基于机器视觉的钢筋自动冲压项目方案
开发一套基于机器视觉和伺服电机的自动化冲压系统,实现钢筋自动识别、路径规划和精准冲压。钢筋轮廓识别算法,使用算法计算出钢筋轮廓的中心线。高度标定,确定相机镜头与冲压面的垂直高度。有需要视觉部分代码的小伙伴,可以联系我。有需要视觉部分代码的小伙伴,可以联系我。冲压点生成算法,在中心上标出每个冲压点。:相机拍照,识别钢筋轮廓和工件位置。:伺服电机按规划路径运动并执行冲压。第一阶段:相机标定与系统校准。
·
项目概述
项目背景
某机械加工厂目前采用人工方式将不规则钢筋冲压到工件铣槽内,存在以下问题:
异常处理流程
有需要视觉部分代码的小伙伴,可以联系我
- 工作繁琐,效率低下
- 操作危险性高,易发生工伤事故
- 产品质量一致性难以保证
- 人力成本持续上升

-
解决方案
开发一套基于机器视觉和伺服电机的自动化冲压系统,实现钢筋自动识别、路径规划和精准冲压。
技术实施方案
第一阶段:相机标定与系统校准
1.1 高度标定,确定相机镜头与冲压面的垂直高度
1.2 通过相机拍照计算出每个像素的实际长度
第二阶段:图像处理与路径规划
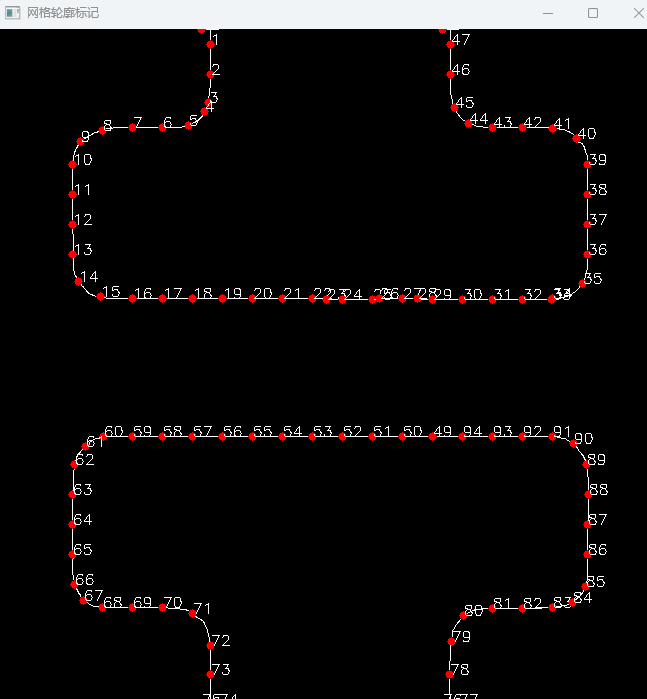
2.1 钢筋轮廓识别算法,使用算法计算出钢筋轮廓的中心线
2.2 冲压点生成算法,在中心上标出每个冲压点
-
第三阶段:运动控制与执行
3.1 伺服电机控制
3.2 安全监控与异常处理
系统工作流程
正常操作流程
- 上料阶段:操作员放置工件和钢筋
- 识别阶段:相机拍照,识别钢筋轮廓和工件位置
- 规划阶段:计算最优冲压路径和点位
- 执行阶段:伺服电机按规划路径运动并执行冲压
- 完成阶段:设备复位,准备下一次操作
- 视觉识别失败:重新拍照或人工干预
- 运动异常:立即停止并报警
- 冲压力异常:调整参数或检查硬件
- 安全触发:急停装置启动

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)