使用宇树Unitree-GO1完成视觉巡线
本文介绍了2024睿抗机器人比赛物资运输任务的解决方案。采用宇树Unitree-GO1四足机器人搭载机械臂,通过多摄像头协同工作完成视觉巡线、物资识别与搬运任务。系统架构分为三个主要模块:nano13负责头部巡线、nano14控制机械臂、nano15识别二维码,树莓派负责运动控制。重点阐述了基于HSV颜色空间和最长白列法的巡线算法实现,以及PID控制器的参数设计和误差计算方法。文中详细给出了主控制
概要
2024睿抗机器人比赛,物资运输使用宇树Unitree-GO1完成视觉巡线.
要求使用宇树四足机器人(go1、go2、A1等)并搭载机械臂,进行物资识别、物资抓取、物资运输、物资卸载、回到出发点
整体架构流程
将任务分为以下部分:
1.视觉巡线
2.二维码扫描(为是否进入环岛、物资选择等准备)
比赛地图
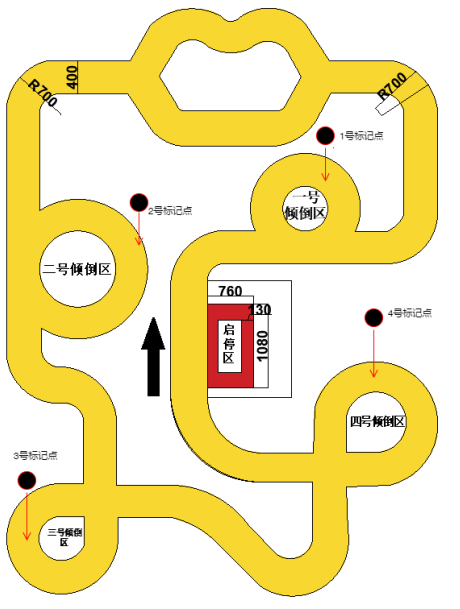
图1 比赛地图
技术名词解释
-
nano13->该nano为头部下巴相机,主要进行巡线
-
nano14->该nano对机械臂(ESP32主控),通过串口与nano14进行通讯
-
nano15->该nano对应go1的腹部相机,主要负责识别Aruco二维码
-
树莓派->主要负责运动部分
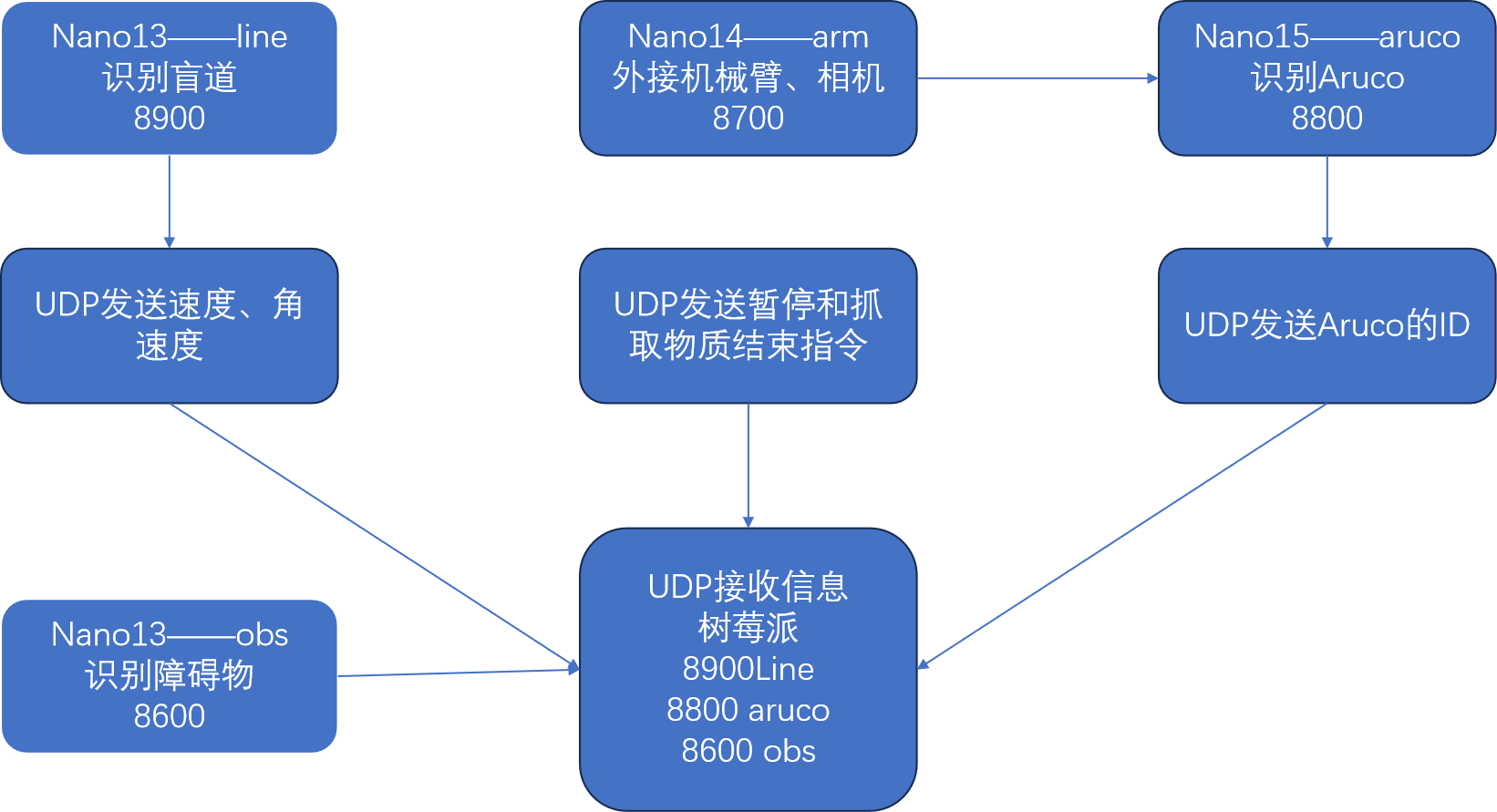
- 图2 控制框架
技术细节
nano巡线方法:
盲道的颜色为黄色,其余地区颜色为白色,使用HSV颜色空间进行过滤.后续使用最长白列法进行盲道的中线的计算,
先写一个使用HSV的巡线函数:这是主函数,阈值分割的部分放在trans.h和line_follow.h文件中
#include <opencv2/imgcodecs.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>
#include <unistd.h>
#include <stdlib.h>
#include <UnitreeCameraSDK.hpp>
#include "viz.h"
#include "opencv.h"
#include "LinuxUdp.h"
#include <trans.h>
#include <line_follow_h.h>
#include <PID.h>
using namespace std;
using namespace cv;
using namespace LinuxUdp;
struct PACK
{
int mode=0;//运动模式
double v=0;//直线速度
double yaw=0;//转向速度
};//这里是这个包是需要发送给树莓派的
int main(int argc, char *argv[]){
UdpClient udp_client("192.168.123.161", 8900);//初始化UDP通讯
PACK pack;
//下面部分是初始化并调用相机的程序 具体可以参考Unitree的camera_sdk
int deviceNode = 0; ///< default 0 -> /dev/video0
cv::Size frameSize(1856, 800); ///< default frame size 1856x800
int fps = 30; ///< default camera fps: 30
if(argc >= 2){
deviceNode = std::atoi(argv[1]);
if(argc >= 4){
frameSize = cv::Size(std::atoi(argv[2]), std::atoi(argv[3]));
}
if(argc >=5)
fps = std::atoi(argv[4]);
}
UnitreeCamera cam("stereo_camera_config.yaml"); ///< init camera by device node number
if(!cam.isOpened()) ///< get camera open state
exit(EXIT_FAILURE);
cam.setRawFrameSize(frameSize); ///< set camera frame size
cam.setRawFrameRate(fps); ///< set camera camera fps
cam.setRectFrameSize(cv::Size(frameSize.width >> 2, frameSize.height >> 1)); ///< set camera rectify frame size
cam.startCapture(); ///< disable image h264 encoding and share memory sharing
usleep(5000);
//下面部分是为了方便调试 做的一个窗口可视化跳帧HSV的范围
int hmin = 0, hmax = 179, smin = 0, smax = 255, vmin = 0, vmax = 255;
namedWindow("window");
createTrackbar("hmin", "window", &hmin, 179);
createTrackbar("hmax", "window", &hmax, 179);
createTrackbar("smin", "window", &smin, 255);
createTrackbar("smax", "window", &smax, 255);
createTrackbar("vmin", "window", &vmin, 255);
createTrackbar("vmax", "window", &vmax, 255);
int count0=0;
while(cam.isOpened()){
cv::Mat left,right;
if(!cam.getRectStereoFrame(left,right)){ ///< get rectify left,right frame
usleep(1000);
continue;
}
Mat temp,temp2,hsv,hsv2;
cv::flip(left,left, -1);
cv::flip(right,right,-1);
cvtColor(left,temp,COLOR_BGR2HSV);
cvtColor(right,temp2,COLOR_BGR2HSV);
Scalar low(hmin,smin,vmin);
Scalar high(hmax,smax,vmax);
inRange(temp,low,high,hsv);
inRange(temp2,low,high,hsv2);
imshow("hsv2",hsv2);
imshow("HSV",hsv);
// Mat Thr=hsvimage(left);
// Mat Thr=hsvimage2(left);
int size=find_line(hsv,left).size;
double error=find_line(hsv,left).err+find_line(hsv2,right).err;
double kp = 0.03; // 比例系数
double ki = 0.0001; // 积分系数
double kd = 0.0001; // 微分系数
double dt = 0.01; // 时间间隔(秒)
PIDController pid(kp, ki, kd, dt);
// 假设的偏转值(偏差)
float setpoint = 0.0; // 期望的偏转值(例如,0表示直线行驶)
float measured_value = error; // 测量的偏转值
// 直线速度和转向速度输出
float linear_speed = 0.0;
float steering_speed = 0.0;
pid.Update(setpoint, measured_value , linear_speed, steering_speed);
pack.mode=1;
pack.v=0.1f;//中速
pack.yaw=steering_speed;
if(pack.yaw>=0.6){
pack.yaw=0.6;
}
if(pack.yaw<=-0.6){
pack.yaw=-0.6;
}
//cv::imshow("Longlat_Rect", stereo);
char key = cv::waitKey(10);
if(key == 27) // press ESC key
break;
cout<<"mode="<<pack.mode<<"\t"<<"直线速度"<<pack.v<<"\t"<<"转向速度"<<pack.yaw<<endl;
udp_client.UdpSend((void*)&pack, sizeof(PACK));
}
cam.stopCapture(); ///< stop camera capturing
return 0;
}
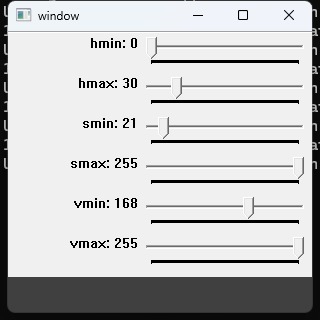
图3 HSV调整窗口
PID部分代码
#include <unistd.h>
#include <stdlib.h>
#include "viz.h"
using namespace std;
class PIDController {
public:
PIDController(double kp, double ki, double kd, double dt)
: kp_(kp), ki_(ki), kd_(kd), dt_(dt), integral_(0.0), prev_error_(0.0) {}
// 更新PID控制器,返回直线速度和转向速度
void Update(float setpoint, float measured_value,
float & linear_speed, float & steering_speed) {
float error = setpoint - measured_value;
// 积分项
integral_ += error * dt_;
// 微分项
double derivative = (error - prev_error_) / dt_;
// PID计算
double output = kp_ * error + ki_ * integral_ + kd_ * derivative;
linear_speed = output * kLinearSpeedScale; // kLinearSpeedScale 是直线速度的比例系数
steering_speed = output * kSteeringSpeedScale; // kSteeringSpeedScale 是转向速度的比例系数
// 更新之前的误差
prev_error_ = error;
}
private:
double kp_; // 比例系数
double ki_; // 积分系数
double kd_; // 微分系数
double dt_; // 时间间隔
double integral_; // 积分项
double prev_error_; // 上一次的误差
static const float kLinearSpeedScale;
static const float kSteeringSpeedScale;
};
const float PIDController::kLinearSpeedScale = 1;
const float PIDController::kSteeringSpeedScale = 0.05; 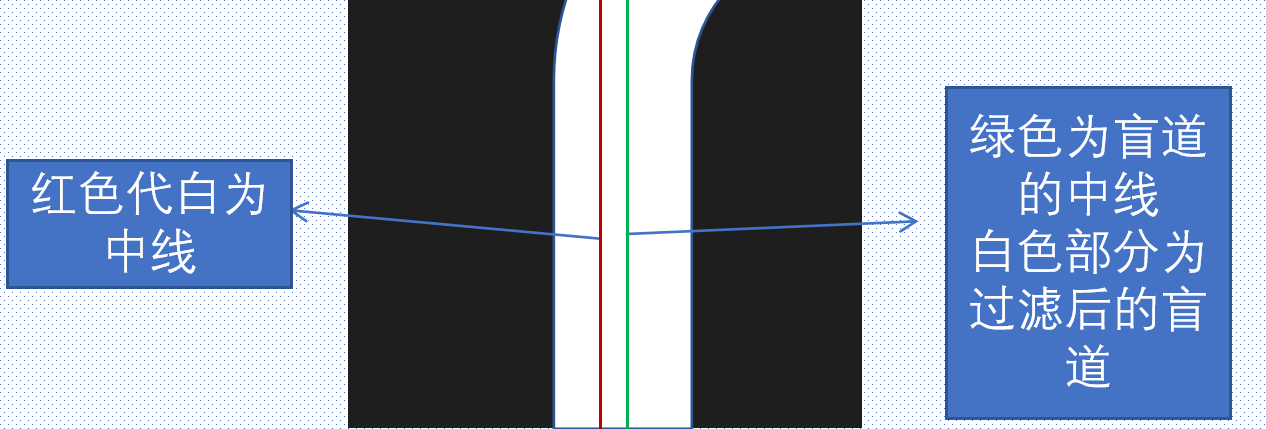
PID控制的作用是使机器人能够准确沿盲道中央行走。以图示情况为例,红色中线位于白色盲道中线的左侧,表明机器人当前姿态偏左,存在一定的横向误差。为了消除该误差,使其回到盲道中央(即期望位置),需施加一个向右的转向速度。
我们可以通过PID控制器计算该转向速度。假设图像大小为100×100像素,期望的中央位置为横坐标50像素(红色标识线),而实际检测到的机器人位置为60像素(绿色标识线),则当前误差可计算为:
error = 当前值 - 期望值 = 60 - 50 = 10
PID控制器根据该误差计算输出量,其三个组成部分如下:
-
比例项(P):将误差乘以比例系数 kp,即
P = kp × error
反映当前误差的直接影响。 -
积分项(I):对误差进行积分,用于消除稳态误差。其计算为:
integral += error × dt
I = ki × integral
其中 dt 为采样时间间隔。 -
微分项(D):反映误差变化率,提高系统稳定性。其计算为:
derivative = (error - prev_error) / dt
D = kd × derivative
最终的控制输出为三项之和:
output = P + I + D = kp × error + ki × integral + kd × derivative
通过调节 kp、ki、kd 三个参数,可优化机器人的横向控制性能,使其平稳、准确地跟踪盲道中心线。
树莓派控制主函数
#include "unitree_legged_sdk/unitree_legged_sdk.h"
#include <math.h>
#include <iostream>
#include <unistd.h>
#include <string.h>
#include "LinuxUdp.h"
using namespace UNITREE_LEGGED_SDK;
LinuxUdp::UdpServer udp_server0(8900); //line_follow
LinuxUdp::UdpServer udp_server1(8800); //8800为接受ARUCO
struct PACK0
{
int mode;
double v;
double yaw;
};
struct PACK1
{
int mode;
int count;//起停区
int aruco_ID; //倾倒区
int a_count;
};
class Custom
{
public:
Custom(uint8_t level):
safe(LeggedType::Go1),
udp(8090, "192.168.123.161", 8082, sizeof(HighCmd), sizeof(HighState))
{
udp.InitCmdData(cmd);
}
void UDPRecv();
void UDPSend();
void RobotControl();
Safety safe;
UDP udp;
HighCmd cmd = {0};
HighState state = {0};
int motiontime = 0;
int time=0;
float dt = 0.002; // 0.001~0.01
};
void Custom::UDPRecv()
{
udp.Recv();
}
void Custom::UDPSend()
{
udp.Send();
}
void Custom::RobotControl()
{
PACK0* pack0;
pack0 = new PACK0; //nano 13
PACK1* pack1;
pack1 = new PACK1; //nano 15
udp_server0.UdpRecv((void*)pack0);
udp_server1.UdpRecv((void*)pack1);
motiontime += 2;
udp.GetRecv(state);
cmd.mode = 0; // 0:idle, default stand 1:forced stand 2:walk continuously
cmd.gaitType = 0;
cmd.speedLevel = 0;
cmd.footRaiseHeight = 0;
cmd.bodyHeight = 0;
cmd.euler[0] = 0;
cmd.euler[1] = 0;
cmd.euler[2] = 0;
cmd.velocity[0] = 0.0f;
cmd.velocity[1] = 0.0f;
cmd.yawSpeed = 0.0f;
cmd.reserve = 0;
if(time==0){
cmd.mode = 2;
cmd.velocity[0] = 0.0f;
cmd.velocity[1] = 0.25f;
time=1;
}
if(pack1->mode==-2){//起停区
cmd.mode = 2;
cmd.velocity[0] = 0.0f;
cmd.velocity[1] = -0.25f; //给一个V=0.25的横向速度 //暂停2S;
}
if(pack1->mode==-1){//倾倒区
if(pack1->aruco_ID==1||pack1->aruco_ID==2){
if (pack1->a_count==1)
{
cmd.mode=2;
cmd.velocity[0]=0.1f;
cmd.yawSpeed=-0.2f;
}
if (pack1->a_count==2||pack1->a_count==3)
{
cmd.mode=2;
cmd.velocity[0]=0.2f;
cmd.yawSpeed=0.0f;
}
}
else
{
if (pack1->a_count==1)
{
cmd.mode=2;
cmd.velocity[0]=0.1f;
cmd.yawSpeed=0.0f;
}
if (pack1->a_count==2)
{
cmd.mode=2;
cmd.velocity[0]=0.1f;
cmd.yawSpeed=0.0f;
}
if (pack1->a_count==3)
{
cmd.mode=2;
cmd.velocity[0]=0.0f;
cmd.yawSpeed=0.3925f; //要等2s
}
}
}
/* if(pack1->mode==-3)
{
cmd.mode=0;
cmd.yawSpeed=0;
cmd.velocity[0]=0;
cmd.velocity[1]=0;
cout<<"pack1.mode=-3"<<endl;
}*/
if(pack1->mode==0&&time==5){
cmd.mode=2;
cmd.velocity[0]=pack0->v;
cmd.yawSpeed=pack0->yaw;
}
udp.SetSend(cmd);
delete pack0;
delete pack1;
if(time==1){
this_thread::sleep_for(chrono::seconds(2));
cmd.mode=0;
cmd.yawSpeed=0;
cmd.velocity[0]=0;
cmd.velocity[1]=0;
time=5;
}
if(pack1->mode==-2){
this_thread::sleep_for(chrono::seconds(60));
}
if(pack1->mode==-1){
this_thread::sleep_for(chrono::seconds(2));
}
}
int main(void)
{
std::cout << "Communication level is set to HIGH-level." << std::endl
<< "WARNING: Make sure the robot is standing on the ground." << std::endl
<< "Press Enter to continue..." << std::endl;
std::cin.ignore();
Custom custom(HIGHLEVEL);
// InitEnvironment();
LoopFunc loop_control("control_loop", custom.dt, boost::bind(&Custom::RobotControl, &custom));
LoopFunc loop_udpSend("udp_send", custom.dt, 3, boost::bind(&Custom::UDPSend, &custom));
LoopFunc loop_udpRecv("udp_recv", custom.dt, 3, boost::bind(&Custom::UDPRecv, &custom));
loop_udpSend.start();
loop_udpRecv.start();
loop_control.start();
while(1)
{
sleep(10);
};
return 0;
}
小结
后续的有空再写吧 很久以前干的了 有点忘记了

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)