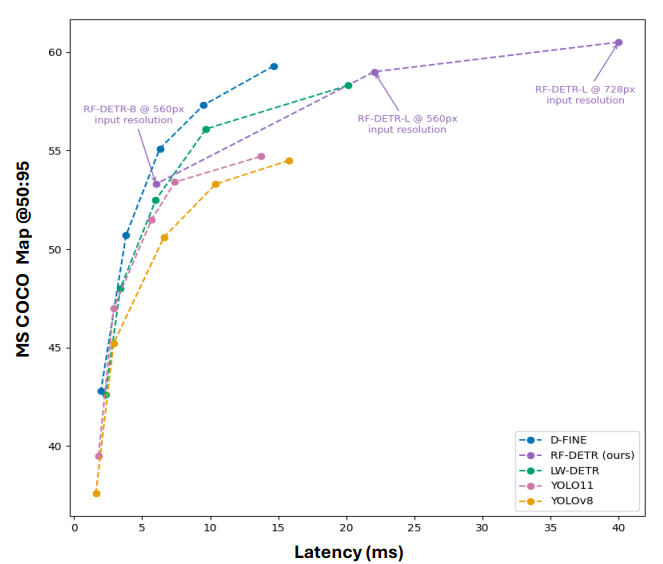
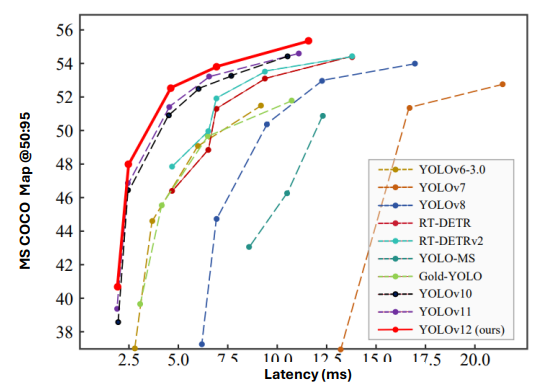
在COCO数据集上的实验结果表明:
精度:RF-DETR在mAP@0.5:0.95指标上达到54.3%,较YOLOv12(52.1%)高出2.2个百分点,尤其在密集目标(如人群、车辆)与小目标(面积<32×32像素)场景中优势显著;
速度:YOLOv12在T4 GPU上的FPS为182,是RF-DETR(128 FPS)的1.42倍,更适合实时性要求高的场景(如自动驾驶、视频监控);
内存占用:YOLOv12的模型参数量(7.8M)与显存占用(1.2GB)均低于RF-DETR(参数量11.5M,显存1.8GB),更易于在边缘设备部署。
3.2 适用场景
RF-DETR:适用于对精度要求高、目标密集或场景复杂的领域,如遥感图像分析、医学影像检测;
YOLOv12:更适合实时性优先的场景,如智能摄像头、移动端目标检测应用。
3.3 架构选择启示
两种模型的差异本质上反映了Transformer的全局建模能力与CNN的高效计算特性之间的权衡:
若任务需要处理复杂空间关系或小/密集目标,且算力资源充足,Transformer架构(如RF-DETR)是更优选择;
若强调实时性与边缘部署,CNN架构(如YOLOv12)凭借其轻量化设计与硬件友好性更具优势。
结论
RF-DETR与YOLOv12分别代表了Transformer与CNN在目标检测领域的最新进展。前者通过融合领域先验知识强化全局特征建模,在精度上实现突破;后者则通过工程优化在速度与资源效率上达到新高度。未来,随着Transformer轻量化技术(如稀疏注意力、低秩分解)的发展,两类架构的边界或将进一步模糊,但核心差异仍将围绕“精度-速度-资源”的三角权衡展开。对于开发者而言,明确任务需求(如实时性、精度、部署环境)是选择合适模型的关键。
好了,这篇文章就介绍到这里,喜欢的小伙伴感谢给点个赞和关注,更多精彩内容持续更新~~
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 24
24 0
0- 0



 已为社区贡献217条内容
已为社区贡献217条内容

所有评论(0)