openpnp - 元件/封装的底部相机视觉识别的尺寸调整
文章目录
openpnp - 元件/封装的底部相机视觉识别的尺寸调整
笔记
对元件进行底部相机视觉识别的目的
为了防止吸取元件没吸取到,就往板子上空贴,引起事故。
元件没吸取到的可能原因
- 飞达坐标没设置好,导致顶部相机虽然看到元件了,但是吸嘴实际落到的地方下面,却没有元件
- 编带底部没垫实称,导致元件编带下面悬空,吸嘴落下时,将元件震飞了,发生跳料。
- 吸嘴到元件的表面的下落距离没设置好,导致吸嘴没接触到元件。
元件/封装视觉识别失败的原因
- 元件在底部相机视觉识别后,测量估算的尺寸和封装填写的尺寸相差太多。
- 底部相机视觉识别抓的特征点矩形,并不是元件datasheet上些的外形,而是pin外形框住的矩形。
封装尺寸填写的地方
元件的长度/宽度在packages => Footprint中填写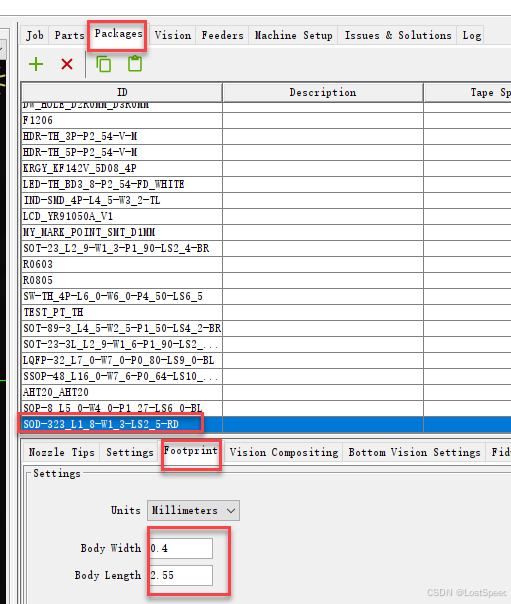
元件的高度在Parts => Height中填写
在不知道底部相机视觉识别结果的前提下(e.g. 提前建立散料飞达/自动飞达位置),事先填写时,按照元件datasheet上填写的尺寸来。
e.g. SOD323如下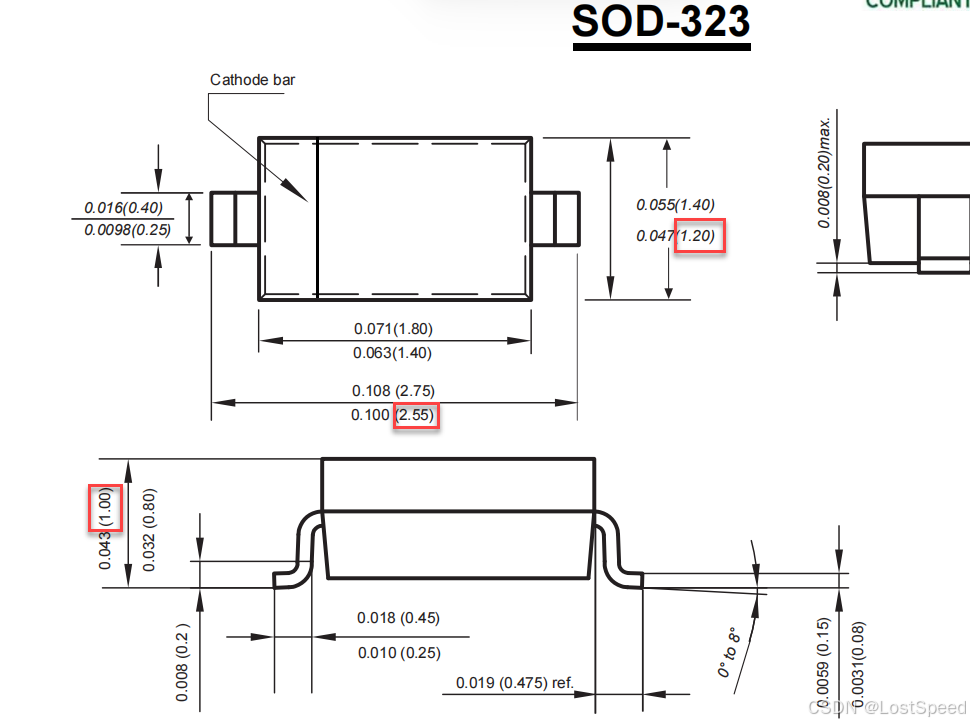
元件的拾取和底部相机视觉识别的测试
元件的拾取
元件的底部相机视觉识别
切到封装页,进行视觉识别测试。
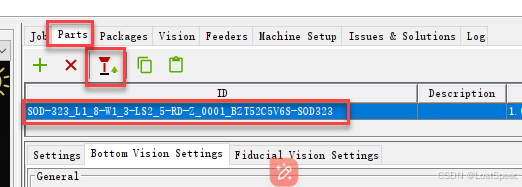
不要在元件页面进行测试。
因为同一种封装可能会用于多种元件,通用一些。
只有某种元件的封装识别的不好的情况下,才用元件具体的视觉识别作为补充。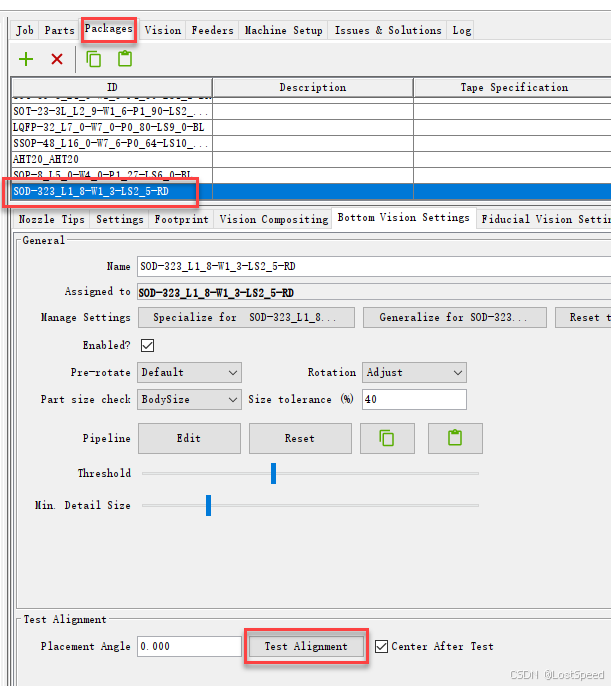
识别结果
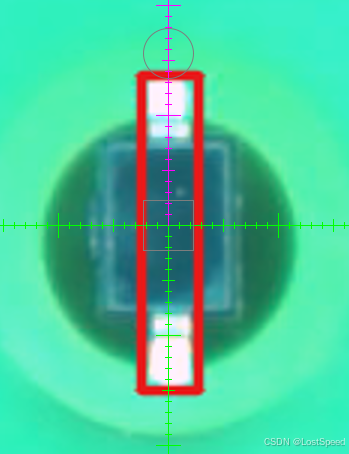
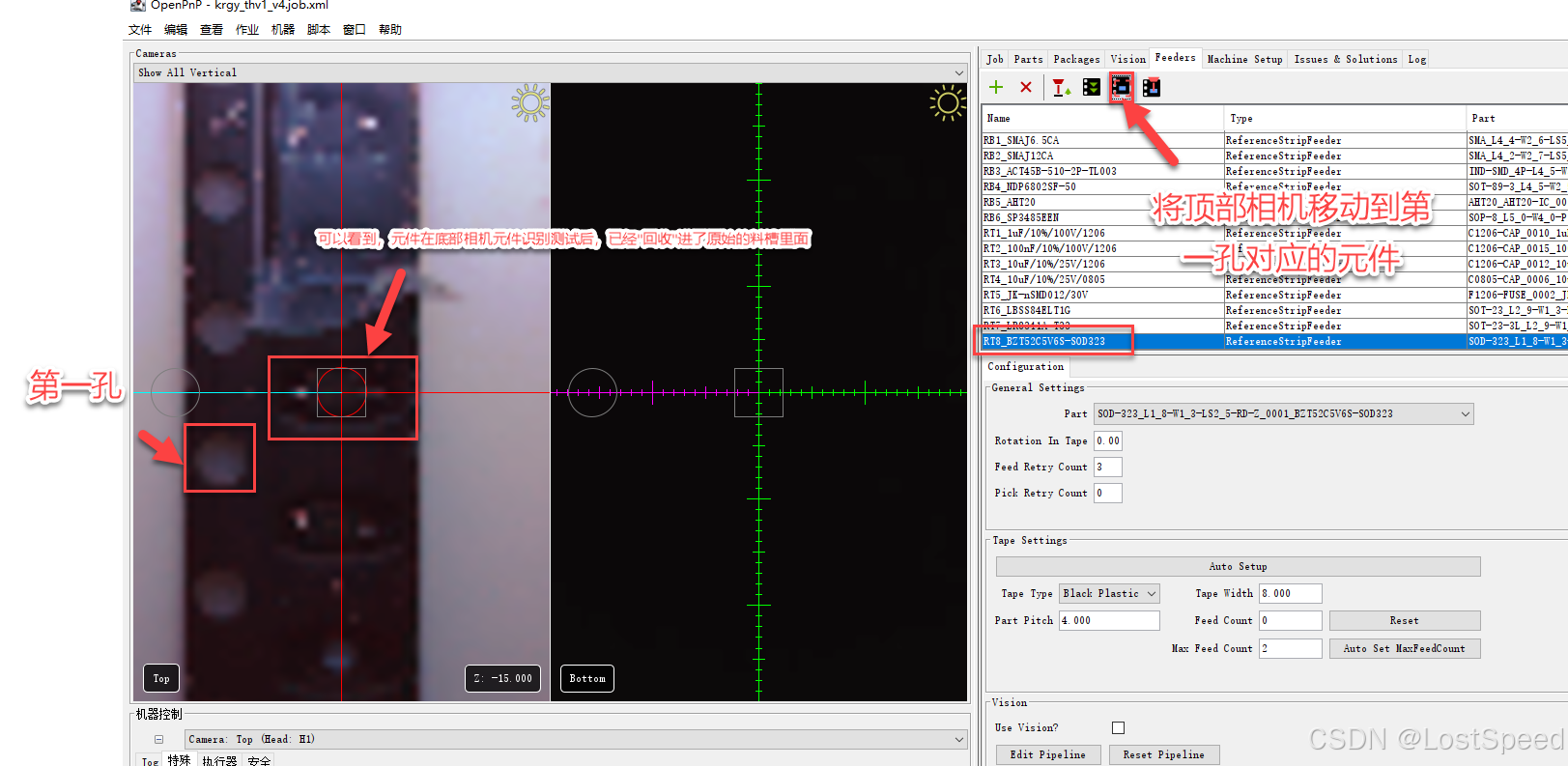
可以看到,底部相机封装的识别,并没有按照元件外形画框,而是针对找到的pin画框。
即使没有按照元件外形识别,也是可以的,只要能识别到红框(不管是外形的红框,还是pin外形组成的红框)就行。因为我们的目的是元件0角度对齐和是否吸取到了元件,只要能检测到元件上的红框,目的就已经达到了。
这时,如果视觉检测的结果红框和元件datasheet外形定义差太多,就会报错如下。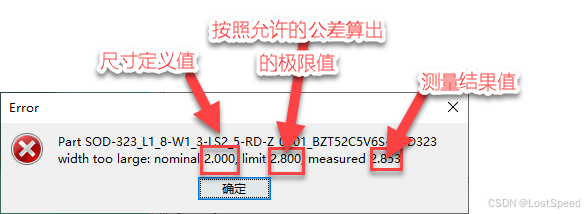
公差(size 精度)设置的地方如下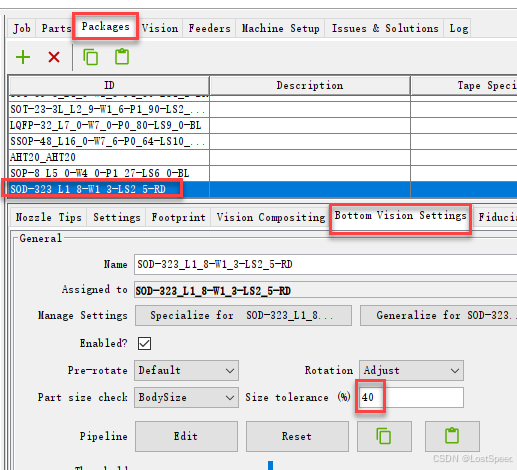
元件尺寸的修改
这个"元件尺寸",不是元件的识别尺寸,而是底部相机对元件抓取后,识别的红框矩形的尺寸。
那么对照底部相机视觉检测结果和元件的datasheet, 可以确定这个红框,长度应为2.55mm, 宽为0.4mm.
将调整后的尺寸,填入 Packages => Footprint 中。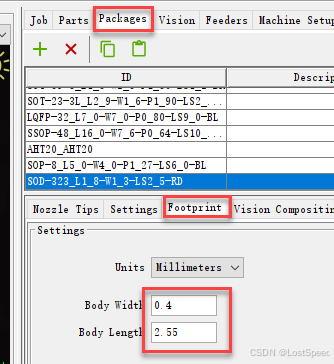
底部相机元件识别通过的样子
- 没有报错
- 将元件摆正了。
将元件摆正的设置的地方
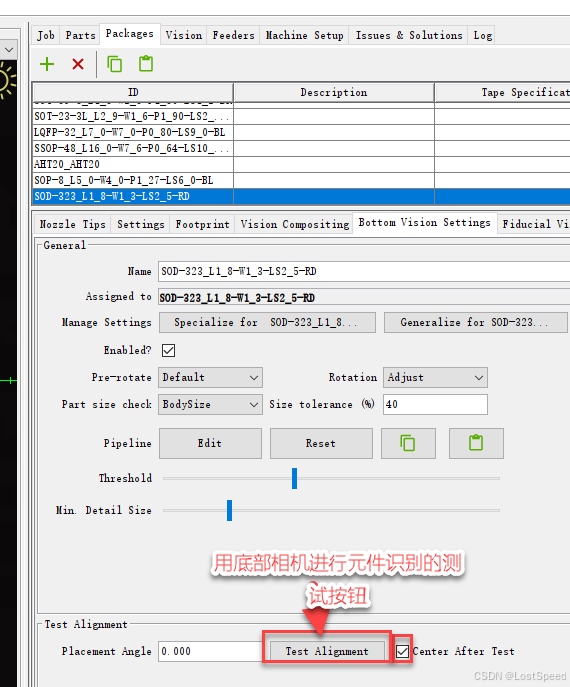
测试完成后,将元件放回编带,不要浪费元件
END

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)