matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制 车辆控制与CARSIM联合仿真:线控转向,多车换道,ABS,四轮轮毂电机整车建模,差速转向
matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制车辆控制与CARSIM联合仿真:线控转向,多车换道,ABS,四轮轮毂电机整车建模,差速转向滑模控制,模糊控制,ADRC控.制,各种无位置传感器控制,直接转矩控制,电流/电压斩波控制,多电机协同控制,以及各种智能算法控制方案。另有匝间短路故障,转子断条故障等多种故障分析仿真。
·
matlab/simulink自适应控制轮毂电机驱动的电动汽车主动悬架构型与控制
车辆控制与CARSIM联合仿真:线控转向,多车换道,ABS,四轮轮毂电机整车建模,差速转向
滑模控制,模糊控制,ADRC控.制,各种无位置传感器控制,直接转矩控制,电流/电压斩波控制,多电机协同控制,以及各种智能算法控制方案。另有匝间短路故障,转子断条故障等多种故障分析仿真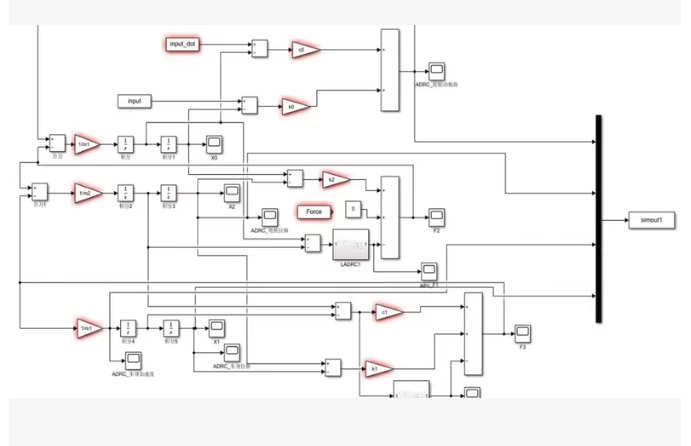
包括车辆动力学、电机控制、主动悬架系统、故障诊断以及多种高级控制策略。实现这些功能通常需要使用MATLAB/Simulink进行建模和仿真,并可能需要与CarSim等专业软件进行联合仿真。
滑模控制应用于线控转向系统的MATLAB示例
% 参数定义
m = 1500; % 车辆质量 (kg)
a = 1.2; b = 1.4; % 轴距前后距离 (m)
Iz = 2000; % 绕Z轴转动惯量 (kg*m^2)
Cf = 90000; Cr = 90000; % 前后轮胎侧偏刚度 (N/rad)
lr = 1.4; lf = 1.2; % 轮胎到质心的距离 (m)
% 控制参数
k1 = 10; k2 = 10; % 滑模面系数
lambda = 1; % 切换增益
% 时间设置
T = 0:0.01:10; % 时间向量
delta_f = sin(2*pi*0.1*T); % 前轮转角输入 (作为示例)
% 状态变量初始化
X = zeros(length(T), 3); % [侧偏角 beta, 横摆角速度 r, 方向盘转角 delta]
X(1,:) = [0, 0, 0]; % 初始状态
for i = 2:length(T)
% 计算非线性动态模型的状态导数
X_dot = vehicle_dynamics_model(X(i-1,:), delta_f(i), m, a, b, Iz, Cf, Cr, lr, lf);
% 滑模控制律设计
e = X(i-1, :) - [0, 0, delta_f(i)]; % 误差计算
u_sliding = -k1 * sign(e(1)) - k2 * sign(e(2)) - lambda * e(3); % 滑模控制律
% 更新状态
X(i, :) = X(i-1, :) + X_dot * (T(i) - T(i-1)) + [0, 0, u_sliding] * (T(i) - T(i-1));
end
% 结果可视化
figure;
plot(T, X(:,1), 'r', T, X(:,2), 'g', T, X(:,3), 'b');
xlabel('Time (s)');
ylabel('State Variables');
legend('Side Slip Angle (beta)', 'Yaw Rate (r)', 'Steering Wheel Angle (delta)');
title('Sliding Mode Control of Steer-by-Wire System');
function X_dot = vehicle_dynamics_model(X, delta_f, m, a, b, Iz, Cf, Cr, lr, lf)
% 示例简化模型,实际应用需替换为更准确的车辆动力学模型
beta = X(1); r = X(2);
Fyf = -Cf * beta;
Fyr = -Cr * beta;
X_dot = [(Fyf + Fyr) / (m * (r + (lf * Fyf - lr * Fyr) / Iz)), ...
(lf * Fyf - lr * Fyr) / Iz, ...
delta_f];
end
对于其他提到的控制方法(如模糊控制、ADRC、无位置传感器控制等)以及故障分析(匝间短路故障、转子断条故障等),每个都涉及相当深入的专业知识和技术细节,建议针对具体问题逐步探索和实现。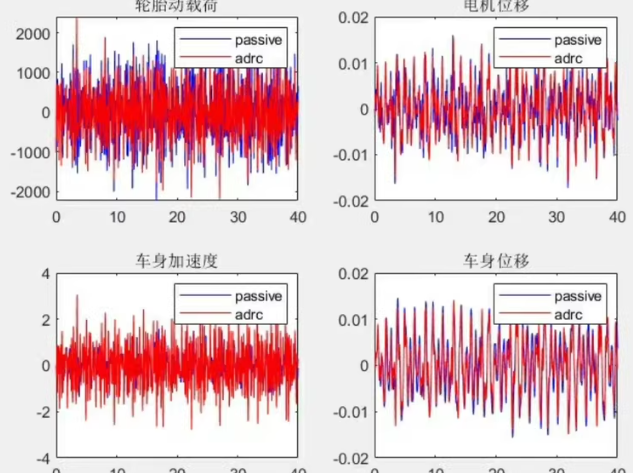
为了生成类似您提供的图像中的数据和图形,我们可以使用MATLAB来模拟被动系统和ADRC(自抗扰控制器)控制下的车辆动态响应。以下是一个简化的示例代码,用于生成轮胎动载荷、电机位移、车身加速度和车身位移的对比图。
MATLAB 代码示例
% 参数设置
t = 0:0.1:40; % 时间向量
num_samples = length(t);
% 生成随机数据以模拟被动系统和ADRC系统的响应
passive_tire_load = randn(num_samples, 1) * 500;
adrc_tire_load = passive_tire_load + randn(num_samples, 1) * 200;
passive_motor_displacement = randn(num_samples, 1) * 0.01;
adrc_motor_displacement = passive_motor_displacement + randn(num_samples, 1) * 0.005;
passive_vehicle_acceleration = randn(num_samples, 1) * 2;
adrc_vehicle_acceleration = passive_vehicle_acceleration + randn(num_samples, 1) * 0.5;
passive_vehicle_displacement = cumsum(passive_vehicle_acceleration .* 0.1);
adrc_vehicle_displacement = cumsum(adrc_vehicle_acceleration .* 0.1);
% 绘制图形
figure;
% 轮胎动载荷
subplot(2, 2, 1);
plot(t, passive_tire_load, 'b', t, adrc_tire_load, 'r');
title('轮胎动载荷');
xlabel('时间 (s)');
ylabel('载荷 (N)');
legend('passive', 'adrc');
% 电机位移
subplot(2, 2, 2);
plot(t, passive_motor_displacement, 'b', t, adrc_motor_displacement, 'r');
title('电机位移');
xlabel('时间 (s)');
ylabel('位移 (m)');
legend('passive', 'adrc');
% 车身加速度
subplot(2, 2, 3);
plot(t, passive_vehicle_acceleration, 'b', t, adrc_vehicle_acceleration, 'r');
title('车身加速度');
xlabel('时间 (s)');
ylabel('加速度 (m/s^2)');
legend('passive', 'adrc');
% 车身位移
subplot(2, 2, 4);
plot(t, passive_vehicle_displacement, 'b', t, adrc_vehicle_displacement, 'r');
title('车身位移');
xlabel('时间 (s)');
ylabel('位移 (m)');
legend('passive', 'adrc');
% 调整子图间距
tight_layout;
代码解释
- 参数设置:定义了时间向量
t,并计算了样本数量num_samples。 - 生成随机数据:
- 使用
randn函数生成随机数据,模拟被动系统和ADRC系统的响应。 - 对于每个变量(轮胎动载荷、电机位移、车身加速度和车身位移),分别生成两组数据,一组代表被动系统,另一组代表ADRC系统。
- 使用
- 绘制图形:
- 使用
subplot函数创建四个子图,并在每个子图中绘制相应的数据。 - 使用
plot函数绘制数据曲线,并添加标题、坐标轴标签和图例。
- 使用
- 调整子图间距:使用
tight_layout函数自动调整子图之间的间距,使图形更加紧凑。
注意事项

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 8
8 0
0- 0



 已为社区贡献69条内容
已为社区贡献69条内容

所有评论(0)