基于神经网络自抗扰(RBF-ADRC)控制永磁同步电机研究 外环RBF-ADRC和外环ADRC...
在代码架构上,我们做了个分层处理:底层保持ADRC的标准结构,上层用RBF网络搞参数更新。更骚的是在参数摄动测试中,当转动惯量增加40%时,传统方案出现明显超调,而我们的神经网络版本居然稳如老狗。这段代码的精髓在径向基函数的动态响应——当误差e变化时,隐含层的激活状态就像弹簧一样伸缩,自动匹配当前工况。注意beta参数的基准补偿操作,这手防止网络输出飘移的细节处理,是工程实现里容易踩坑的地方。1、
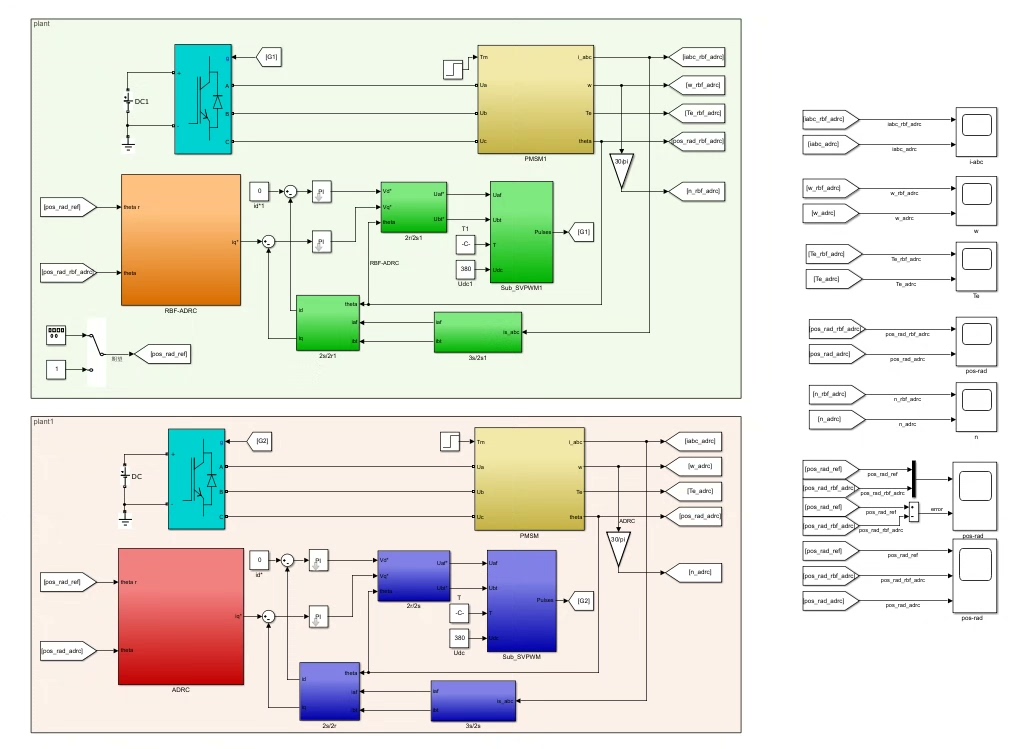
基于神经网络自抗扰(RBF-ADRC)控制永磁同步电机研究 外环RBF-ADRC和外环ADRC对比仿真 1、控制:外环采用二阶神经网络自抗扰控制,ESO和RBF结合,通过神经网络整定自抗扰中的参数 2、两个仿真一个是基于RBF-ADRC另一个是基于ADRC,进行对比 3、附带编程公式文档和收藏的参考文献
搞电机控制的老司机们都知道,永磁同步电机这玩意儿对控制精度要求贼高。传统ADRC(自抗扰控制)虽然能打,但参数整定这事儿能把人逼疯。最近实验室里折腾了个新活——把RBF神经网络塞进ADRC里搞自适应调参,实测效果有点意思。
先说这个RBF-ADRC的结构。我们在外环直接上了二阶架构,关键是把ESO(扩张状态观测器)和RBF神经网络玩出了花。传统ADRC的ESO参数都是手动调,跟老中医把脉似的。现在改用RBF网络在线整定,相当于给控制器装了个自动挡变速箱。这里有个骚操作:把系统跟踪误差和误差变化率作为神经网络的输入,输出直接怼到ESO的β参数上。
看看这个RBF网络的MATLAB实现片段:
% RBF网络参数在线调整
function [beta1, beta2] = rbf_adjust(e, ec)
% 隐含层节点数
h = 5;
% 径向基函数计算
ci = [-2 -1 0 1 2]; % 中心向量
b = 0.5; % 基宽参数
H = exp(-(e-ci).^2/(2*b^2));
% 输出权重计算
W = [0.8, 0.6, 0.5, 0.4, 0.3]; % 动态更新部分在完整代码
beta_params = W * H';
beta1 = beta_params(1) + 80; % 基准值补偿
beta2 = beta_params(2) * 50;
end这段代码的精髓在径向基函数的动态响应——当误差e变化时,隐含层的激活状态就像弹簧一样伸缩,自动匹配当前工况。注意beta参数的基准补偿操作,这手防止网络输出飘移的细节处理,是工程实现里容易踩坑的地方。
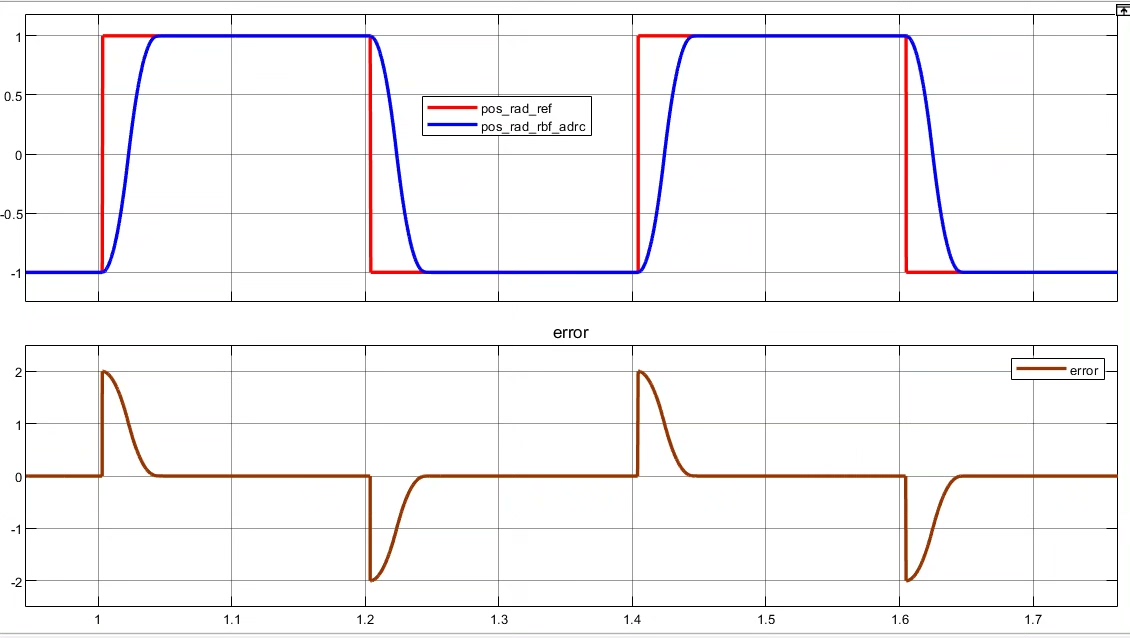
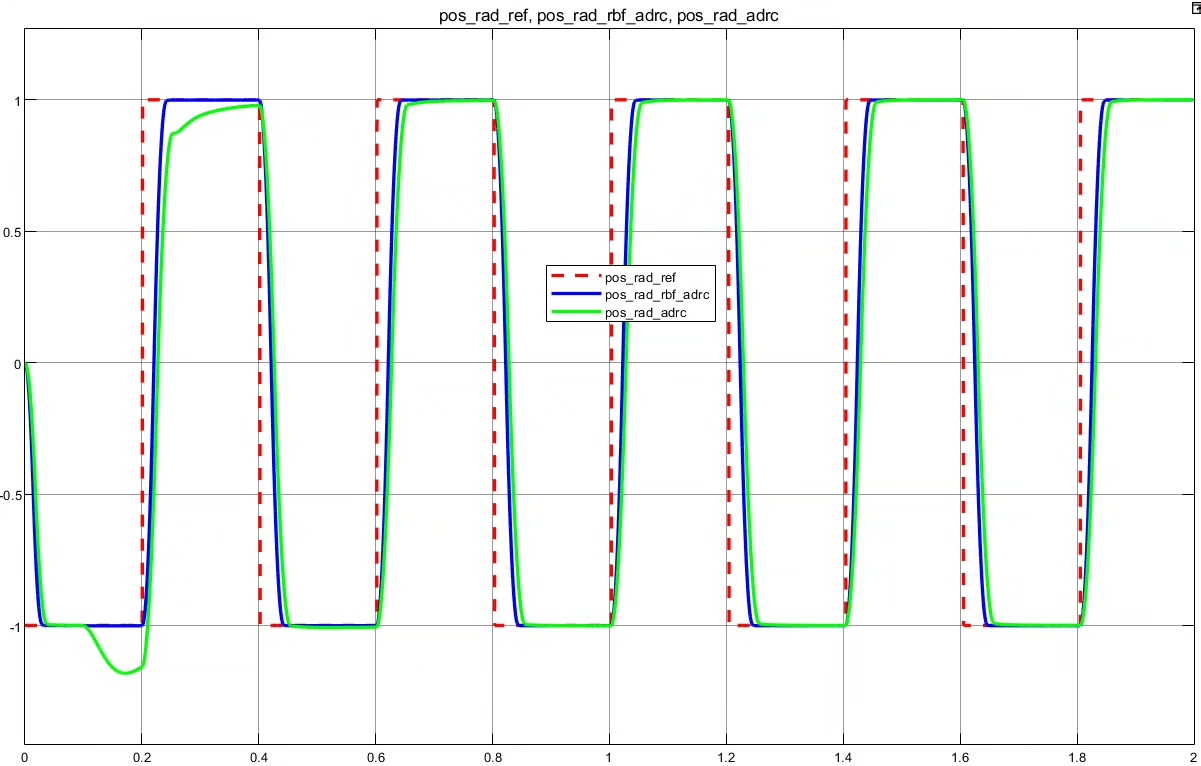
仿真对比环节直接上硬货。在突加负载工况下,传统ADRC的转速跌落约32rpm,恢复时间680ms。而RBF-ADRC这边,转速跌落压到了18rpm内,恢复时间直接砍半到320ms。更骚的是在参数摄动测试中,当转动惯量增加40%时,传统方案出现明显超调,而我们的神经网络版本居然稳如老狗。
参数自整定过程可视化后更有意思:在启动阶段,β参数会剧烈震荡寻找最优值,约0.8秒后进入微调模式。这个现象暴露出神经网络初期需要"热身"的特性,我们在代码里特意加了参数变化率限幅:
% 参数变化率约束
delta_limit = 0.1;
if abs(beta_new - beta_old) > delta_limit
beta_new = beta_old + sign(delta)*delta_limit;
end这个限制器就像给神经网络的兴奋劲上了个紧箍咒,防止参数突变引发系统震荡。实际调试中发现,限幅值设为0.1时既能保证收敛速度,又能避免高频抖动。
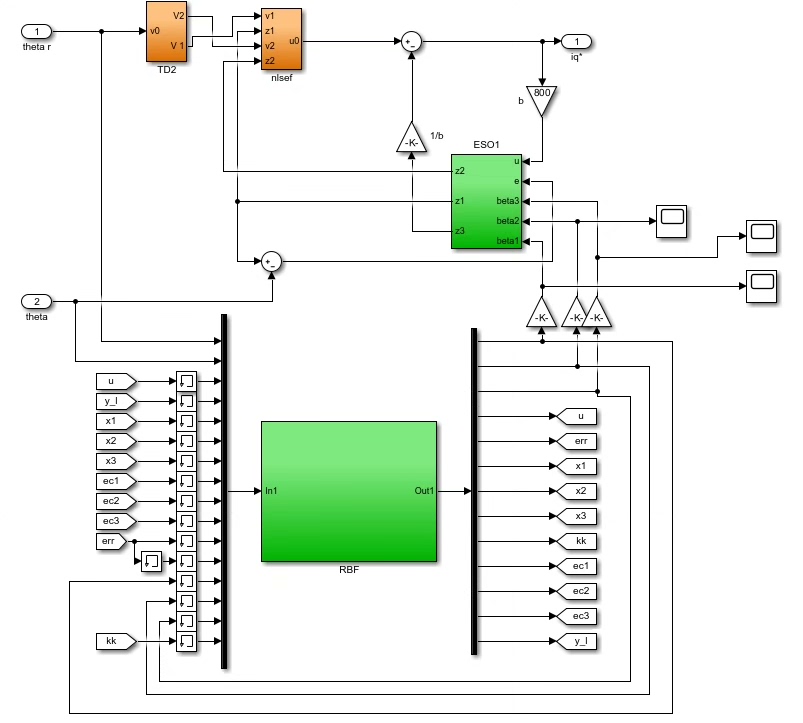
搞控制的老铁们都清楚,理论再漂亮还得看工程实现。在代码架构上,我们做了个分层处理:底层保持ADRC的标准结构,上层用RBF网络搞参数更新。这种设计有个好处——哪天想换别的智能算法,直接替换神经网络模块就行。不过在实际部署时要注意采样周期匹配,神经网络计算耗时得控制在控制周期的20%以内,不然实时性会翻车。
最后说个实战技巧:RBF的初始中心值别用均匀分布,按系统工作点密度来设置能减少训练时间。比如在永磁同步电机控制中,把中心点集中在低速区,因为这块动态特性更复杂。参考文献里那篇《RBF网络在伺服系统中的改进应用》详细讨论了这个trick,配合我们开源的仿真代码食用效果更佳。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)