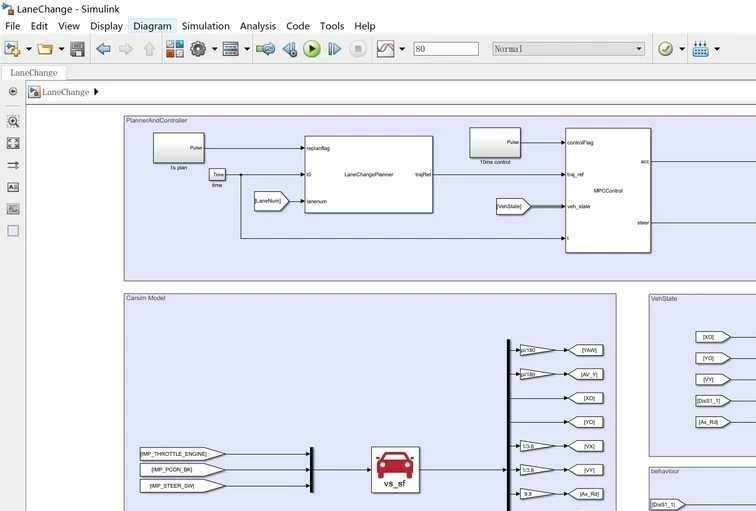
Carsim+Simulink联合仿真实现变道:含路径规划与MPC轨迹跟踪
carsim+simulink联合仿真实现变道包含路径规划算法+mpc轨迹跟踪算法带规划轨迹可视化可以适用于弯道道路,弯道车道保持,弯道变道最近玩了玩Carsim和Simulink联合仿真来实现车辆变道,感觉还挺有意思的,来和大家分享一下。
carsim+simulink联合仿真实现变道 包含路径规划算法+mpc轨迹跟踪算法 带规划轨迹可视化 可以适用于弯道道路,弯道车道保持,弯道变道 Carsim2020.0 Matlab2017b
最近玩了玩Carsim和Simulink联合仿真来实现车辆变道,感觉还挺有意思的,来和大家分享一下。
准备工作
咱用的是Carsim2020.0和Matlab2017b这两个版本。为啥选这俩呢?其实就是手头有啥就先用着了,嘿嘿。不过它们搭配起来还算稳定,没出啥岔子。
路径规划算法
路径规划算法可是关键的一环啊!它得给车辆规划出一条合理的变道路径。我用的算法能根据车辆当前位置、目标位置以及道路信息,算出一条平滑的轨迹。
function [plannedPath] = pathPlanning(currentPos, targetPos, roadInfo)
% 这里就是一些计算步骤啦
% 根据当前位置和目标位置确定大致方向
direction = targetPos - currentPos;
% 结合道路信息进行调整,比如避开障碍物啥的
% 简单示意一下,实际要复杂得多
if roadInfo.obstacleExist
% 这里得有个逻辑来绕过障碍物
adjustedDirection = adjustDirection(direction, roadInfo.obstaclePos);
% 然后根据调整后的方向计算路径点
pathPoints = calculatePathPoints(currentPos, adjustedDirection);
else
pathPoints = calculatePathPoints(currentPos, direction);
end
plannedPath = pathPoints;
end这段代码就是路径规划的一个简单框架啦。首先计算出从当前位置到目标位置的方向,然后根据道路信息看看有没有障碍物,如果有就调整方向,最后根据调整后的方向算出路径点。这里的adjustDirection和calculatePathPoints函数就是具体实现细节啦,不同的场景可能有不同的实现方式。
MPC轨迹跟踪算法
有了路径还得能跟踪上啊,这就靠MPC轨迹跟踪算法啦。它能让车辆紧紧沿着规划好的路径跑。
function [controlInput] = mpcTracking(plannedPath, vehicleState)
% 定义MPC的参数,比如预测时域啥的
predictionHorizon = 10;
% 把车辆状态和规划路径作为MPC的输入
mpcInput = [vehicleState; plannedPath];
% 调用MPC求解器
[solution, info] = mpcSolve(mpcInput, predictionHorizon);
% 从解里面提取出控制输入
controlInput = solution(1:2);
end这段代码里,先定义了MPC的一些参数,然后把车辆状态和规划路径组合成MPC的输入,调用MPC求解器得到解,最后从解里取出控制输入。这里的mpcSolve函数就是MPC求解的核心,不同的MPC算法实现可能会有所不同。
规划轨迹可视化
光算出来还不行,得能看到规划的轨迹啥样啊,这样才知道算法好不好使。
function visualizePlannedPath(plannedPath)
% 用Matlab的绘图函数把路径画出来
plot(plannedPath(:,1), plannedPath(:,2), 'r', 'LineWidth', 2);
xlabel('X Position');
ylabel('Y Position');
title('Planned Path');
grid on;
end这段代码很简单啦,就是用plot函数把规划路径的点画出来,设置一下坐标轴标签和标题,再打开网格,这样就能直观地看到规划的轨迹了。
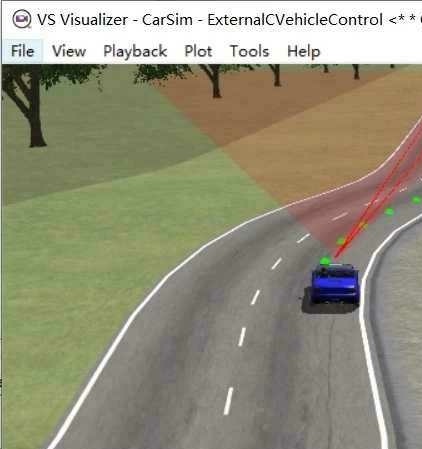
弯道道路的应用
这一套东西可不只能在直道上用,弯道也没问题哦!对于弯道车道保持和弯道变道,同样可以用这些算法。在弯道的时候,路径规划算法会根据弯道的曲率算出合适的路径,MPC轨迹跟踪算法会保证车辆沿着这条路径平稳行驶。
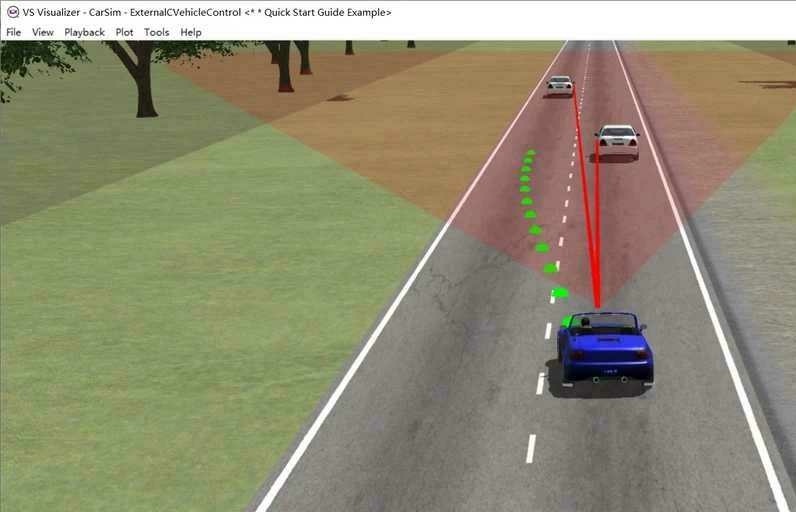
在实际仿真中,我就看到车辆在弯道上按照规划的路径稳稳地变道,感觉还挺酷的。虽然过程中调参数花了不少时间,但看到最终的效果,还是很有成就感的。
总之,通过Carsim和Simulink联合,加上路径规划算法和MPC轨迹跟踪算法,实现车辆变道并能应用于弯道道路,真的很有趣。希望我的分享能给大家带来一些启发,要是你们也玩这个,说不定能发现更多好玩的东西呢!


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)