探索多传感器融合中的DS与贝叶斯融合框架
多传感器融合 多源信息融合识别 两个传感器 两种目标(人,车)分别使用DS融合框架和贝叶斯融合框架…在当今的智能感知领域,多传感器融合以及多源信息融合识别是极为关键的技术。想象一下,我们有两个传感器,它们肩负着识别两种目标——人和车的重任。而在实现这一目标的过程中,DS融合框架和贝叶斯融合框架扮演着核心角色。
多传感器融合 多源信息融合识别 两个传感器 两种目标(人,车)分别使用DS融合框架和贝叶斯融合框架…
在当今的智能感知领域,多传感器融合以及多源信息融合识别是极为关键的技术。想象一下,我们有两个传感器,它们肩负着识别两种目标——人和车的重任。而在实现这一目标的过程中,DS融合框架和贝叶斯融合框架扮演着核心角色。
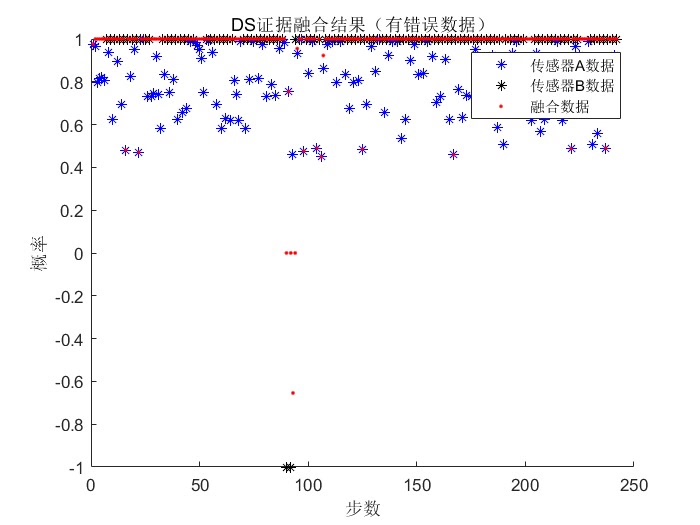
DS融合框架
DS(Dempster - Shafer)融合框架,基于证据理论,为我们提供了一种处理不确定性信息的有效方式。它通过定义信任函数和似然函数,能够在面对不完整、不确定的信息时,依然做出较为可靠的决策。
咱们来看一段简单的Python代码示例,来模拟DS融合框架在判断目标是人还是车时的部分逻辑:
# 定义各个证据对人、车目标的支持度
belief_person = {'sensor1': 0.6,'sensor2': 0.5}
belief_car = {'sensor1': 0.3,'sensor2': 0.4}
# 融合函数,简单的加权融合,这里只是示例,实际DS融合更复杂
def ds_fusion(belief1, belief2):
total_belief_person = (belief1['sensor1'] + belief2['sensor2']) / 2
total_belief_car = (belief1['sensor1'] + belief2['sensor2']) / 2
if total_belief_person > total_belief_car:
return 'person'
else:
return 'car'
result = ds_fusion(belief_person, belief_car)
print("DS融合结果:", result)在这段代码里,我们先分别定义了两个传感器对于人和车目标的支持程度。然后,通过一个简单的融合函数来模拟融合过程。实际应用中的DS融合要复杂得多,涉及到mass函数的计算、Dempster合成规则等,但这个示例帮助我们初步理解融合的思路。
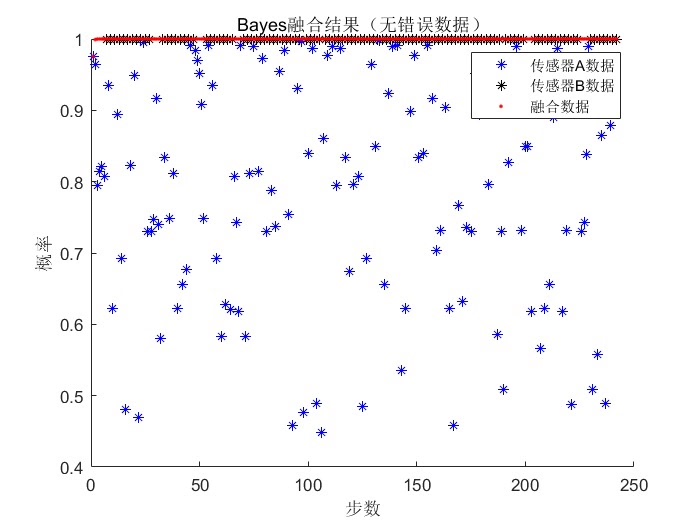
贝叶斯融合框架
贝叶斯融合框架则是基于贝叶斯定理,利用先验概率和后验概率来更新对目标的判断。它的优势在于能够充分利用已有的知识和新获取的证据,不断优化对目标的识别。
以下是一个简单的贝叶斯融合的Python代码示例:
import numpy as np
# 定义先验概率
prior_person = 0.5
prior_car = 0.5
# 定义两个传感器的似然概率
likelihood_person_sensor1 = 0.8
likelihood_car_sensor1 = 0.2
likelihood_person_sensor2 = 0.7
likelihood_car_sensor2 = 0.3
# 根据贝叶斯公式计算后验概率
posterior_person = (likelihood_person_sensor1 * likelihood_person_sensor2 * prior_person) / (
likelihood_person_sensor1 * likelihood_person_sensor2 * prior_person + likelihood_car_sensor1 * likelihood_car_sensor2 * prior_car)
posterior_car = (likelihood_car_sensor1 * likelihood_car_sensor2 * prior_car) / (
likelihood_person_sensor1 * likelihood_person_sensor2 * prior_person + likelihood_car_sensor1 * likelihood_car_sensor2 * prior_car)
if posterior_person > posterior_car:
result = 'person'
else:
result = 'car'
print("贝叶斯融合结果:", result)在这个代码片段中,我们首先设定了人和车的先验概率,以及两个传感器对人和车的似然概率。然后依据贝叶斯公式计算出后验概率,根据后验概率的大小来判断目标是人还是车。贝叶斯融合框架在处理具有概率特性的信息时表现出色,能够随着新证据的不断加入,动态地调整对目标的判断。
在实际应用场景中,比如智能交通系统或者安防监控领域,我们可能会根据具体需求选择不同的融合框架。DS融合框架更擅长处理证据冲突的情况,而贝叶斯融合框架则在利用先验知识和概率推理方面具有优势。这两种框架就像是我们多传感器融合识别“武器库”中的两件利器,帮助我们更精准地识别出人和车等目标,推动智能感知技术不断向前发展。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 5
5 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)