2025年全国大学生电子设计竞赛基于单目视觉的目标物测量装置(C 题)国二作品
2025年全国大学生电子设计竞赛基于单目视觉的目标物测量装置(C 题)国二作品
摘 要
在工业检测与智能监控等领域,目标物距离与几何尺寸的高精度测量具有重要应用价值。文章基于单目视觉的目标物测量装置方案以OpenMV摄像头为核心传感器,STM32F407微控制器为控制核心,实现基准线到目标物的距离D与几何图形尺寸x(边长或直径)的高精度测量。系统通过单目视觉算法完成目标识别、距离解算及尺寸计算功能,支持一键启动操作,并可实时显示测量结果与整机功耗信息。实验结果表明:在基本功能要求下,距离D的测量误差≤5cm,几何尺寸x的误差≤1cm;在发挥功能部分,距离D的测量误差优化至<2cm,几何尺寸x的误差≤0.5cm,同时实现复杂图形识别与低功耗优化(功耗降低≤5%)等扩展功能。该装置可广泛应用于工业检测、智能监控等领域。
关键词:单目视觉;目标物测量;OpenMV;STM32F407;低功耗优化
目录
1.1 主控模块的论证与选择
要实现题目的要求,有多种硬件方案可以选择,分别有:采用K230芯片作为主控处理器,结合普通单目相机实现功能;采用OpenMV模块作为视觉和主控处理器实现功能;采用OpenMV模块作为视觉处理器,结合STM32F407芯片作为下位机主控,两者数据交互实现功能。以下是三种方案的论证。
方案一:选用K230芯片。
优点:K230采用双核RISC-V处理器,集成专用AI加速单元,适合高效处理AI任务,并提供丰富的外设接口。针对嵌入式场景优化,在保持算力的同时降低能耗,适合便携式设备。
缺点:作为新一代芯片,开发案例相对较少,开发基本依赖官方数据手册。部分外设驱动或功能(如特定摄像头型号)需要自行适配,存在比较高的验证成本。
方案二:选用OpenMV模块。
优点:OpenMV模块使用MicroPython作为开发语言,提供了简洁的API和丰富的示例代码;支持多种图像处理算法;采用了优质的图像传感器,可以在低光条件下工作,并能够实时采集高质量的图像数据。
缺点:OpenMV模块计算能力较弱,硬件接口有限,对于一些特殊的定制需求无法满足要求。
方案三:OpenMV模块结合STM32F407处理器。
优点: OpenMV模块具有丰富的图像处理功能,STM32F407微控制器具有强大的计算能力,可以承担复杂的控制算法和决策逻辑;且STM32F407微控制器提供多个GPIO接口、UART、SPI、I2C等常见接口,可以方便地连接外部传感器、执行器等设备,并与OpenMV模块进行数据交互,且该方案的硬件功耗比方案一要低。
缺点:开发复杂度较高,需要处理比较多的数据交互;同时使用两个模块,硬件兼容复杂度较高。
基于以上论证,综合考虑采用方案三,因为该组合方案能更好地平衡图像处理、实时控制和低功耗需求。
1.2系统总体流程
基于OpenMV模块的智能测量系统工作流程如下,系统初始化后,通过按键触发电流监测和目标识别,视觉处理后输出测量结果(含基本测量和三种高级测量),最后进行功耗优化并循环等待下次测量,期间通过LCD显示屏实时显示OpenMV模块的输出数据。系统总体流程图如图1所示。
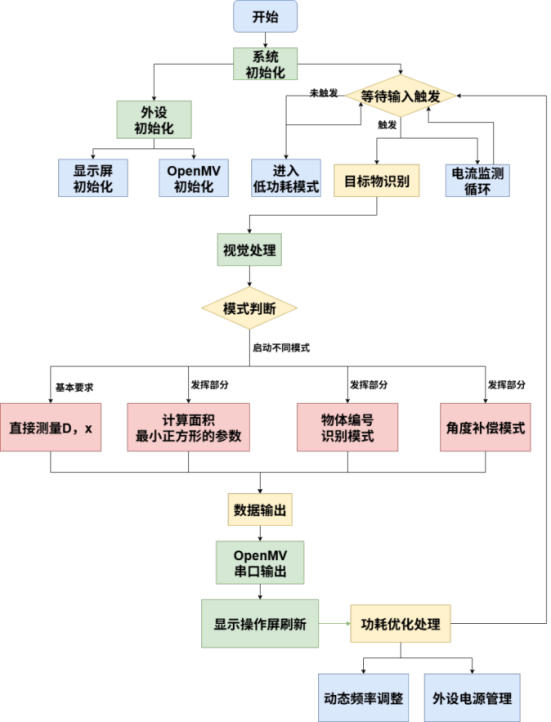
图1 系统总体流程图
2.程序理论分析与计算
2.1测量距离D:
单目视觉算法基于透视成像原理实现目标识别与参数解算,通过分析目标在图像中的成像几何关系,建立摄像头与目标物之间的透视投影模型,进而计算两者间的实际距离。基于透视成像原理,当参考距离下目标边框的图像像素宽度已知时,当前帧中边框像素宽度与目标距离呈反比关系:像素宽度增大表明目标靠近,像素宽度减小则表明目标远离。通过建立参考像素宽度与对应实际距离的标定比例关系,可依据公式(1-1)计算被测物与相机的实时距离。

(1-1)
其中,D为被测目标与相机的距离,

为参考距离,

为参考像素宽度,

为当前像素宽度。
2.2.测量目标图形边长/直径x:
目标物体物理边长的计算基于其在图像中的像素宽度与实际物理尺寸的线性映射关系。具体而言,通过已知实际物理宽度与其在图像中对应的像素宽度建立标定比例关系,该比例在整个图像范围内保持恒定。计算过程中,首先确定目标物体在图像中的像素宽度,然后计算其与标定边框像素宽度的比值,最后将该比值乘以标定的实际物理宽度(如A4纸宽度),从而反推出目标物体的真实物理边长。计算公式如公式(1-2)所示。
(1-2)
其中, L为目标实际边长,

为目标的像素宽度,

为边框的像素宽度,

为边框的真实宽度。
2.3目标物绕Z轴旋转测试
目标物绕Z轴旋转30°~60°时,相机图像会形成透视关系,但算法基于边框、像素宽度和密度等稳定特征进行识别,不依赖规则形状,仍可准确测量边长和距离。通过动态ROI筛选和中心优先检测,提升倾斜适应性和鲁棒性,确保识别精度。
2.4识别面积最小正方形
本算法通过在图像中对目标物体的边缘像素进行多方向扫描,估算其边长。首先在识别出的黑色目标边缘处设置多个起始点,并沿水平、垂直等方向逐步向外扫描像素灰度值。当扫描过程中连续检测到灰度值大于阈值的像素点时,判定为已达到物体与背景的边界。通过记录起始点到边缘的像素距离,并对多个方向的结果取平均,可有效估算该物体的边长。该方法能够在目标形状部分重叠、轮廓不完整或轻微畸变的情况下,仍实现对边长的稳健测量。
2.5通过识别数字标识正方形
本算法通过模板匹配方法,在图像中查找与预设模板图像最相似的区域。程序首先加载一组以指定数字命名的模板图像,这些模板图像代表目标在不同尺寸或位置下的外观特征。然后对摄像头当前帧图像使用NCC(Normalized Cross Correlation)算法进行匹配,通过遍历每个模板,评估其在整幅图像中的相似度分布。当某一位置的相似度高于设定阈值时,即认为目标被成功检测,并在图像上框选标记。该方法适用于在结构稳定、光照可控的场景中对特定图案的快速定位识别。
2.6测量重叠图像中最小正方形面积
测量重叠图像最小正方形面积算法首先对图像进行二值化处理,通过阈值分割提取黑色色块作为前景(黑变白,其余为黑),查找白色连通区以获取黑色目标轮廓;接着进行多边形拟合与顶点提取,用多边形拟合、轮廓简化(精度 5%)提取主要顶点,当角点数量为 4 时判定为四边形;接着依据欧氏距离公式 (式2-1)计算四条边长度并存于 sides,以均值为边长识别重叠黑色正方形;最后将检测到的正方形按平均边长排序,标记、绘制最小正方形的边框并显示边长,可在重叠场景下稳定提取最小正方形。

(2-1)
3.电路设计
3.1方案论证
在电流检测方案的选择上,有两种方案可供考量:
方案一:采用ACS712霍尔传感器非接触测量电流,输出线性电压,无需采样电阻,但精度低、温漂大,小电流误差超8%,且易受干扰。
方案二:采用INA193搭建的高侧检测电路,通过精密采样电阻(0.1Ω)和20V/V固定增益放大器实现电流检测。配合1%精度低温漂电阻和RC滤波,在100mA~600mA范围内误差稳定在3.0%以内,满足≤5%的要求。该方案采用分立元件,符合竞赛规则,且静态电流仅100μA,功耗极低。
实测显示,在系统 100mA~600mA 工作电流范围内,方案二相对误差稳定在 3.0% 以内,优于 5% 的要求;且电路由分立元件搭建,不使用商品模块,符合竞赛规则;INA193 静态电流仅 100μA,对系统功耗影响极小,利于低功耗优化。
综上,方案二能满足≤5% 的误差要求且符合规则,更为合适。
3.2.硬件系统总体框图

图2硬件系统总体框图
该硬件系统以STM32F407F103C8T6微控制器为核心,采用5V直流稳压电源供电。系统电源回路中设置测量模块(包含0.1Ω采样电阻与INA193运算放大器),用于实时监测供电电流;主供电回路为功能模块(集成OpenMV视觉处理单元与液晶显示模块)提供电力支持。其中,OpenMV模块负责图像采集与分析处理,液晶显示屏作为人机交互界面,通过STM32F407微控制器实现系统级统筹控制,共同构建嵌入式视觉处理基础架构。
3.3供电电流测量电路实现
3.3.1电路性能优势
该电路静态工作电流约为100μA,对系统整体功耗影响甚微,有效支撑系统低功耗设计目标的实现。电路工作电压范围为2.7V至5.5V,兼容外部5V直流稳压电源供电。输出端提供与采样电流成线性比例关系的模拟电压信号,可直接接入STM32F407微控制器的ADC引脚进行模数转换,避免了通信延迟问题,确保系统满足5秒内完成测量并显示的实时性指标要求。
3.3.2 PCB 设计与制作
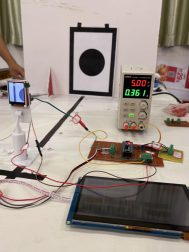
图3 电路设计原理图与实物图
自主设计单层布局优化的 PCB 电路,利用实验室转印机与腐蚀工艺制作电路板,成本低、效率高,无需高端设备,适合竞赛快速原型开发。
布线采用高分辨率转印纸及精确曝光控制,实现 0.3mm 最小线宽,保障信号线路隔离性与布线密度。关键通路(5V 输入/输出电源主通路、采样电阻连接路径)铜线宽度增至 1.0mm 以上,依据焦耳定律
,可减小电阻,降低损耗与发热,避免焊点虚焊、元件老化或 PCB 碳化等问题。
大电流路径采用大面积铺铜 + 过孔阵列设计,增大散热面积并加速热量传导,增强散热能力,提升长期工作稳定性与可靠性。
3.3.3采样电阻的选型

图4 INA193结构图
选用 0.1 欧姆、1% 精度、1/4 瓦贴片电阻,原因如下:
精度与信号强度:500mA 工作电流时,采样电阻压降 50mV,经 INA193 芯片 20 倍放大后输出 1.0V,可充分利用微控制器 ADC 输入量程,提高测量分辨率和精度。
低功耗与低压降:最大工作电流下,电阻功耗仅 25mW,温升可忽略;50mV 压降对 5V 供电系统影响极小,保障 OpenMV、STM32F407 等核心器件供电稳定。
芯片兼容:INA193 最大输入差分电压为 ±100mV,50mV 压降在安全范围内,确保芯片安全可靠运行,避免信号过大导致饱和或损坏电源。
4.测试方案与测试结果
4.1测试方案
4.1.1 基本要求测试
测试目的:验证装置对三个目标物(圆形、三角形、正方形)的直径(D)和位置(x)的测量能力,并监测供电电流(IS)的精度。
测试步骤:1.随机摆放目标物于指定位置,一键启动装置,记录显示的D和x值,每个目标物重复测试。2.实时监测IS,用高精度电流表测量实际电流(I实际),计算相对误差(式4-1),要求误差≤5%。

(4-1)
4.1.2 发挥部分测试
测试目的:验证装置对复杂目标物(正方形识别、倾斜适应)的测量能力及功耗优化效果。
测试步骤:1.随机选取目标物,测量并记录D和x;输入指定正方形编号,测量其x值。2.将目标物倾斜30°~60°,验证倾斜适应性。3.全程监测功耗P和Pmax,用功率分析仪校准,确保显示值准确。
4.2测试条件与仪器
测试条件:进行测试时需要在控制环境下进行,确保没有外部干扰。进行不同情况下的测试,包括图形垂直、图形旋转、正方形组合图形等情况。
测试仪器:openmv、STM32F407c8t6、显示屏、电源。
4.3测试结果及分析
4.3.1测试数据记录
根据我们的测试,基于单目视觉的目标物测量装置系统使用openmv实现的测试结果如下:
表4-1 测试结果表
|
基本目标物 |
正方形(第一次) |
三角形(第一次) |
圆 |
正方形(第一次) |
三角形(第二次) |
|
D(mm) |
1696.97 |
1696.97 |
1750.00 |
1931.03 |
1493.33 |
|
X(mm) |
105.61 |
106,63 |
101.12 |
120.63 |
106.40 |
|
成功(是/否) |
是 |
是 |
是 |
是 |
是 |
表4-2 测试结果表
|
目标物 |
正方形 |
三角形 |
圆 |
重叠正方形 |
带数字正方形 |
|
Is |
0.369 |
0.393 |
0.409 |
0.452 |
0.382 |
|
P |
2,04 |
1.75 |
1.81 |
1.84 |
2.30 |
|
P最大值 |
2.50 |
2.52 |
2.52 |
2.52 |
2.52 |
|
成功(是/否) |
是 |
是 |
是 |
是 |
是 |
4.3.2测试结果分析与优化
根据上述测试结果,我们可以得出以下结论:
1、在基本要求部分,每一点都在要求范围内。
2、在发挥要求部分中,都达到了要求,且测量精度高。
3、 经过测试,通过分析数据可得,作品已完成了题目中的各项要求。
综上,单目视觉的目标物测量装置完全满足各项要求,测量精度高且性能稳定,为相关领域提供了实用的低成本高效测量方案。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 20
20 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)