matlab分析gnss数据,Matlab读取GNSS 观测值o文件代码示例
一、准备工作
观测值数据读取是进行数据处理的前提,通常,观测值的数据格式有rtcm、ubx、rinex,各家厂商还有自定义的格式。数据读取是最简单的工作,掌握了数据组织格式即掌握了数据读取策略,简言之,我们是对字符串进行一系列操作。我认为对o文件读取要做以下准备工作,分别是:
(1)安装Matlab的PC;
(2) 学习rinex.pdf资料;
(3)o文件准备;
(4)伪代码编写,理清数据流;
(5)代码测试
我们在使用定位方法SPP/PPP/RTK时,是按照历元来读取卫星的观测值(PR/CP),Doppler,SNR等信息,后续的处理是对所有卫星数进行循环遍历,进行不同的操作。
二、需解决的问题
问题是:要实现使用Matlab绘制不同卫星系统的卫星在观测弧段的伪距观测值时序图。
在上述问题分析中,易知卫星PRN号是唯一的,可作为key;而卫星对应着观测值(PC/CP/Doppler),可作为value。换言之,key和value可以使用map的映射来作为数据结构,其中,value可以使用结构体保存。最重要的一环已经确定了,即使用map和struct。
接下来,我们拿一颗卫星的观测弧段内的伪距值来说,可能的情况有以下几种:
(1) 在观测弧段内,卫星一直被捕获,即100%存在伪距值;
(2) 在观测弧段内,卫星在开始历元没有被捕获,而后才被捕获;
(3)在(2)中还存在未捕获,捕获,未捕获,捕获等情况;
在未捕获的历元时观测值为0,同时,我们还要注意,有伪距不一定有载波,没有载波肯定没有伪距。我们的伪代码主要是对上述三种情况进行判断即可。
三、代码实现
具体问题具体分析,解决上述提到的问题,具体代码如下:
% function: read the body of rinex obs file
clear all
close all
clc
fid=fopen(' example.obs');
if fid==-1
disp('fail to open obs file!');
end
% 创建结构体obs,使用Map进行映射,prn为键(char),sv为值(table)
obs=containers.Map;
record_counter=0;
% 读取body记录
while feof(fid)==0
line=fgets(fid);
if strcmp(line(1),'>')
sv_sum=str2double(line(34:35));
time=line(3:29);
if sv_sum>0
for i=1:sv_sum
line=fgets(fid);
% 键 -> prn
key=line(1:3);
% 值 -> sv(pr cp dop)
sv.pr=str2double(line(6:17));
cp=line(21:33);
if isnan(cp)
sv.cp=0;
else
sv.cp=str2double(line(21:33));
end
sv.dop=str2double(line(41:49));
% 值逻辑判断
if isKey(obs,key)
jump_sec=record_counter-length(obs(key));
if jump_sec~=0 % 解决掉星后重新锁定的问题
temp.pr=0;
temp.cp=0;
temp.dop=0;
tmp_strcut=repmat(temp,1,jump_sec);
value=[obs(key) tmp_strcut sv];
else % 卫星一直锁定,直接追加
if strcmp(key,'C18')==1
if length(obs(key))>5713
disp(time);
end
end
value=[repmat(obs(key),1) repmat(sv,1)]; % mark
end
else % 卫星首次锁定
if record_counter~=0 % 第一秒未锁定
temp.pr=0;
temp.cp=0;
temp.dop=0;
tmp_strcut=repmat(temp,1,record_counter);
value=[tmp_strcut sv];
else % 第一秒锁定
value=sv;
end
end
obs(key)=value;
end
end
record_counter=record_counter+1;
end
end
disp('create struct obs(body) successfully!');
% 绘图
sv_sum=obs.Count; % 可视卫星数量
keySet=keys(obs); % 可视卫星名称
disp(keySet);
v=299792458.0;
bf1=1.561098E9; % bds L1 频率
gf1=1.57542E9; % gps L1 频率
gps_sum=0;bds_sum=0;
for i=1:sv_sum
prn=char(keySet(i));
if strcmp(prn(1),'G')==1 % GPS
gps_sum=gps_sum+1;
else if strcmp(prn(1),'C')==1 % BDS
bds_sum=bds_sum+1;
end
end
end
subfig1=ceil(sqrt(bds_sum));
subfig2=ceil(sqrt(gps_sum));
x=1:record_counter;
for i=1:sv_sum
prn=char(keySet(i));
info=obs(prn);
pr=zeros(1,record_counter);cp=pr;
for j=1:length(info)
pr(j)=info(j).pr;
cp(j)=info(j).cp;
end
if i==1 || i==bds_sum+1
figure;
end
subplot(n,n,pos);
plot(x,pr,'r',x,cp*f,'g');
title(char(prn));
end
四、示例结果
我只针对工作中遇到的rinex版本数据进行处理,gps/bds双系统,单频数据,结果图如下:
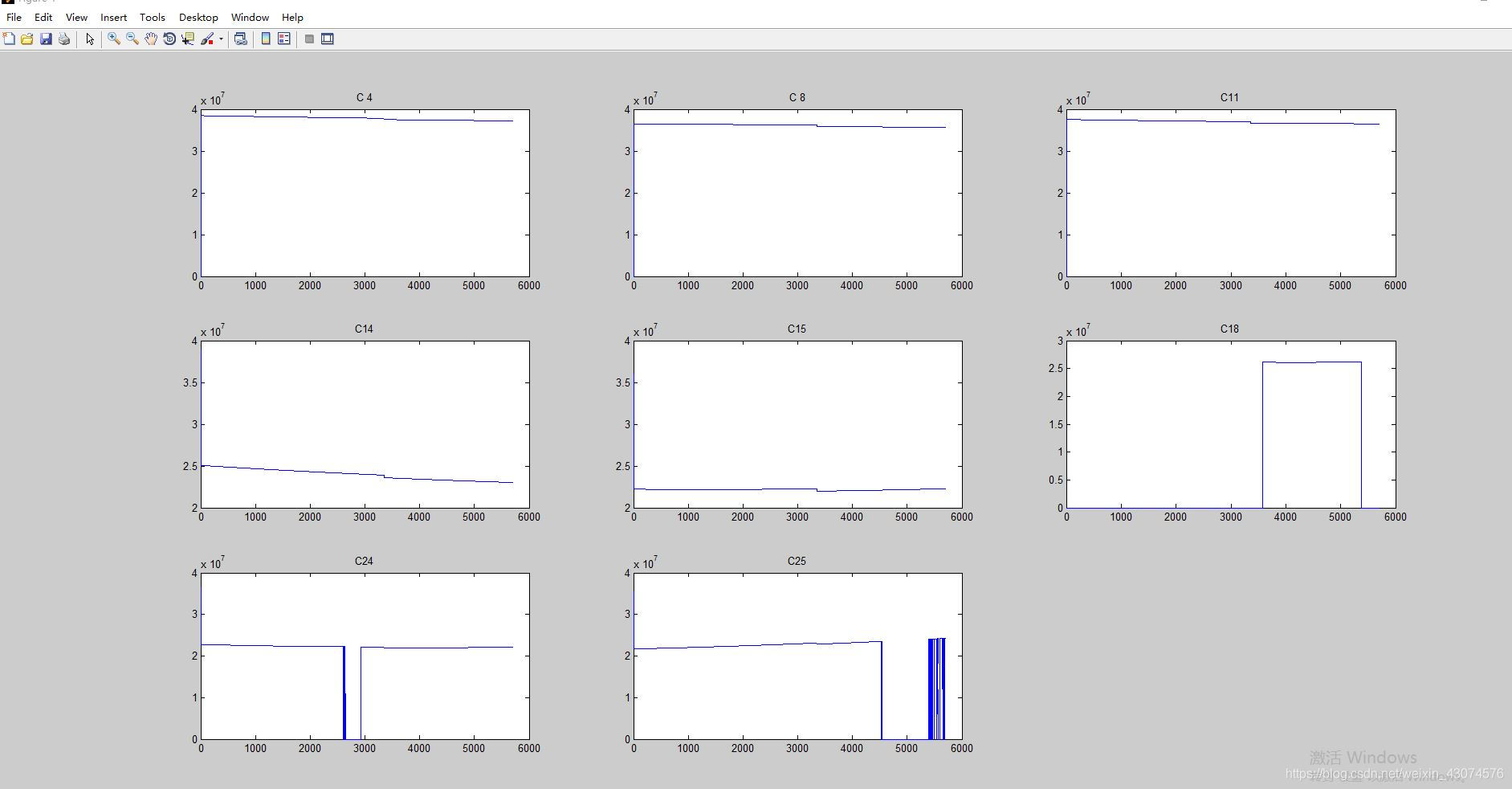
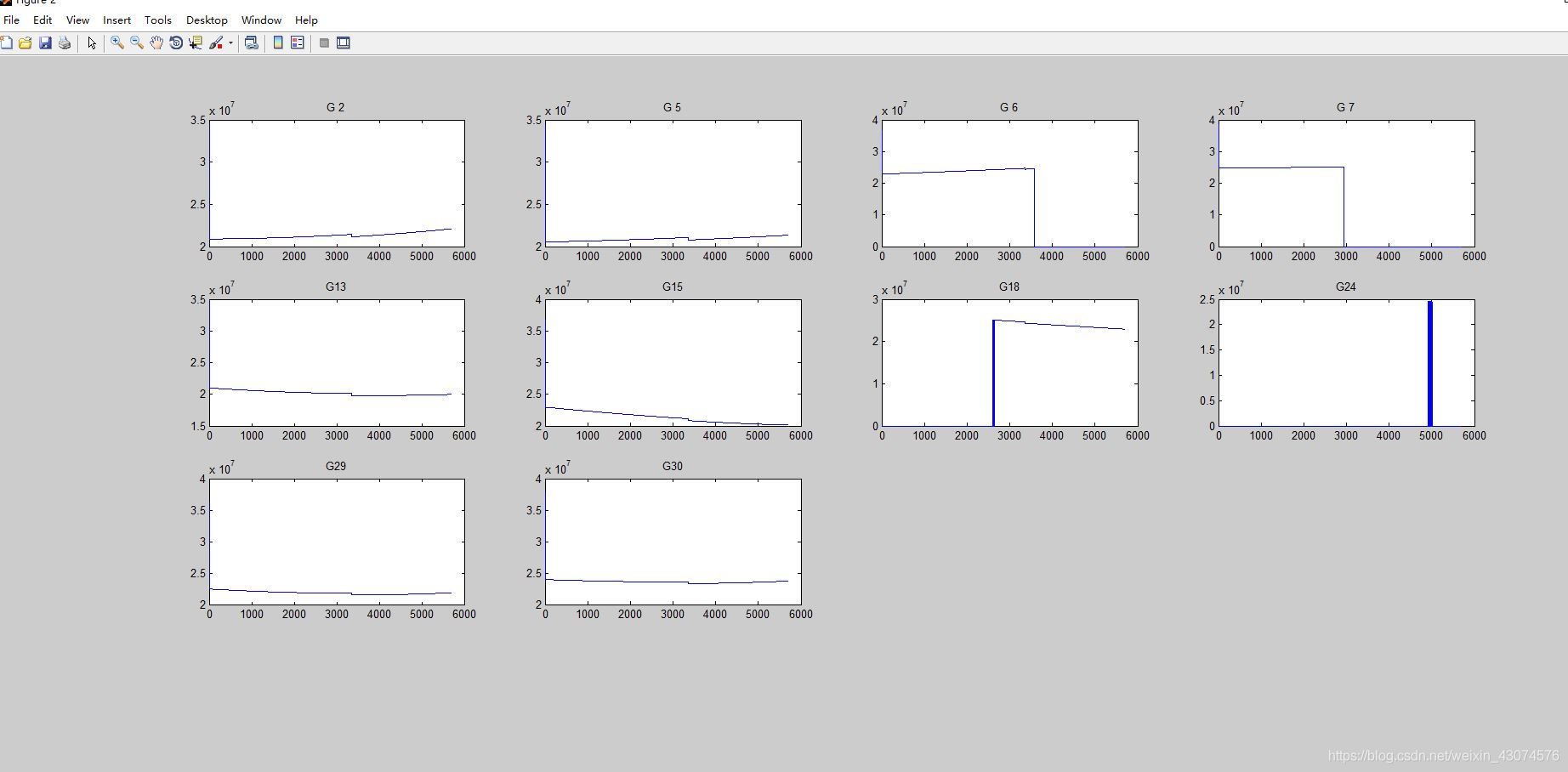
示例代码比较简单,也有相应的注释。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)