读书志(1)机器人学:建模、控制与视觉 熊有伦 学习笔记
第一章 概述
1940年,Asimov在它的科学幻想小说《我是机器人》中,提出了机器人三原则:
(1)机器人不能伤害人类,页面不能坐视不管人类受到伤害
(2)机器人必须服从人类的命令,但不能违背(1)
(3)机器人必须保护自己,但不能违背(1)和(2)
机器人集合可以定义为它的三个子集之并:
{机器人}={操作臂}U{海陆空}U{人机共融}
TBM:就是隧道掘进机
AGV:自动导航车
机器人学是物质科学、信息科学和生命科学交叉融合的结果。
机动性(mobility)和操作性(manipulation)用于衡量机器人实现所要求的的运动功能和作业的能力。
自主驾驶难题:现代控制理论,如极大值原理、动态规划、卡曼滤波等理论
SLAM(simultaneous 同时 localization定位 and mapping建图)是机器人在未知环境试下寻位、建图、导航、运动规划的整体流程。
所谓深度学习,是指机器人模仿人脑构建神经网络,并通过收集信息、建立模型、解释数据,形成机器学习的功能,从而具备识别、分类、推理和预测能力。基于大数据的深度学习在智能驾驶研究中已取得显著进展。
谷歌公司正与牛津大学的两支人工智能研究小组合作,研制能够思考的类人机器人。研究领域包括:超快量子芯片,以模拟人类大脑;图像识别和语言理解能力;人工智能和机器学习;智能感知和推理;智能交互,以使机器人理解用户的想法和意图等。微软、谷歌、Facebook和苹果等公司都在大力开发人工智能。
VR:Virtual Reality AR(增强现实):Augmented(增广的;扩张的) Reality
第二章 机器人机构
运动副
运动副分为两类:低副和高副。两连杆之间通过面接触相对运动时,接触面的压强低,称为低副;若连杆之间通过线接触或者点接触相对运动,接触面的压强高,则称为高副。
低副分为六种:
旋转副,移动副,螺旋副,(1DOF)
圆柱副,(2DOF)
平面副和球面副(3DOF)。
串联机器人机构




并联机器人机构
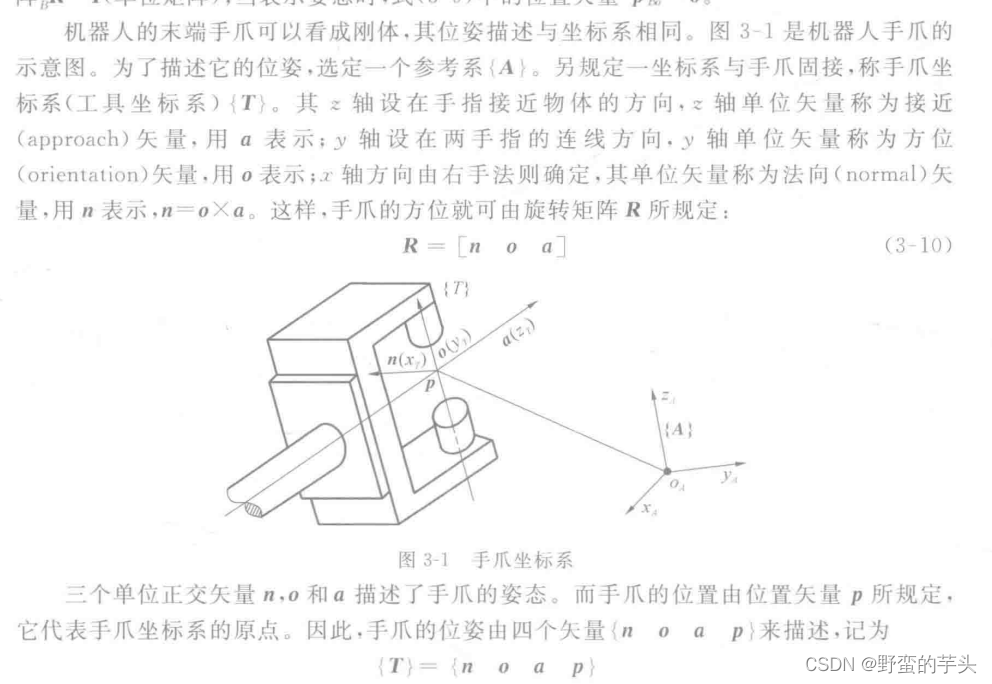
机器人手爪
夹持性手爪
多关节多指手爪
顺应手爪
探测车悬架机构
多足步行机器人机构
RV减速器和谐波减速器












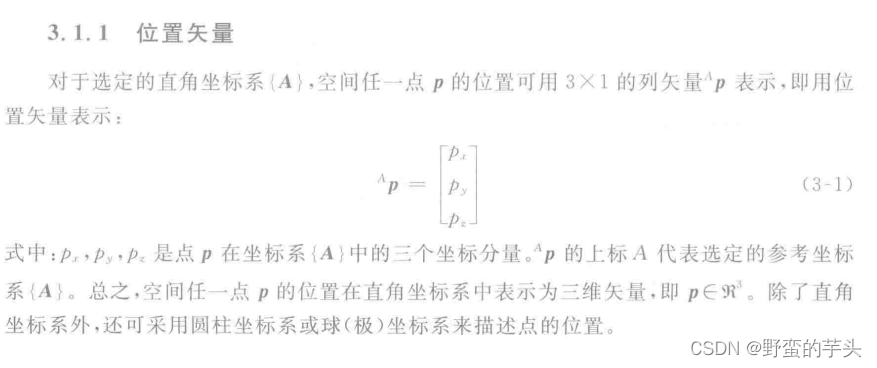
位姿描述和齐次变换
刚体的位置和姿态统称为刚体的位姿,其描述方法较多,如齐次变换方法、矩阵指数方法和四元数方法等。
刚体位姿描述
坐标系描述
坐标变换
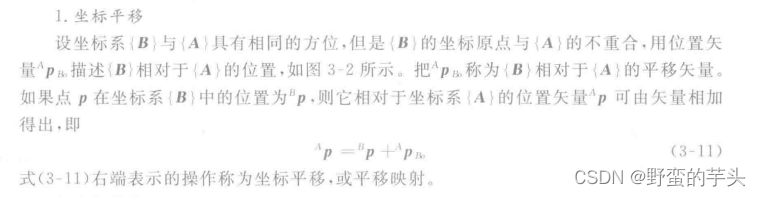
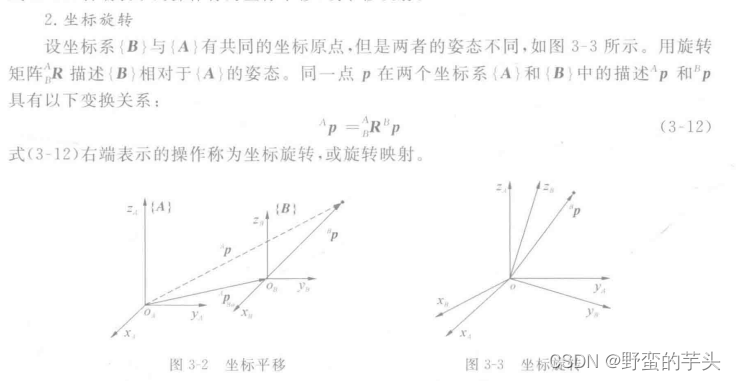
1.坐标平移
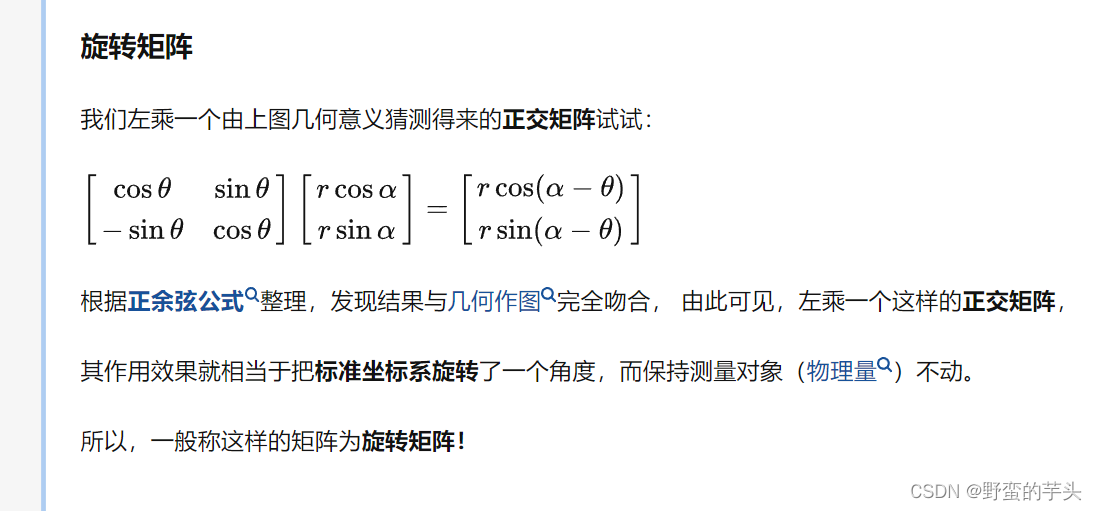
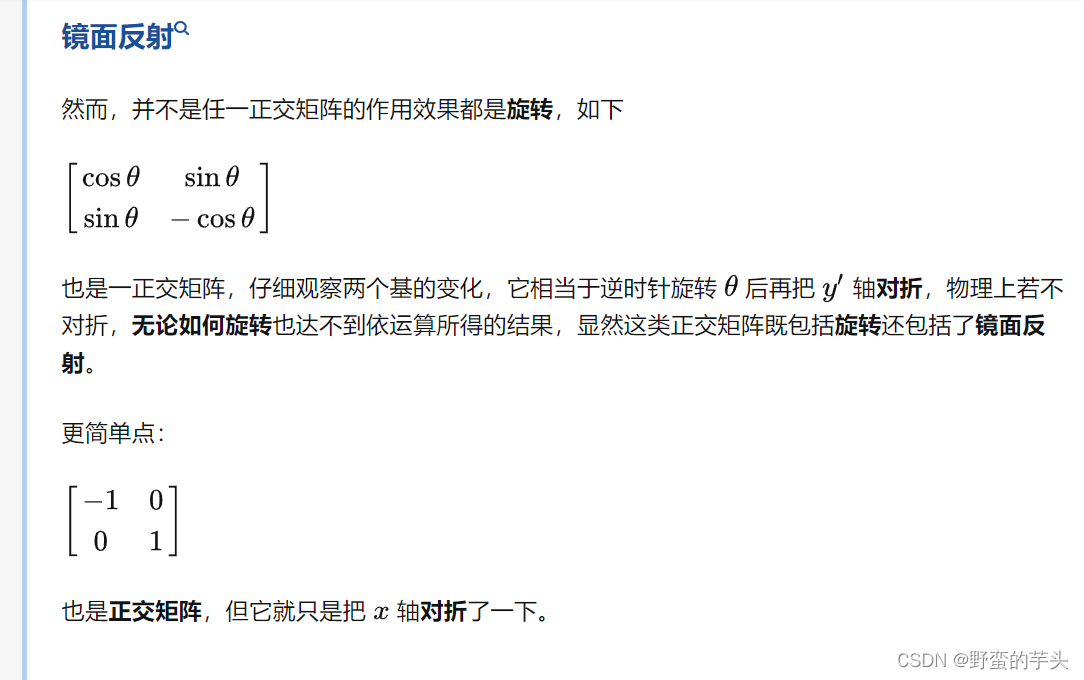
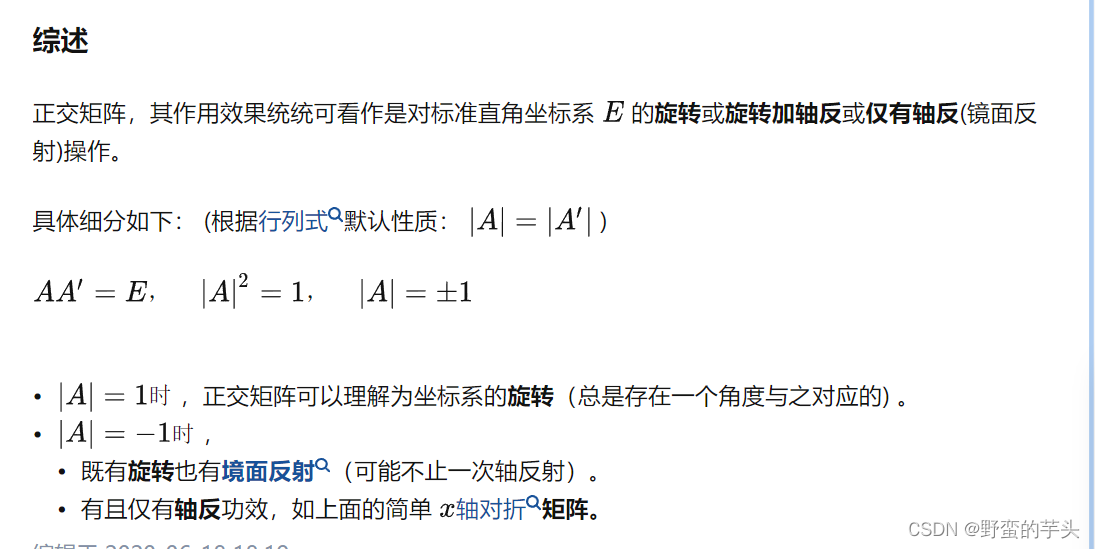
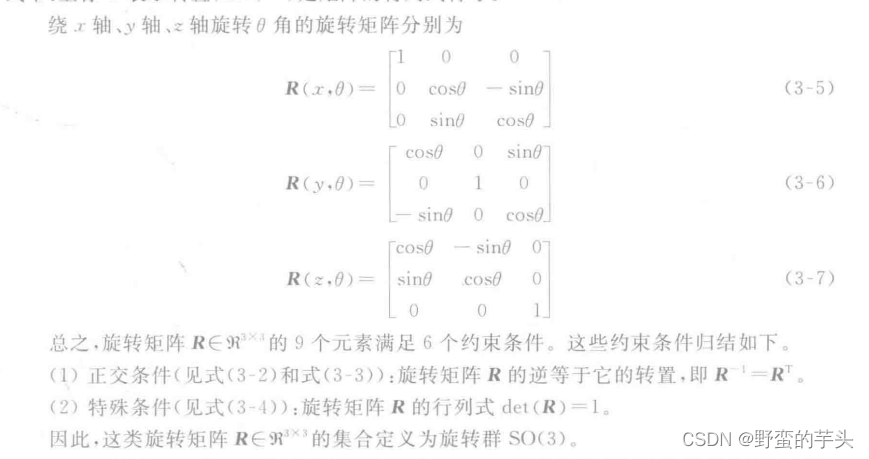
2.坐标旋转
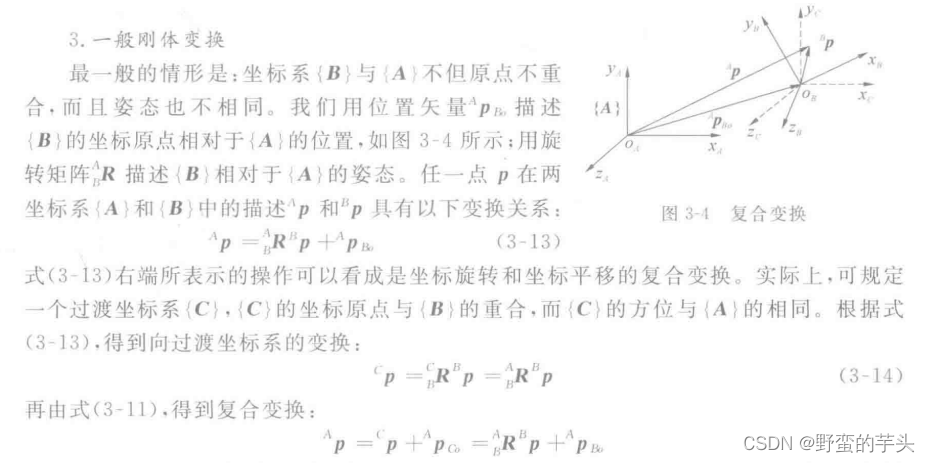
3.一般刚体变换
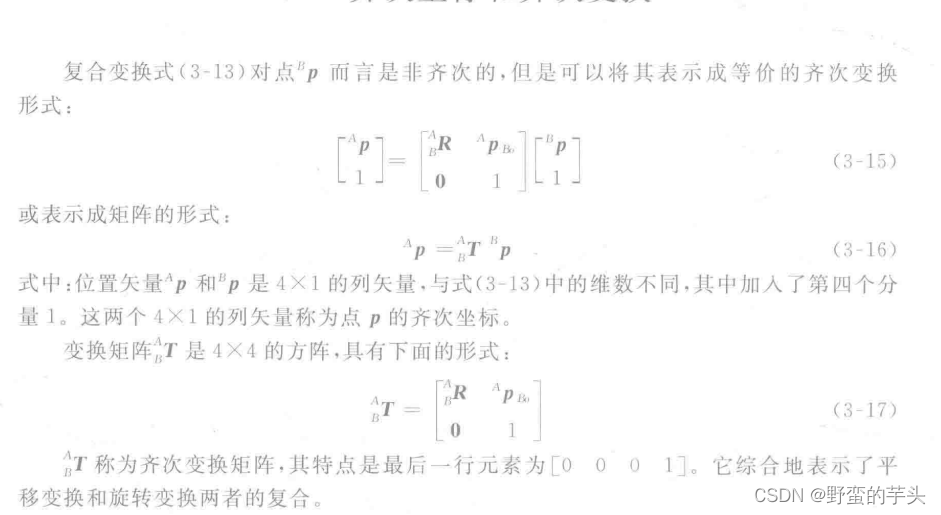
齐次坐标和齐次变换
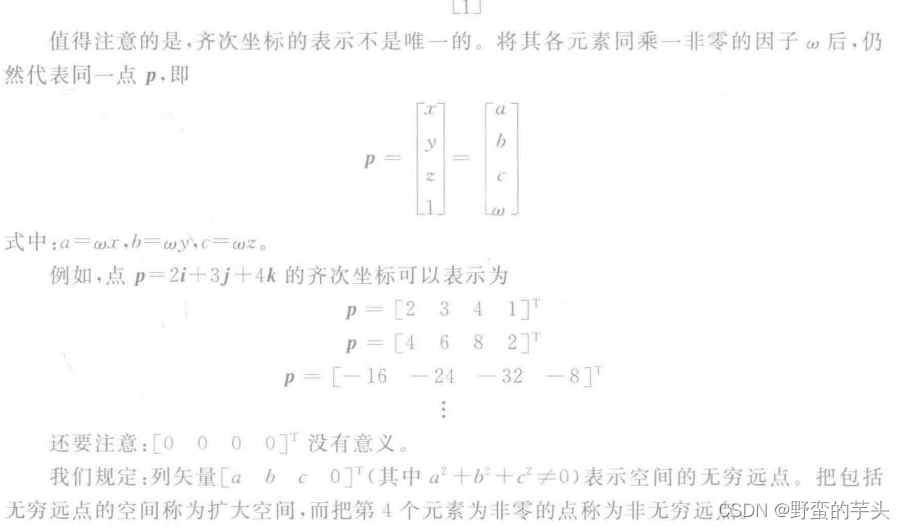
齐次坐标 wiki百科
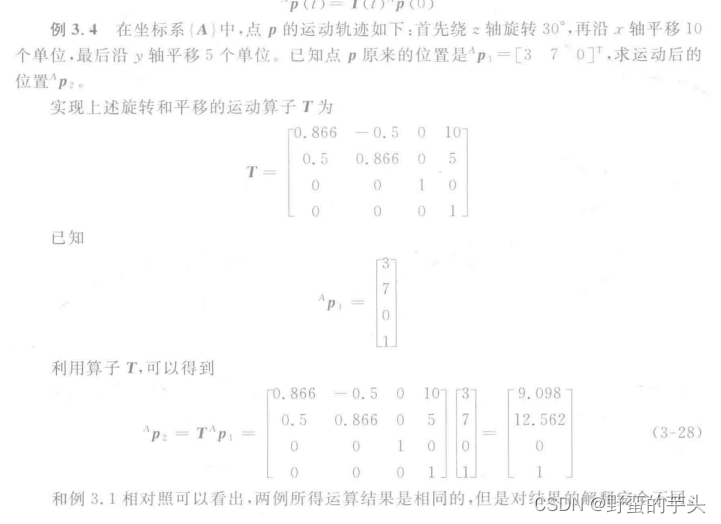
运动算子
什么是算子?
在数学领域里,算子(operator)有别于物理的算符,是一种映射,一个向量空间的元素通过此映射(或模)在另一个向量空间(也有可能是相同的向量空间)中产生另一个元素。
算子对于线性代数和泛函分析都至关重要,它在纯数学和应用数学的许多其他领域中都有应用。 例如,在经典力学中,导数的使用无处不在,而在量子力学中,可观察量由埃尔米特算子表示。 各种算子可以具有包括线性、连续性和有界性等的重要性质。
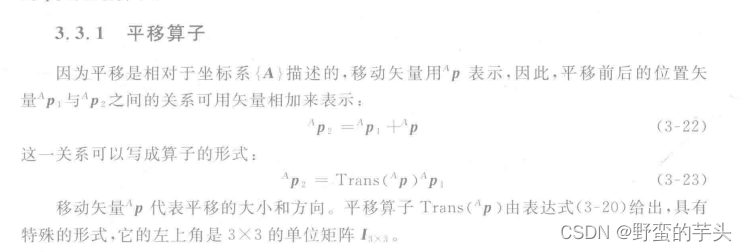
平移算子
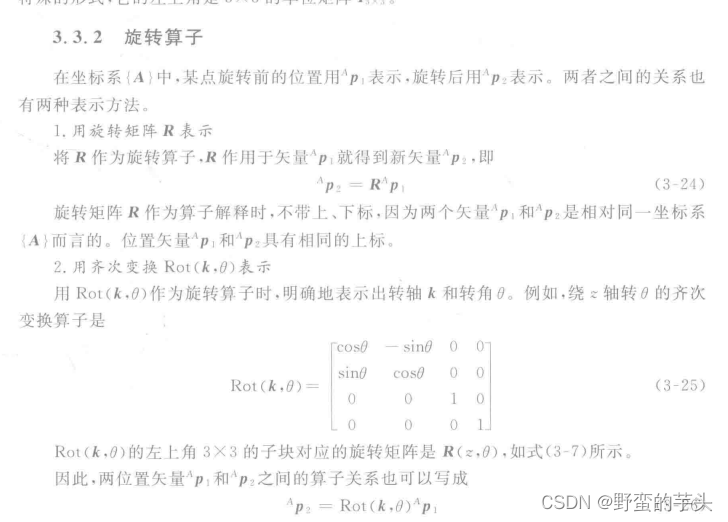
旋转算子
变换矩阵的运算
变换矩阵相乘
相对于固定坐标,使用左乘
变换次序不能随意调换,只有当两变换都是平移变换,或者两变换都是饶同一轴的旋转变换时可以交换次序。
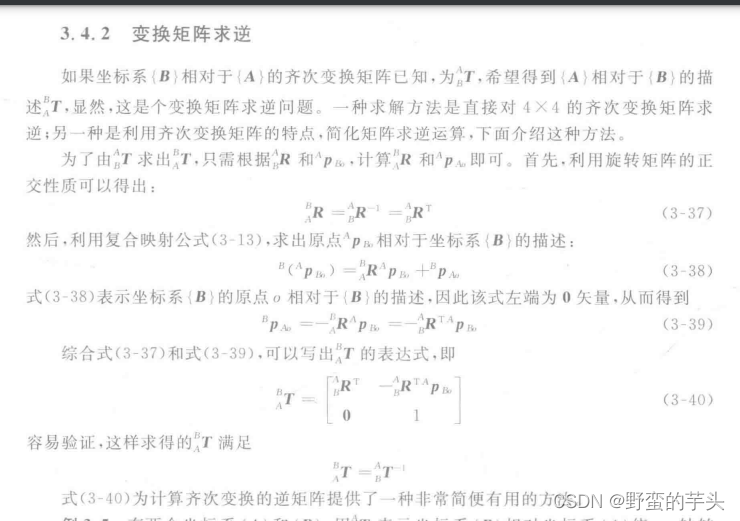
变换矩阵求逆
变换矩阵求逆:一种是直接对4×4的齐次变换矩阵求逆;另一种是利用齐次变换矩阵特点,简化矩阵求逆运算。
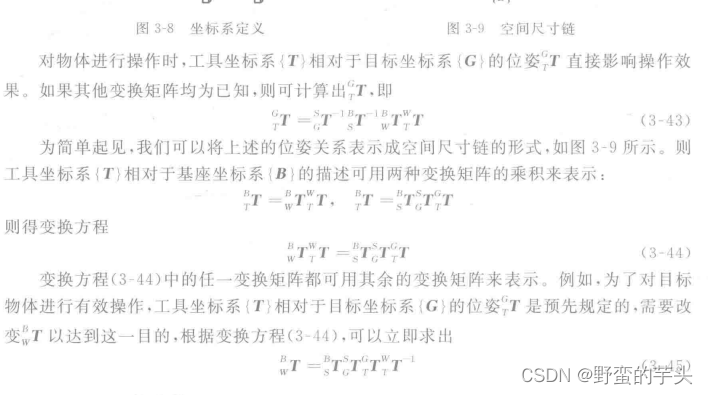
变换方程
欧拉角与RPY角
绕固定轴x-y-z旋转(RPY角):RPY角是描述船舶在海中航行时姿态的一种方法。将船的行驶方向取为z轴的方向,则饶z轴的旋转角称为回转(roll),饶y轴旋转称为俯仰(pitch),饶x轴旋转称为偏转(yaw)
z-y-x欧拉角:
旋转变换通式
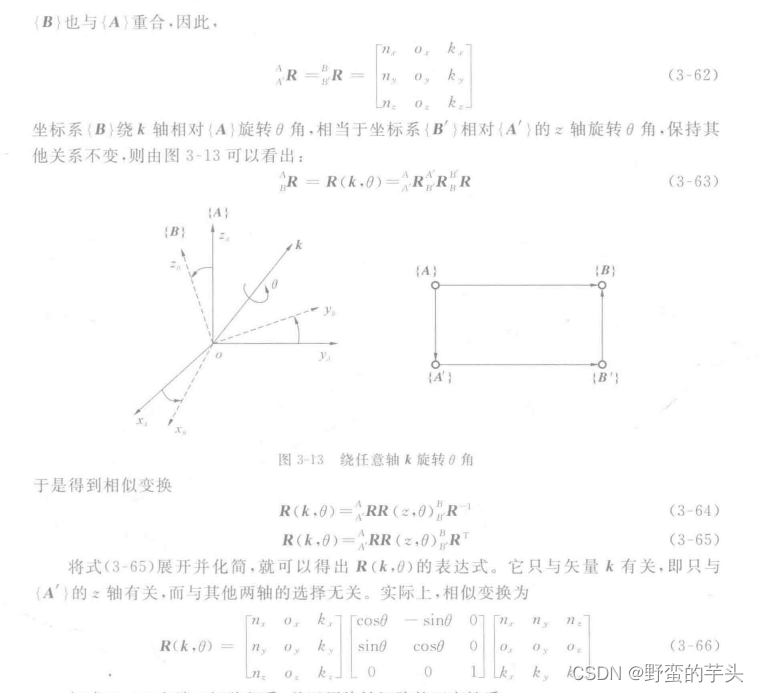
绕过过原点的单位矢量k旋转θ角
等效转轴和等效转角
齐次变换通式
自由矢量变换
位姿的综合
相容性、独立性和完备性
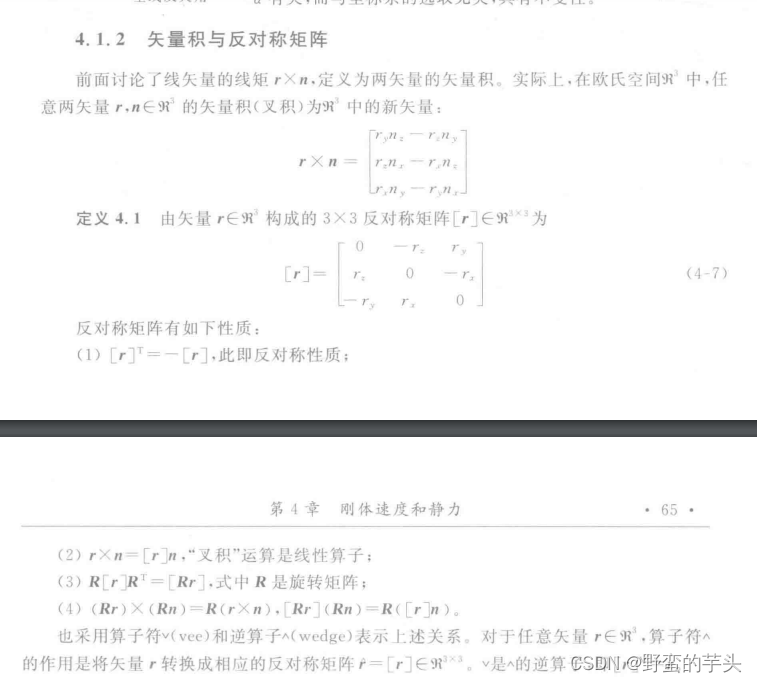
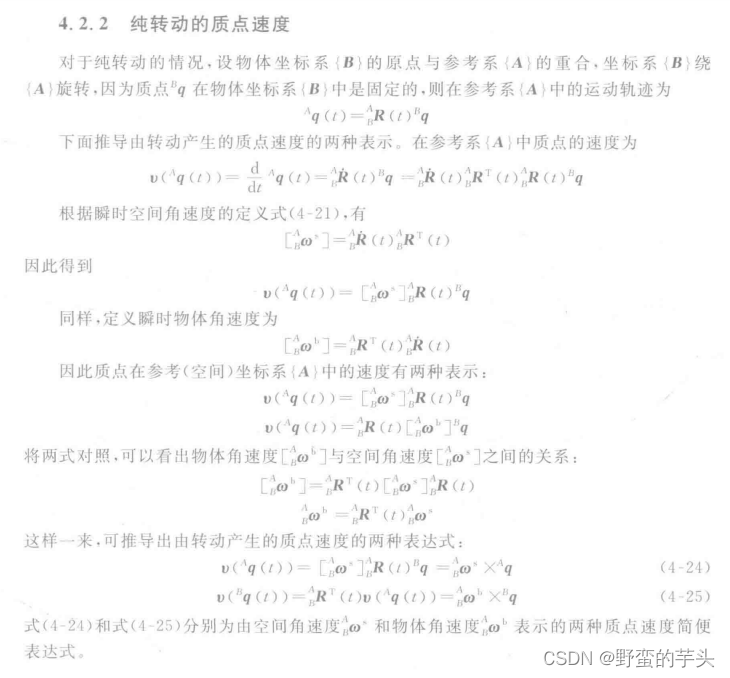
第四章 刚体速度和静力
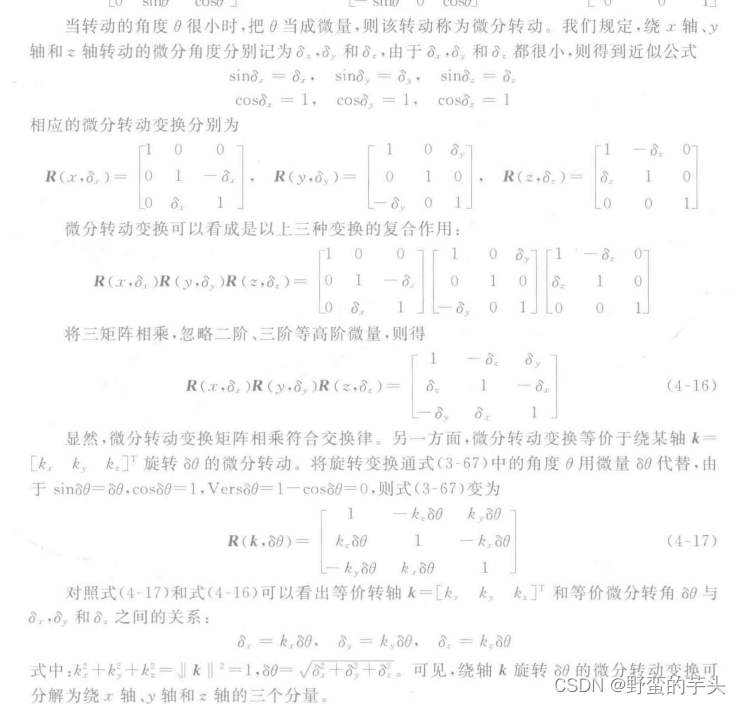
微分转动和转动速度
纯转动的质点速度
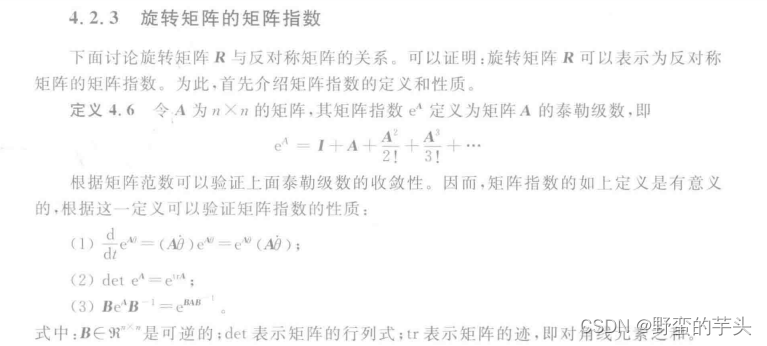
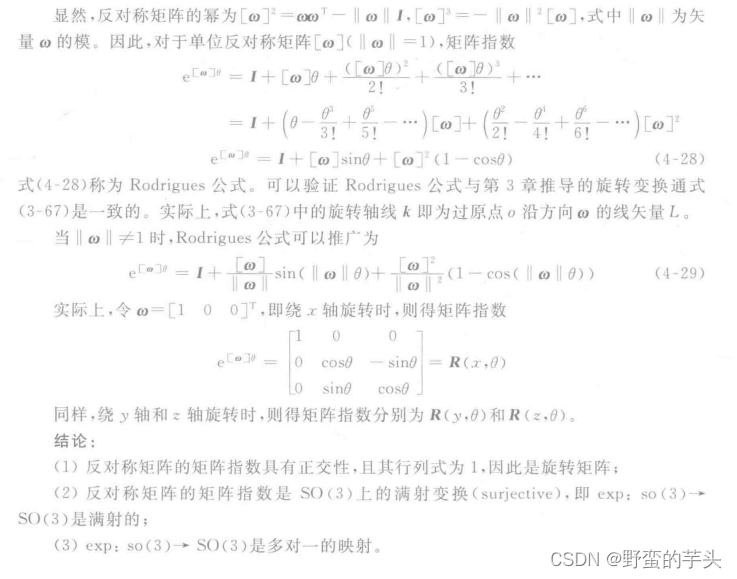
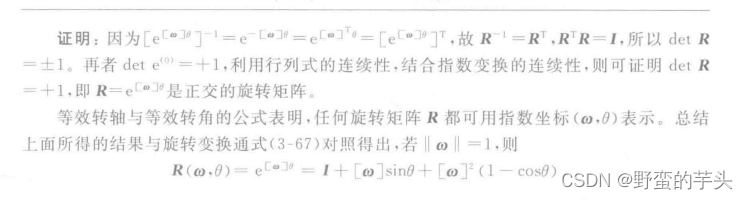
旋转矩阵的矩阵指数
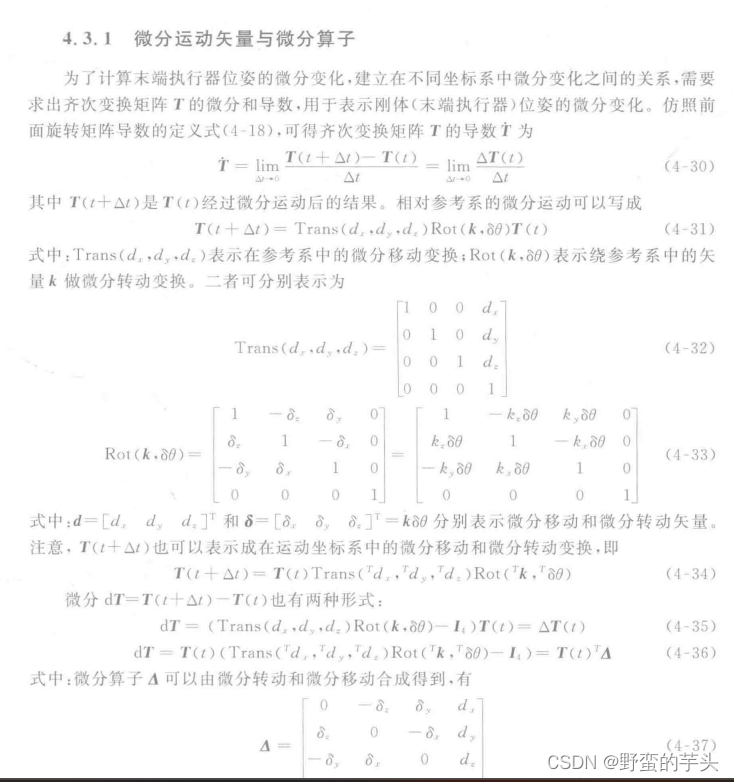
微分运动与运动旋量
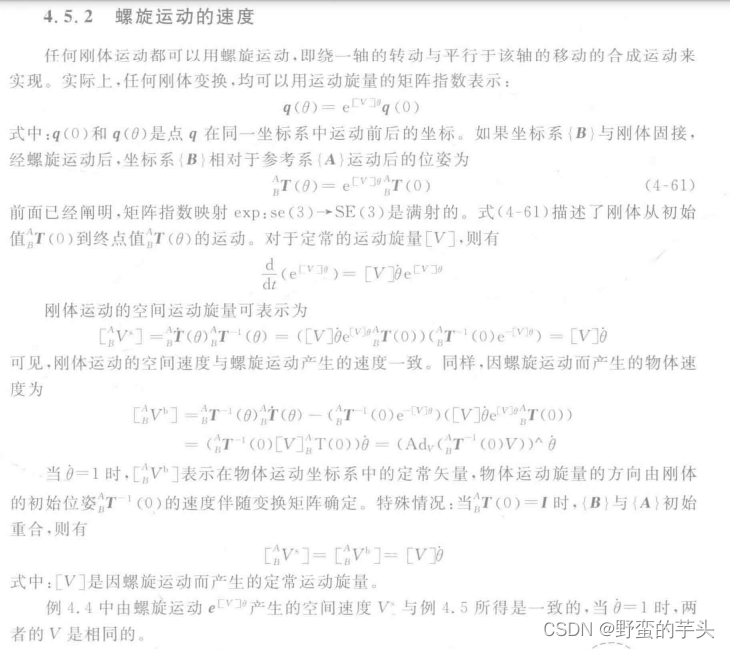
运动旋量的螺旋坐标
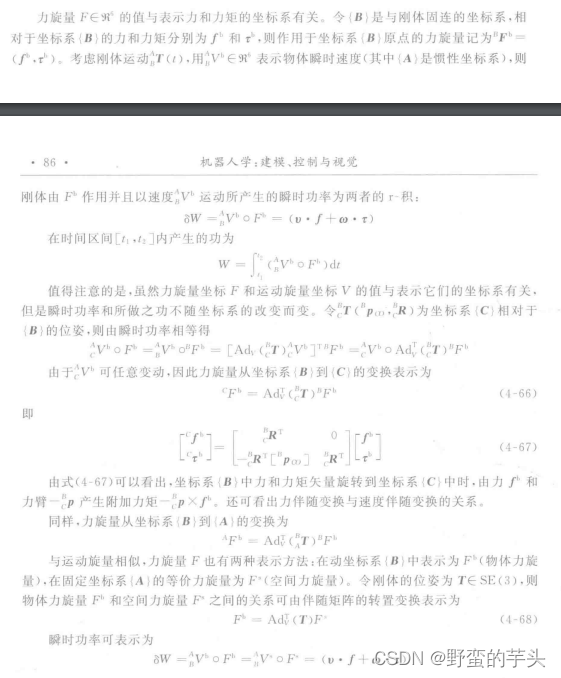
力旋量
力旋量的伴随变换
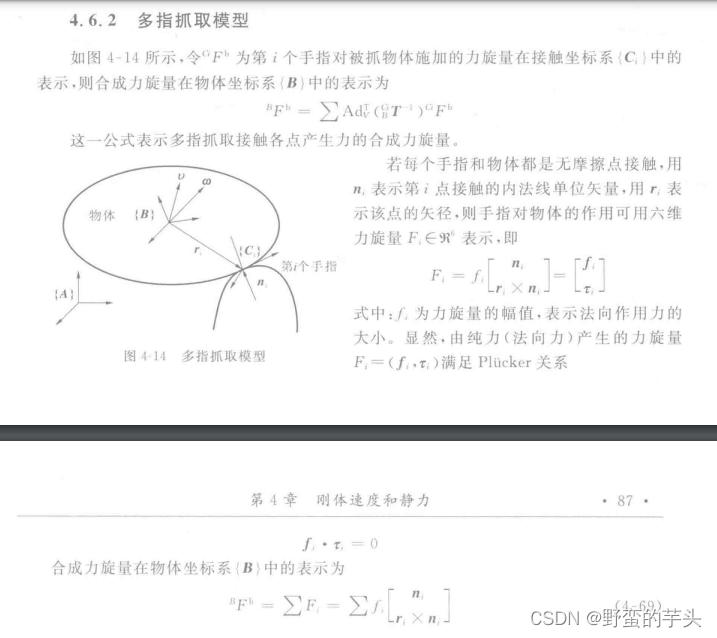
多指抓取模型
力旋量的螺旋坐标
第五章 操作臂运动学
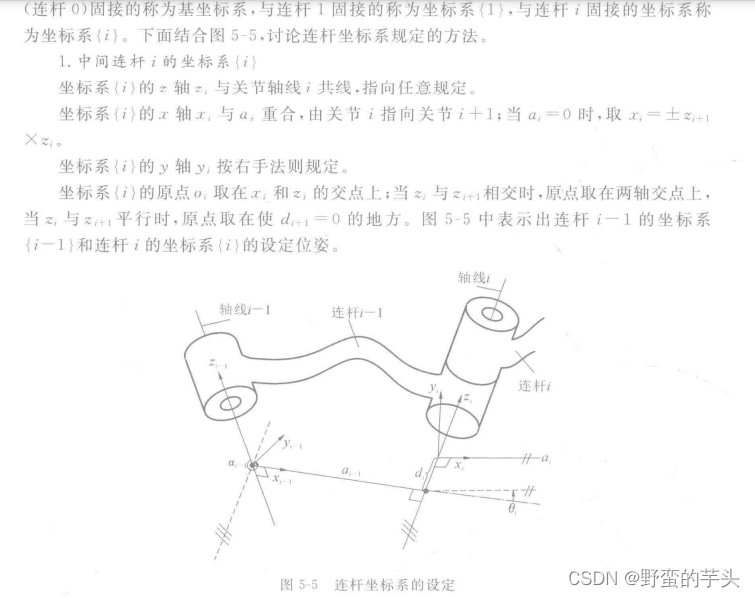
连杆坐标系
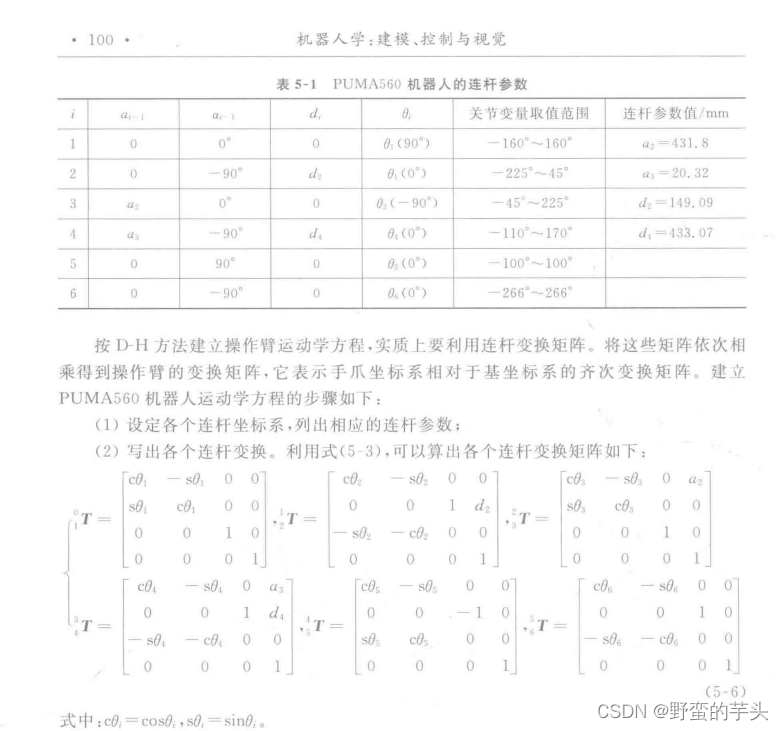
连杆变换和运动学方程
SCARA机器人:3个旋转关节,1个移动关节
PUMA560机器人 6个旋转关节:
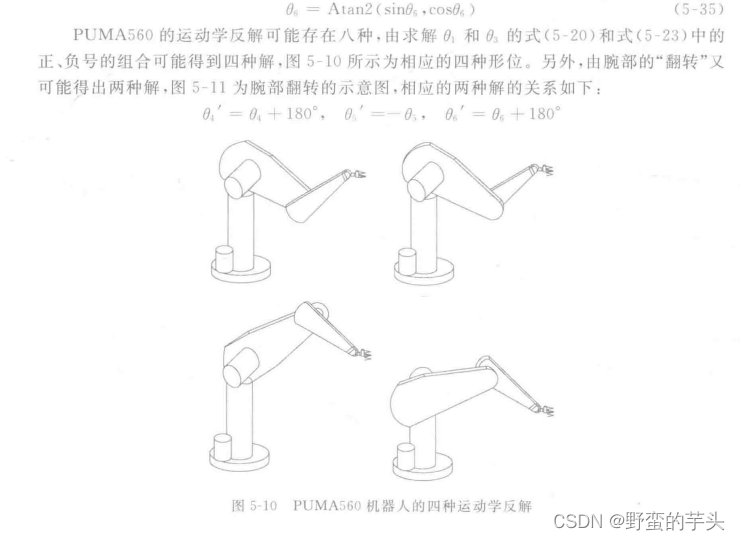
PUMA560机器人运动学反解
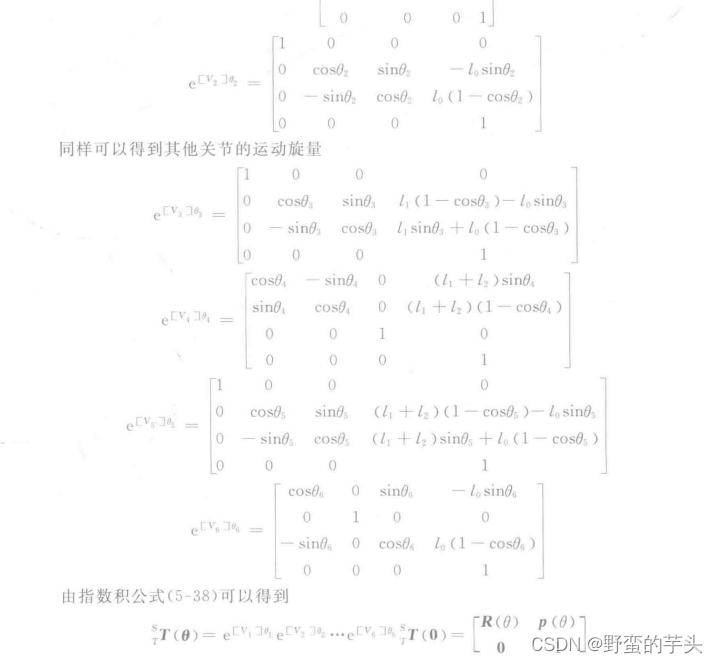
指数积公式
ELBOW机器人(6个旋转关节)
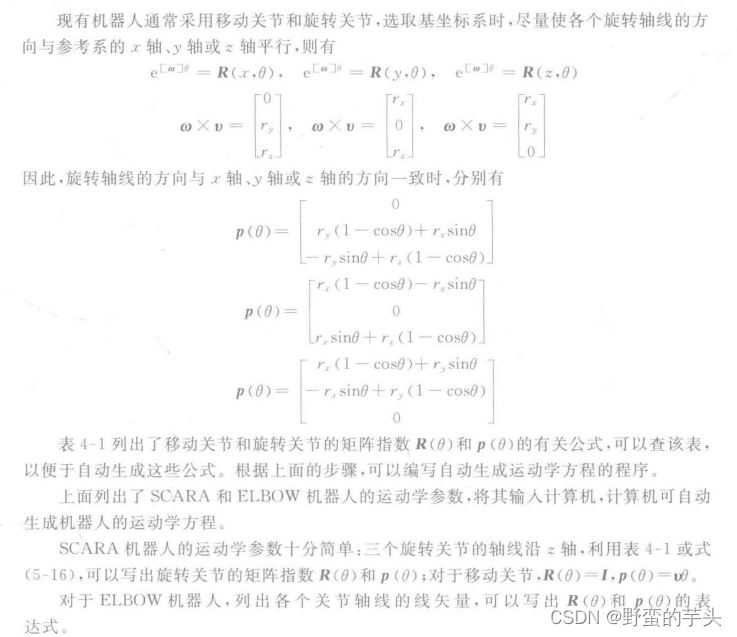
运动学方程的自动生成:
PUMA560机器人利用D-H方法,求出六个连杆变换矩阵,自动生成运动学方程。
D-H方法的缺点是要建立各个连杆坐标系,输入的参数较多。采用指数积公式,利用线矢量表示自动生成运动学方程比较简单直观。
运动学方程自动生成算法:
几种典型的反解子问题:
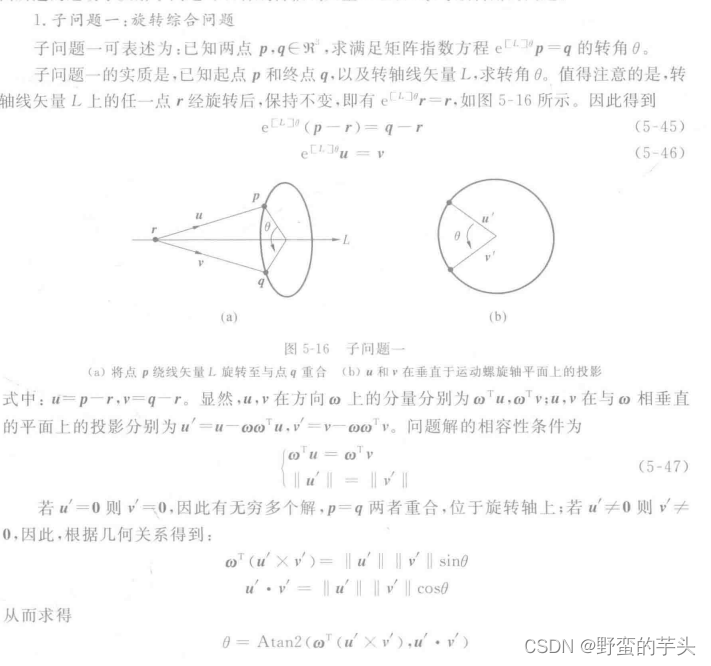
1.旋转综合问题
2.绕两轴旋转反解问题
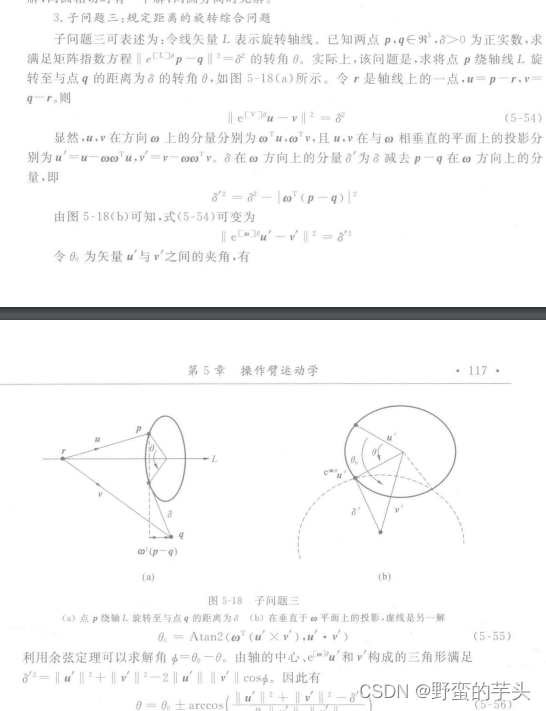
3.规定距离的旋转综合问题
运动学的封闭解和解的存在性、唯一性
大多数工业机器人都满足封闭解的两个充分条件之一(称为Pieper准则):1.三个相邻关节轴交于一点;2.三个相邻关节轴相互平行。
PUMA和Stanford机器人满足第一个条件,而ASEA和MINIMOVER机器人满足第二个条件。
腕部位置的反解:
手腕方位的反解
运动学反解的存在性和工作空间:
驱动空间、关节空间和操作空间
并联机构运动学
结构方程
运动学反解
位姿正解
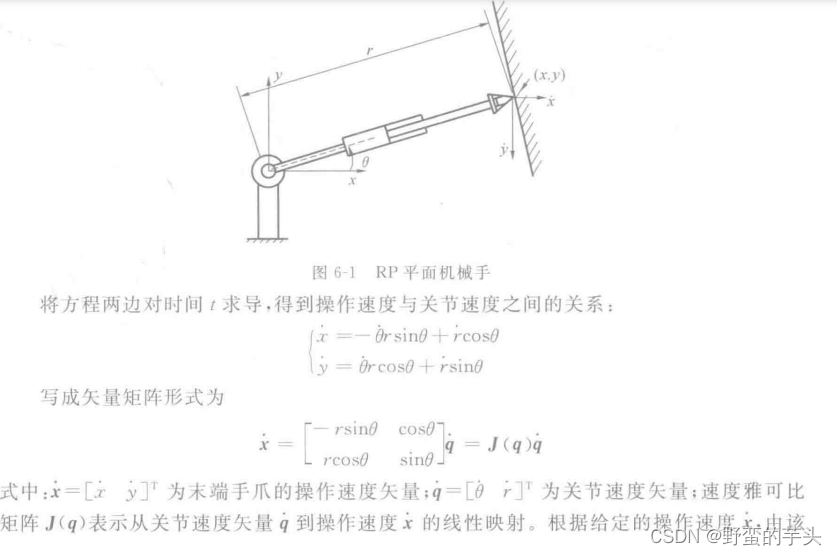
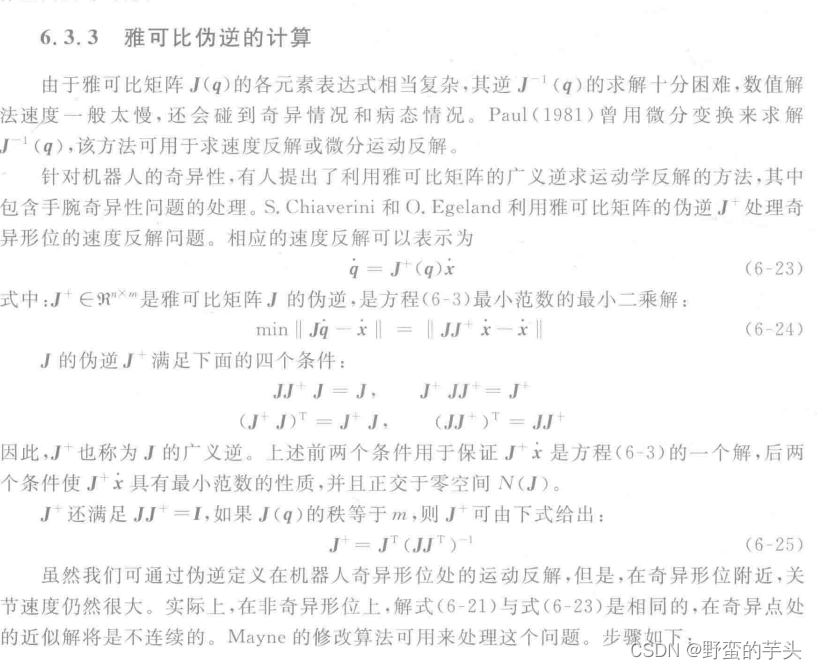
操作臂的雅克比矩阵
操作臂的速度雅可比矩阵是J(q)是关节速度矢量到操作速度矢量的线性映射。
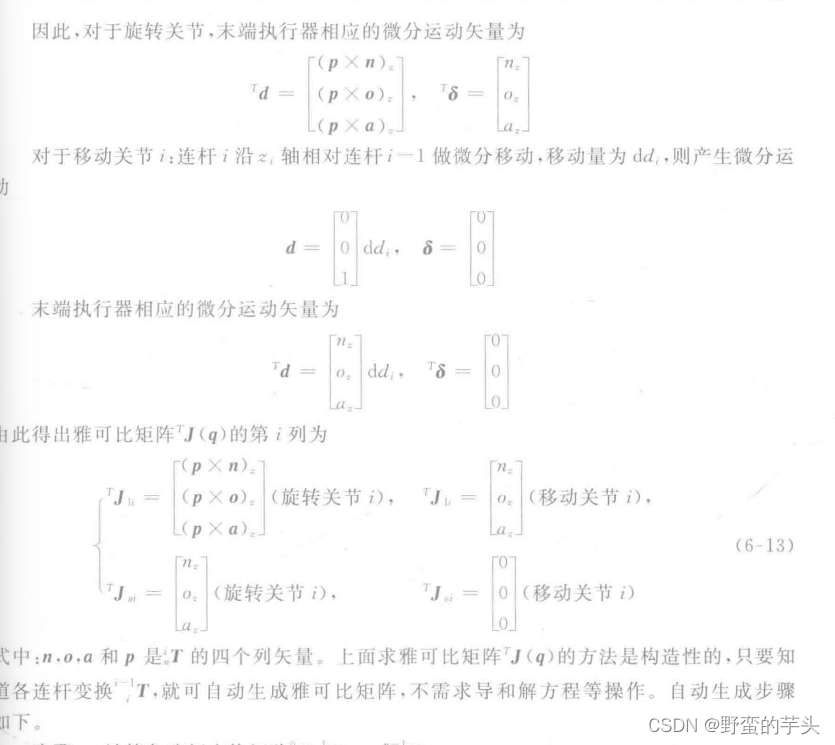
矢量积方法
微分变换法
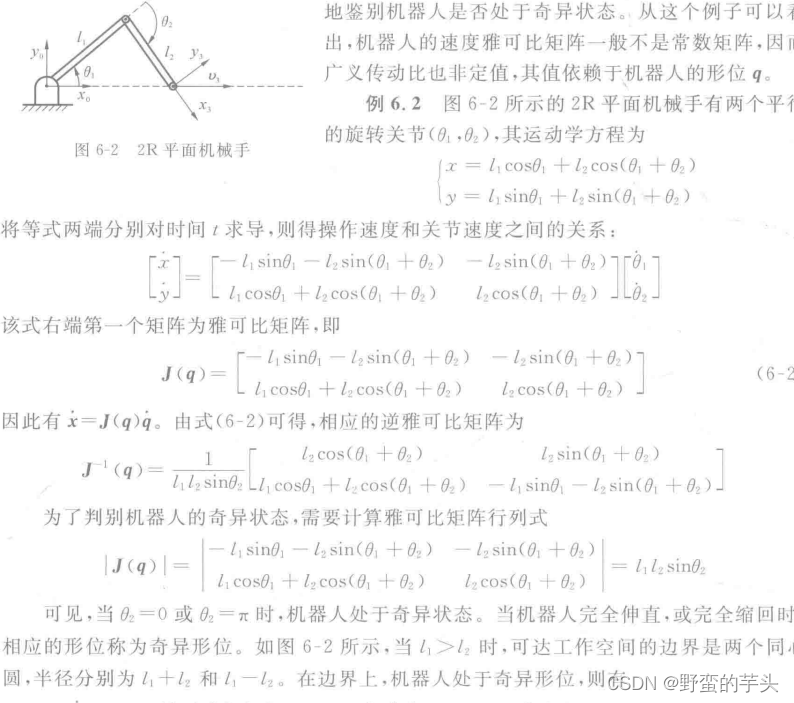
逆雅克比矩阵和奇异性
冗余度机器人
对于某一任务,当关节空间的维数大于操作空间的维数,即n>m时,该机器人称为冗余度机器人。当J是满秩的时,零空间的维数称为冗余度。
操作臂动力学
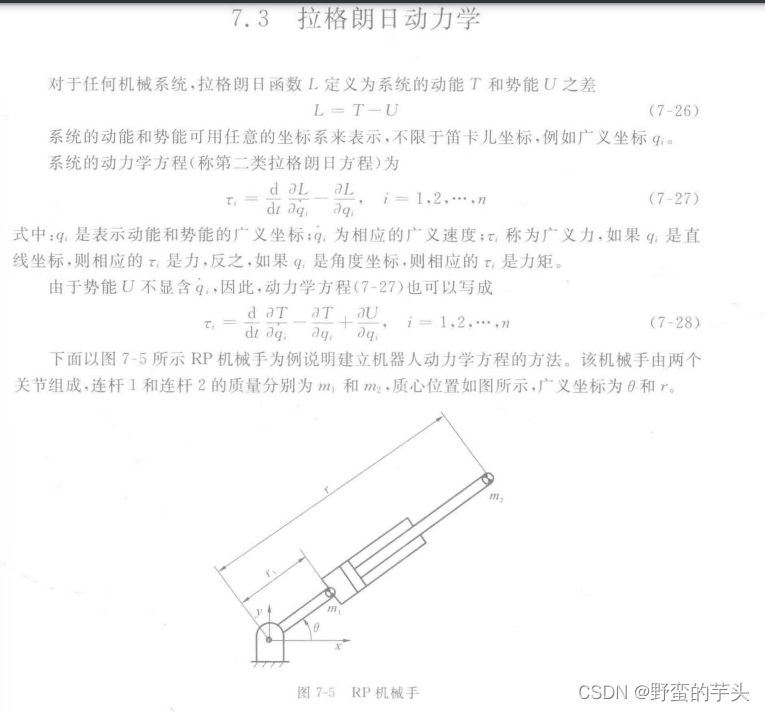
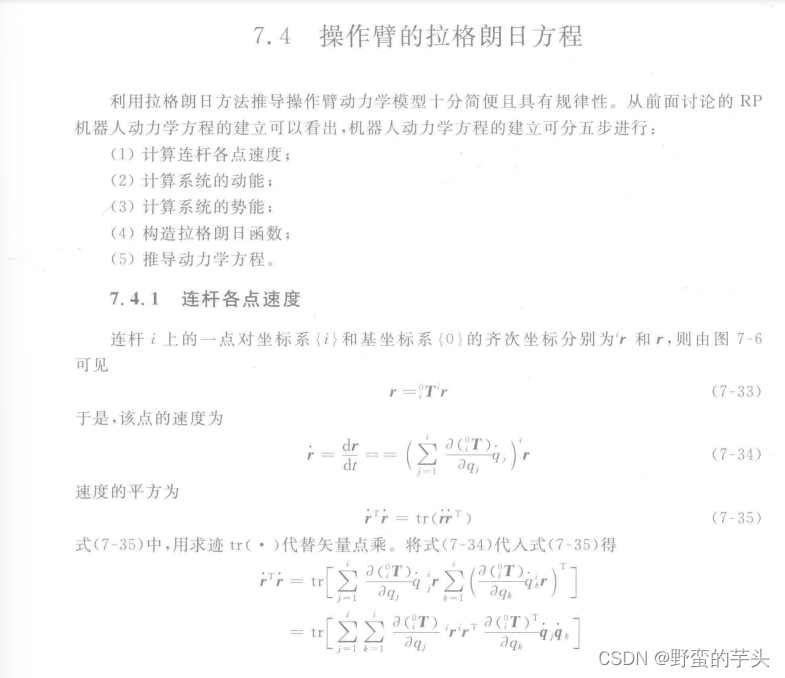
拉格朗日动力学
操作臂的拉格朗日方程
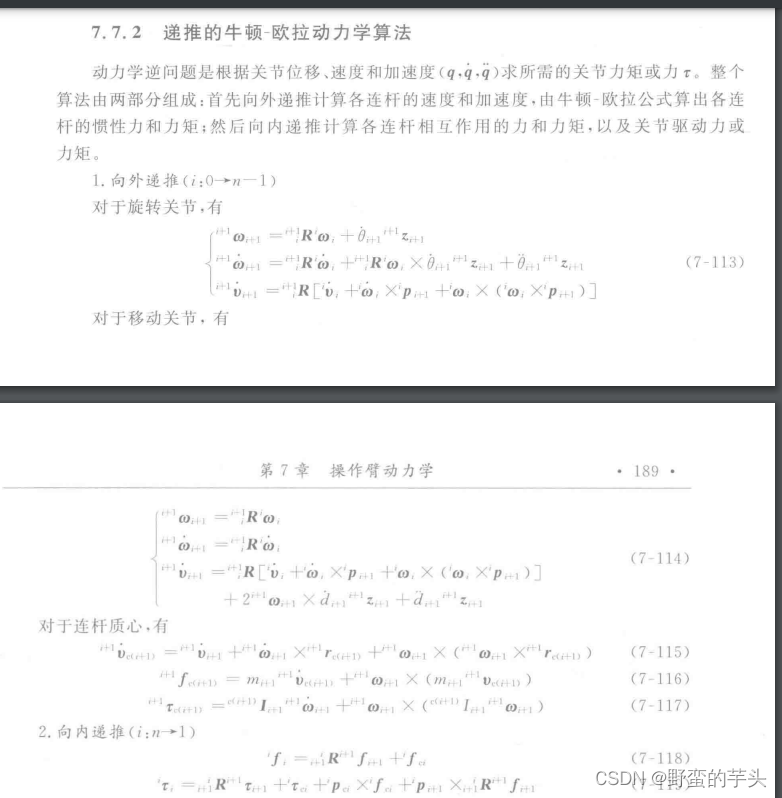
牛顿-欧拉递推动力学方程
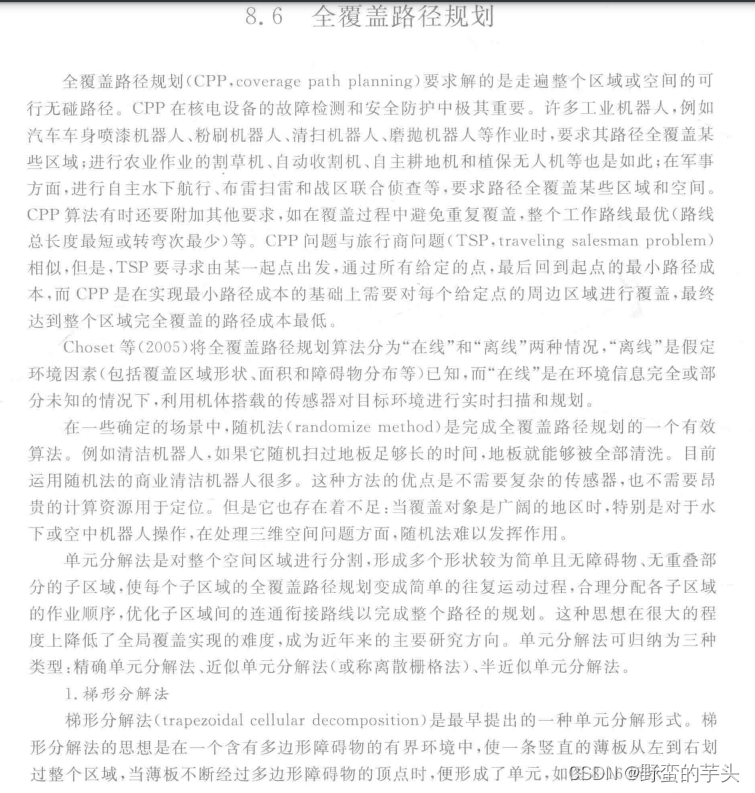
第八章 轨迹生成
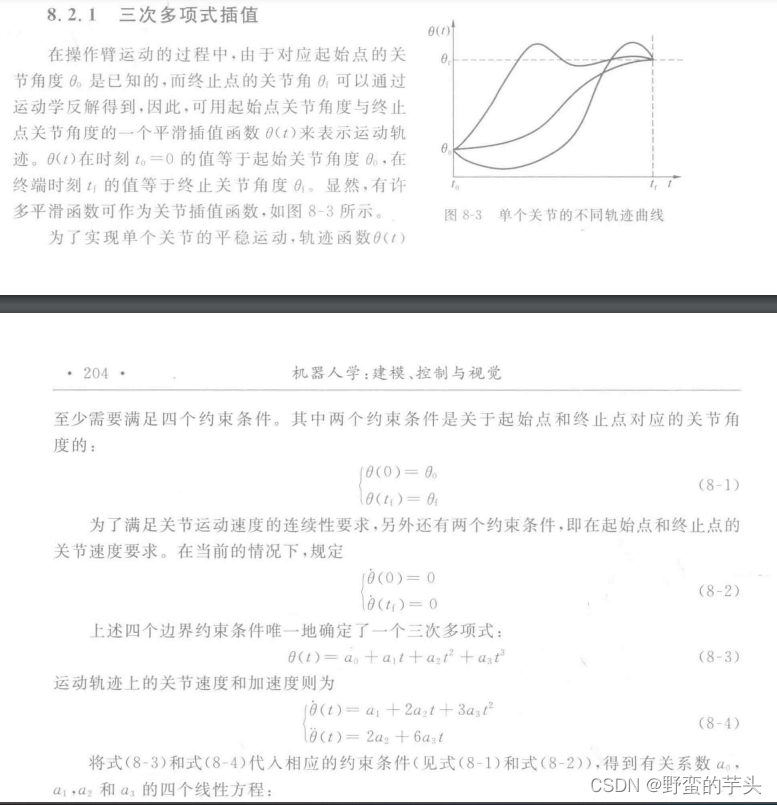
三次多项式插值:
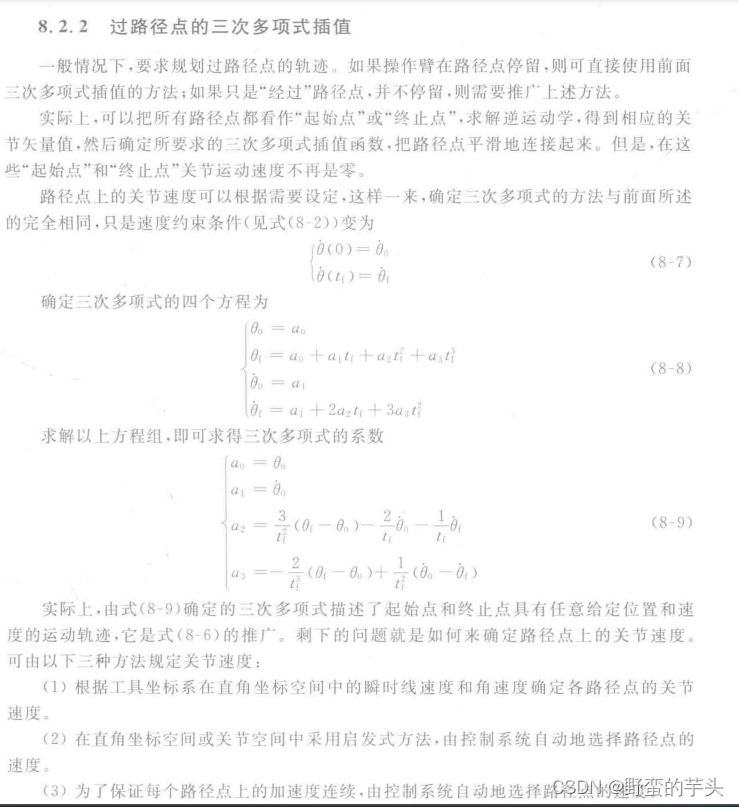
过路径点的三次多项式插值:
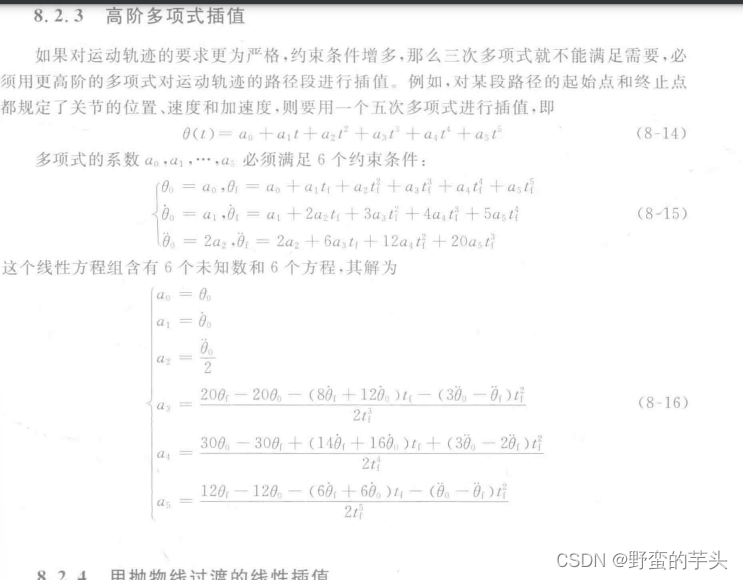
高阶多项式插值
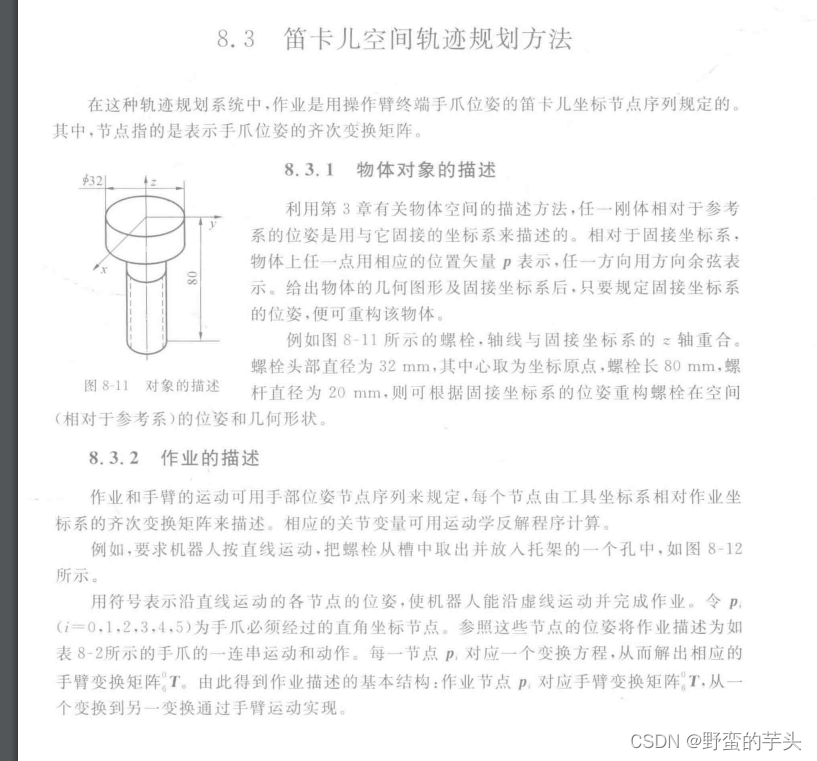
笛卡尔空间轨迹规划方法
轨迹的实时生成
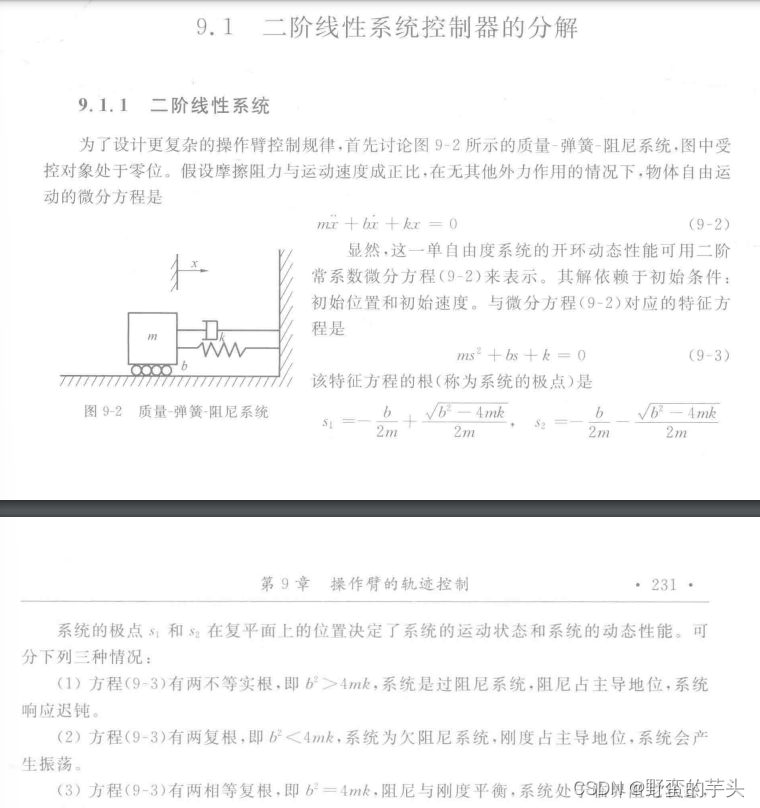
第九章 操作臂的轨迹控制
二阶线性系统控制器:
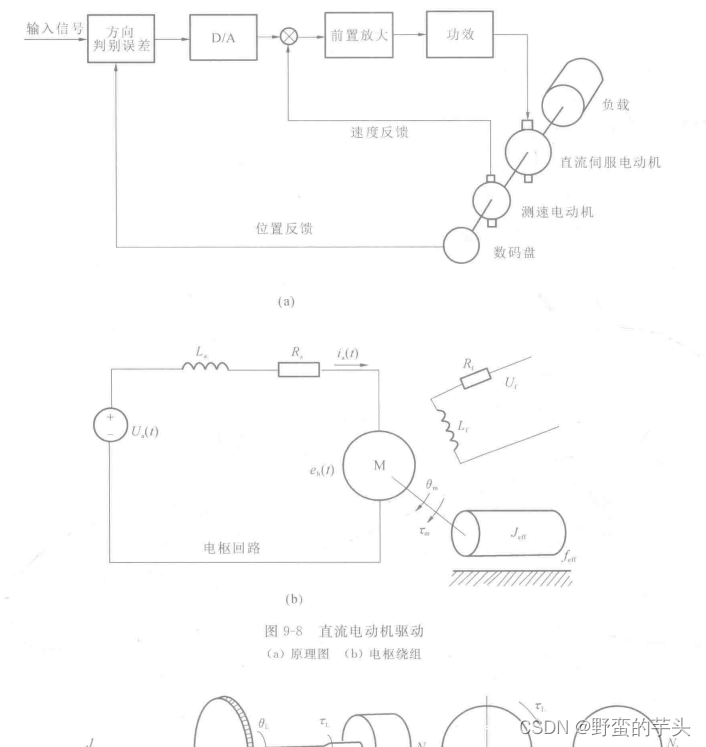
单关节的建模和控制
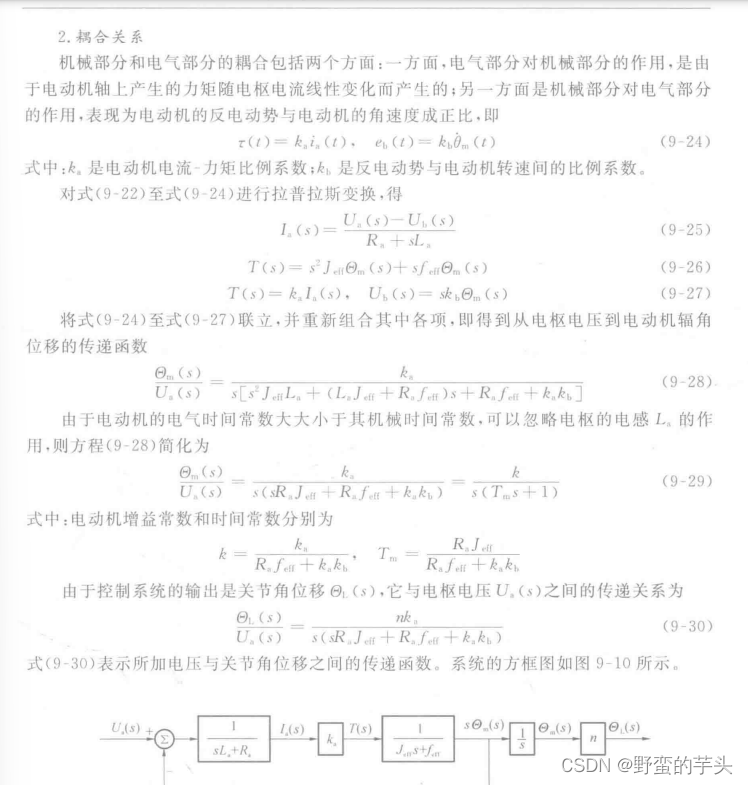
耦合关系
机器人的力控制
第十一章 运动规划
广义维罗尼图法
人工势力场法:
第十二章 协调控制
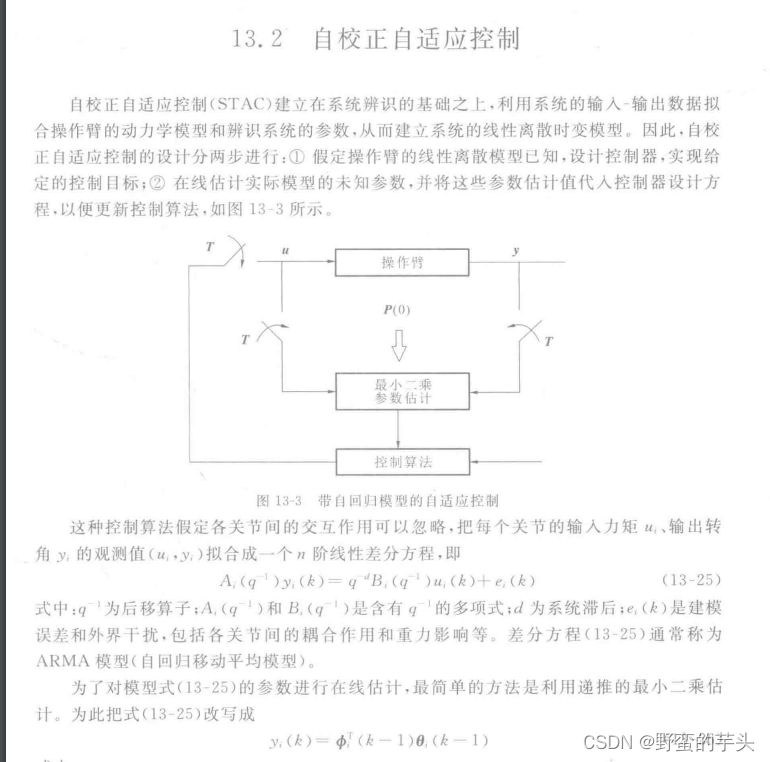
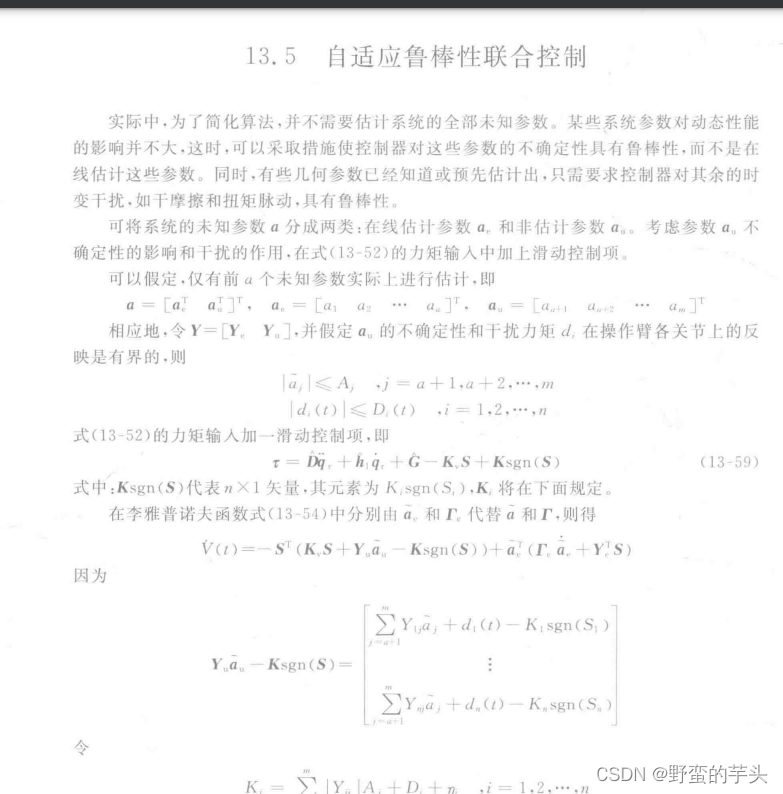
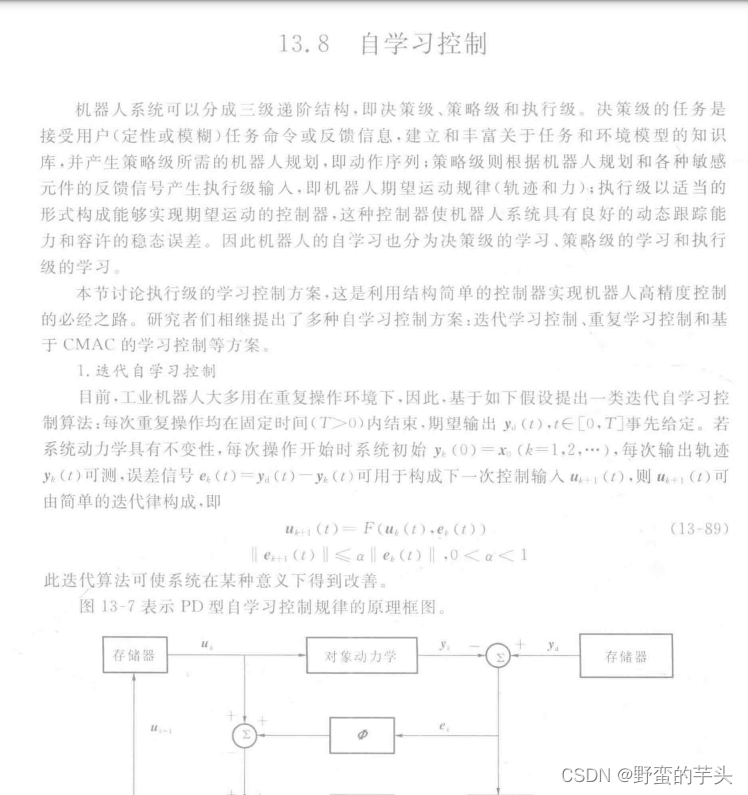
第十三章 自适应控制
鲁棒是Robust的音译,也就是健壮和强壮的意思。 它也是在异常和危险情况下系统生存的能力。 比如说,计算机软件在输入错误、磁盘故障、网络过载或有意攻击情况下,能否不死机、不崩溃,就是该软件的鲁棒性。 所谓“鲁棒性”,也是指控制系统在一定(结构,大小)的参数摄动下,维持其它某些性能的特性。
第十四章 视觉图像处理
第十五章 视觉运动控制








魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)