Reinforce Learning Concept Flow Chart (强化学习概念流程图)
它的核心是无后效性(Memorylessness),未来的状态仅依赖于当前状态和动作,与“过去的状态/动作序列”无关。当没有状态,只有一组最初未知奖励的可用动作时,这个问题就是经典的多臂老虎机(multi-armed bandit problem)。在每个特定时间点,智能体从环境结构一些观测(observation),并且必须选择一个动作(action),然后通过某种机制(有时称为执行器)将其传输
在强化学习中,智能体(agent)在一系列的事件步骤上与环境交互。在每个特定时间点,智能体从环境结构一些观测(observation),并且必须选择一个动作(action),然后通过某种机制(有时称为执行器)将其传输回环境,最后智能体从环境中得到奖励(reward)。注意,强化学习的目标是产生一个好的策略(policy)。强化学习智能体选择的“动作”受策略控制,即从一个环境观测映射到动作的功能。
当环境可被完全观测到时,强化学习问题被称为马尔可夫决策过程(Markov Decision Process)。它的核心是无后效性(Memorylessness),未来的状态仅依赖于当前状态和动作,与“过去的状态/动作序列”无关。这种性质让MDP的计算变得可行,它无需存储历史信息。当状态不依赖之前的动作时,我们称该问题为上下文老虎机(contextual bandit problem)。当没有状态,只有一组最初未知奖励的可用动作时,这个问题就是经典的多臂老虎机(multi-armed bandit problem)。
如下图所示: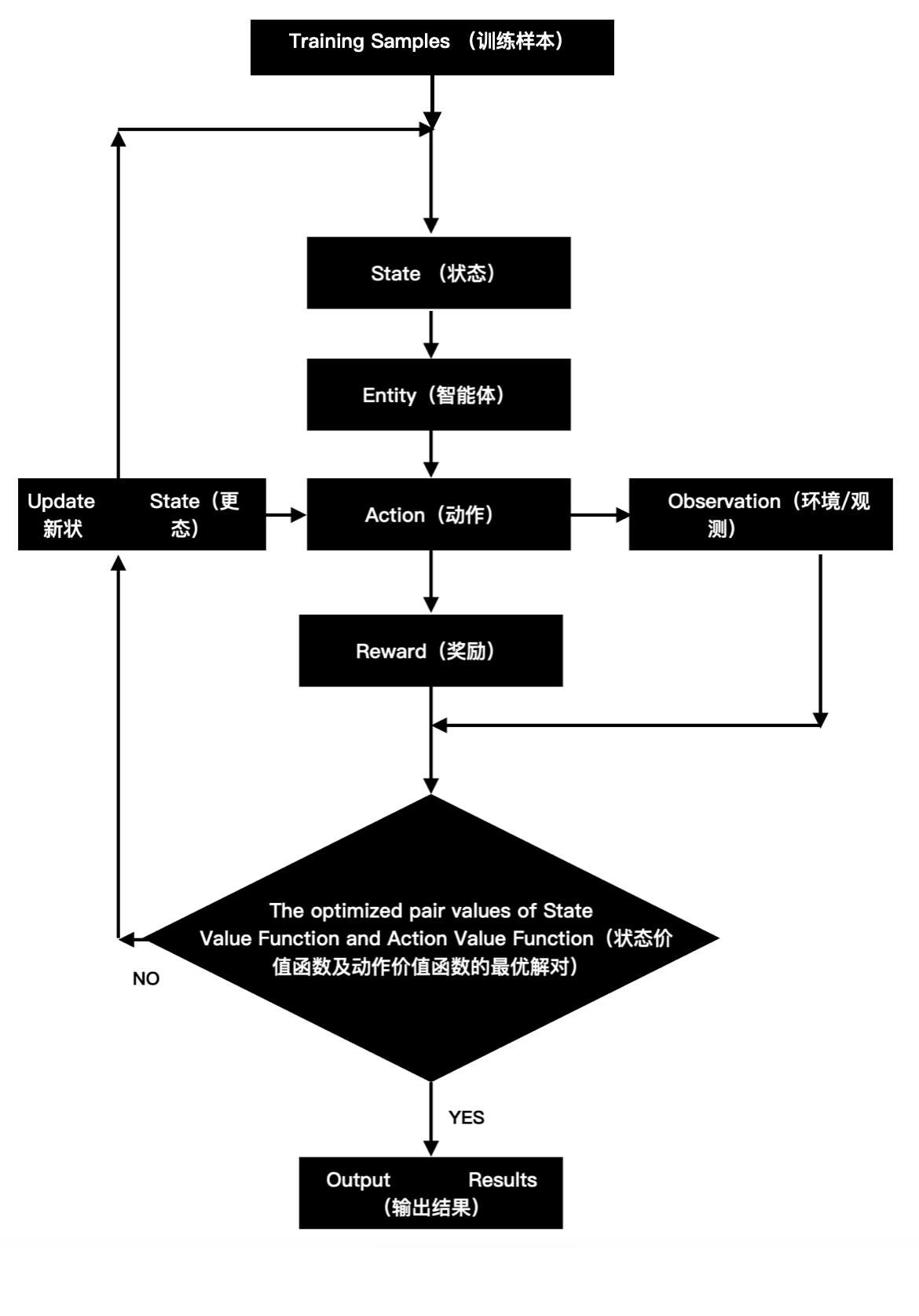
参考文献:
[1] 《动手学深度学习PyTorch版》
[2] www.alphachain.net.cn

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)