ubuntu20.04调试livox aiva驱动获取激光雷达数据
·
实验环境ubuntu20.04
平台包括本地x86平台
1.下载相关资料
下载包括:Livox Avia 用户手册中文.pdf、Livox_Viewer_For_Linux_Ubuntu16.04_x64_0.10.0(用于显示激光雷达数据)
以下链接进行下载
https://www.livoxtech.com/cn/avia/downloads
2.配置有线网络IP地址
(1)界面设置:将实验电脑的 IP 地址设置为:192.168.1.50,子网掩码设置为:255.255.255.0。
通上电源连接网线后
(2)命令设置
ifconfig 查看有线网卡的名称
实验电脑有线网卡的名称为enp49s0。
使用下面命令设置网卡的ip地址
sudo ifconfig enp49s0 192.168.1.50(3)验证是否联通
livox设备的IP 地址为 192.168.1.1XX (XX 为序列号最后两位数字 ,产品二维码下面最后两位数字)
查看是否联通,实验的livox的序列号最后两位数字为27,默认网关为 192.168.1.127。
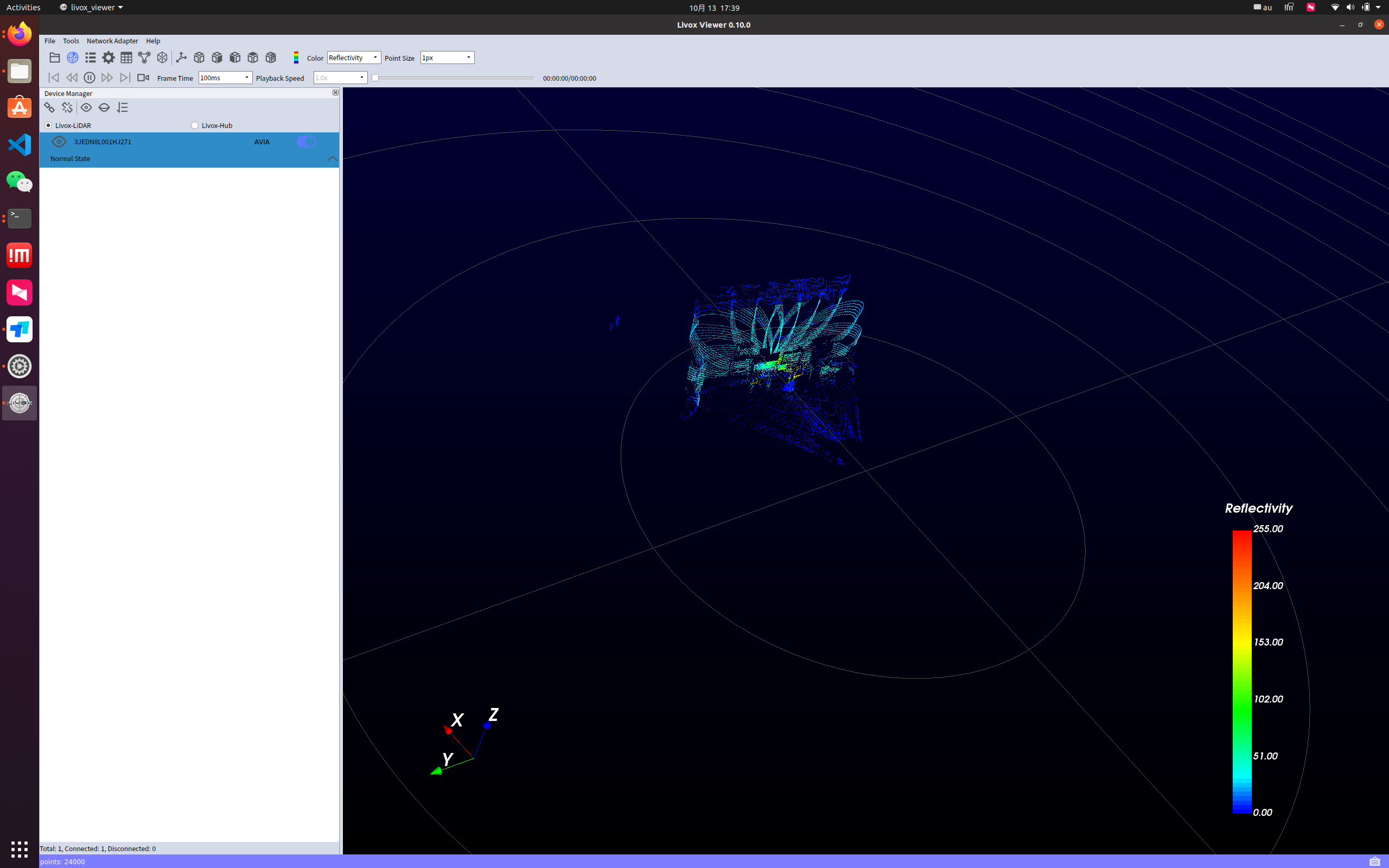
3.使用livox_viewer查看点云
解压官网下载的上位机软件
tar -zxvf Livox_Viewer_For_Linux_Ubuntu16.04_x64_0.10.0.tar.gz
cd Livox_Viewer_For_Linux_Ubuntu16.04_x64_0.10.0
./livox_viewer.sh
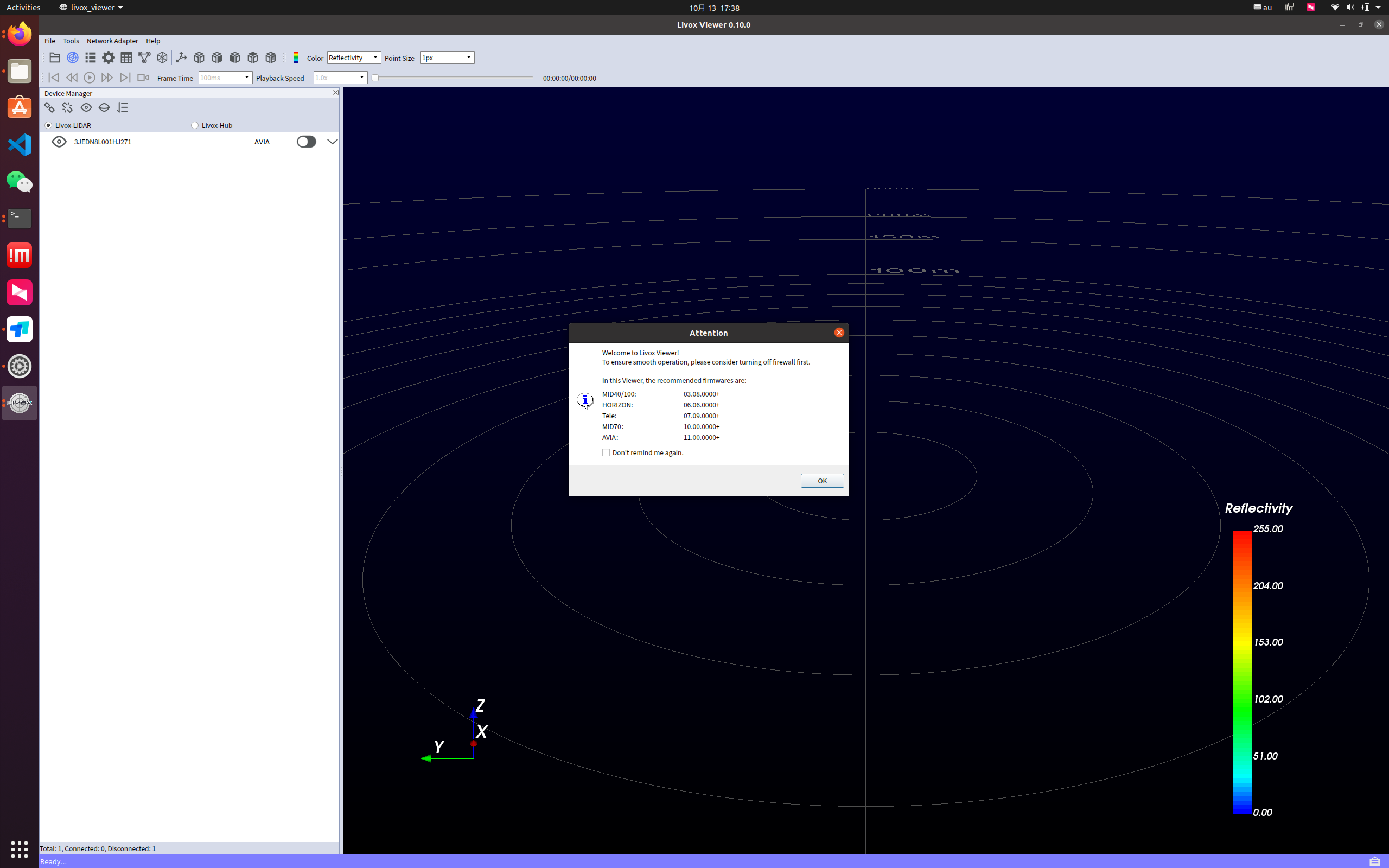
点击开关,并点击play按钮
4.安装sdk并使用ros显示点云
(1)安装Livox-SDK
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK/build/
cmake ..
make
sudo make install2)安装Livox-ros
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
cd ws_livox
catkin_make
source devel/setup.bash
roslaunch livox_ros_driver livox_lidar_rviz.launch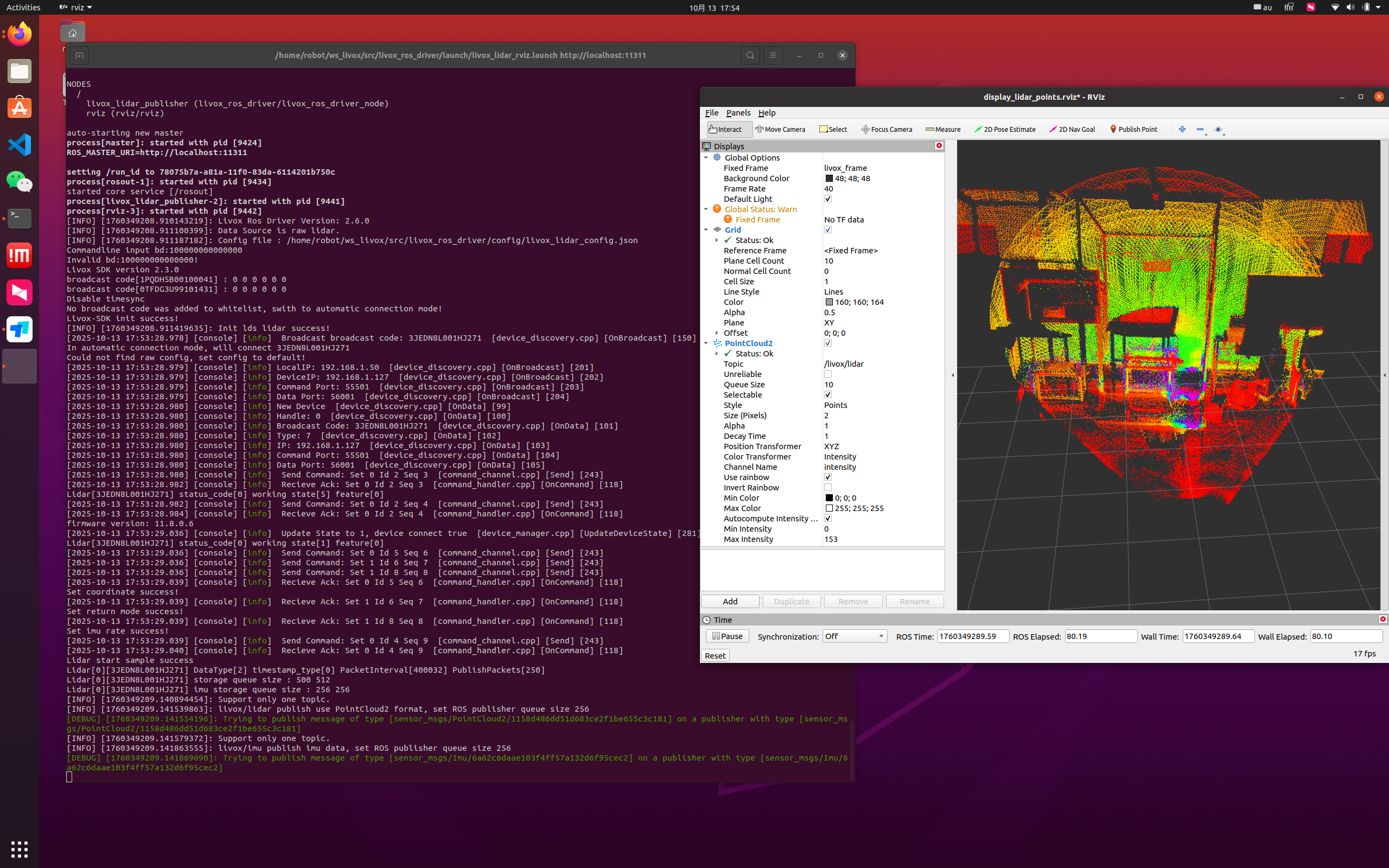

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)